Comments (2)
 leigh-johnson
commented on June 29, 2024
leigh-johnson
commented on June 29, 2024
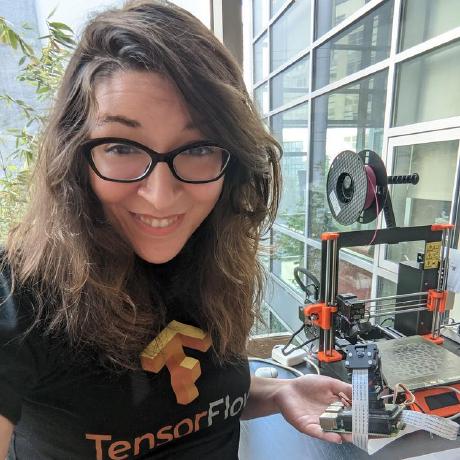
Thank you for reporting this @Martin2kid, sorry about the behavior here being difficult to debug. I'm guessing the default PID gains do not work for the distance or relative angle of the camera to tracking target in your setup. Another possibility is that your camera needs to be rotated (--rotation <int>). The default rotation values match the camera orientation in this picture:

In 2.0 (target: end of year), I'm shipping a rework of the PID control system that will fix this behavior for the face model. I'm going to close this and consolidate updates about the PID system in #48.
I'm truly amazed at all of the prototypes being developed from this quick tutorial! The original tutorial code has poor API surfaces for additional development though, so I'm rewriting this tool to be usable as a library. I want to make it dead-simple to generate a new prototype app, optionally bring your own model, and calibrate the control scheme.
from rpi-object-tracking.
 Martin2kid
commented on June 29, 2024
Martin2kid
commented on June 29, 2024
Leigh,
Thank you much for input! I know my camera setup & orientation is exactly same with yours but about 3 to 8' distance.
I also suspect new Buster release may have something to do with this behavior (Your setup, I believe is started from pre-Buster 8-20-2020 release vs mine is Pi4 4GB with new Buster release)
I'll try with diffirent PID tinkering & hope that'll fix this behavior in my setup.
BTW; Your setup & servo movements are much smoother and predictably solid than Intels's NCS2 with OpenVINO + SSD model setup(Quite bit of jerks & sudden jolt of occasional movement--occasional jitter and PID setting always goes into oscillation eventually, no matter what value I change and still work in progress)
Your work is superior & solid!!!
LMK, if you want to try Pablo's FOC (Dual Brushless motor FOC controller for closed loop position control--I ordered 2 and I have 1 extra for you to experiment with and share with us if you like to, I can also order 2 motor with encoder plus build a pan & tilt frame for you.
I believe, You can do bunch of cool control with it, dynamic PID setup, almost realtime tracking!
from rpi-object-tracking.
Related Issues (20)
- Custom model integration HOT 3
- Searching with "track" command HOT 16
- can i see the test camera on the rasp pi screen?, if not connect the hdmi monitor HOT 1
- Setting default servo positions in track mode from PID controller HOT 6
- Custom object detection implementation HOT 2
- PID controller improvements HOT 6
- Pan & Tilt and Edge PTU error
- RuntimeError: HOT 30
- Multiple Issues ... HOT 2
- Where to change line_thickness. Seems to be defaulted to 4? HOT 3
- Failed to write byte Error HOT 2
- Realtime tracking by using FOC driven BLDC motor HOT 1
- rpi-deep-pantilt track face HOT 4
- stream the output to mjpegstreamer or similar? HOT 3
- Add SBUS support HOT 1
- rpi-deep-pantilt not working (instantly crashing) HOT 1
- Export detections (bounding-box coordinates, classfication...) for detection/tracking
- rpi-deep-pantilt track face
- tracking problem
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from rpi-object-tracking.