Comments (9)
 guofei9987
commented on May 15, 2024
guofei9987
commented on May 15, 2024
Yes, it can do, but with a little complex, because I didn't attempt to cover CVRP.
As an example, we want to minimize the total distance, with max capacity.
Define the problem
import numpy as np
from scipy import spatial
import matplotlib.pyplot as plt
num_customers = 15
num_vehicle = 5
num_points = 1 + num_customers
max_capacity = 5
customers_coordinate = np.random.rand(num_points, 2) # generate coordinate of points
depot_coordinate = np.array([[0.5, 0.5]])
points_coordinate = np.concatenate([depot_coordinate, customers_coordinate], axis=0)
distance_matrix = spatial.distance.cdist(points_coordinate, points_coordinate, metric='euclidean')
def cal_total_distance(routine):
'''The objective function. input routine, return total distance.
cal_total_distance(np.arange(num_points))
'''
num_points, = routine.shape
return distance_matrix[0, routine[0]] \
+ sum([distance_matrix[routine[i % num_points], routine[(i + 1) % num_points]] for i in range(num_points)]) \
+ distance_matrix[routine[-1], 0]
def constraint_capacity(routine):
capacity = 0
c = 0
for i in routine:
if i != 0:
c += 1
else:
capacity = max(capacity, c + 1)
c = 0
capacity = max(capacity, c + 1)
return capacity - max_capacity
Run GA
from sko.GA import GA_TSP
ga_tsp = GA_TSP(func=cal_total_distance, n_dim=num_points, size_pop=50, max_iter=500, prob_mut=1, )
ga_tsp.Chrom = np.concatenate([np.zeros(shape=(ga_tsp.size_pop, num_vehicle - 1), dtype=np.int), ga_tsp.Chrom], axis=1)
ga_tsp.has_constraint = True
ga_tsp.constraint_ueq = [constraint_capacity]
best_points, best_distance = ga_tsp.run()
Plot
fig, ax = plt.subplots(1, 2)
best_points_ = np.concatenate([[0], best_points, [0]])
best_points_coordinate = points_coordinate[best_points_, :]
ax[0].plot(best_points_coordinate[:, 0], best_points_coordinate[:, 1], 'o-r')
ax[1].plot(ga_tsp.generation_best_Y)
plt.show()

Looking good
You may want to use constraint_eq and constraint_ueq to deal with time window or other constraint, see https://scikit-opt.github.io/scikit-opt/#/en/README?id=_1-differential-evolution
from scikit-opt.
 ameya1995
commented on May 15, 2024
ameya1995
commented on May 15, 2024
Thanks a lot!
from scikit-opt.
 morestart
commented on May 15, 2024
morestart
commented on May 15, 2024
@guofei9987 dalao能稍微解释一下def constraint_capacity(routine):这个函数吗,routine 传入的这个参数是什么?我没看懂这个不等式是怎么表达的。。。。
总距离矩阵为什么加上了distance_matrix[0, routine[0]]与distance_matrix[routine[-1], 0]?
from scikit-opt.
guofei9987
commented on May 15, 2024
@guofei9987 dalao能稍微解释一下
def constraint_capacity(routine):这个函数吗,routine 传入的这个参数是什么?我没看懂这个不等式是怎么表达的。。。。
总距离矩阵为什么加上了distance_matrix[0, routine[0]]与distance_matrix[routine[-1], 0]?
这是 vrp 问题,多辆货车去送货,constraint_capacity 计算的是每辆车的最大载重(约束为每次最多过max_capacity个点)。
cal_total_distance 这个函数是计算总路径,不过这个路径比较特殊,预先限定了多辆车,每辆车回到原点。
你的 #58 问题比这个问题简单很多,只需要改变一下目标函数 cal_total_distance ,只把中间n-2个点作为自变量即可。
from scikit-opt.
 CarlDegio
commented on May 15, 2024
CarlDegio
commented on May 15, 2024
ga_tsp.Chrom = np.concatenate([np.zeros(shape=(ga_tsp.size_pop, num_vehicle - 1), dtype=np.int), ga_tsp.Chrom], axis=1)
Maybe there are some mistakes?
New Chrom includes point zero 5 times (1 zero in original Chrom and 4 zeros in np.zeros).
However, there are 4 zeros at most excluding the starting and ending.
It seems that this doesn't change the result. Adding 4 or 6 np.zeros will only add something like [0 0 0] to best_points.
from scikit-opt.
guofei9987
commented on May 15, 2024
ga_tsp.Chrom = np.concatenate([np.zeros(shape=(ga_tsp.size_pop, num_vehicle - 1), dtype=np.int), ga_tsp.Chrom], axis=1)Maybe there are some mistakes?
New Chrom includes point zero 5 times (1 zero in original Chrom and 4 zeros in np.zeros).
However, there are 4 zeros at most excluding the starting and ending.
It seems that this doesn't change the result. Adding 4 or 6 np.zeros will only add something like [0 0 0] to best_points.
Thanks for pointing out the mistake. I wrote this code in too hurriedly to check again.
(Besides, the parameter was not good, either)
import numpy as np
from scipy import spatial
import matplotlib.pyplot as plt
num_customers = 17
num_vehicle = 5
num_points = 1 + num_customers
max_capacity = 5
customers_coordinate = np.random.rand(num_points, 2) # generate coordinate of points
depot_coordinate = np.array([[0.5, 0.5]])
points_coordinate = np.concatenate([depot_coordinate, customers_coordinate], axis=0)
distance_matrix = spatial.distance.cdist(points_coordinate, points_coordinate, metric='euclidean')
def cal_total_distance(routine):
'''The objective function. input routine, return total distance.
cal_total_distance(np.arange(num_points))
'''
num_points, = routine.shape
return distance_matrix[0, routine[0]] \
+ sum([distance_matrix[routine[i % num_points], routine[(i + 1) % num_points]] for i in range(num_points)]) \
+ distance_matrix[routine[-1], 0]
def constraint_capacity(routine):
capacity = 0
c = 0
for i in routine:
if i != 0:
c += 1
else:
capacity = max(capacity, c + 1)
c = 0
capacity = max(capacity, c + 1)
return capacity - max_capacityLet the index of customers range from 1 to num_customers, and add num_vehicle - 1 zeros in the middle. We already hav start point and end point in function constraint_capacity.
from sko.GA import GA_TSP
ga_tsp = GA_TSP(func=cal_total_distance, n_dim=num_customers, size_pop=50, max_iter=500, prob_mut=1, )
ga_tsp.Chrom = np.concatenate([np.zeros(shape=(ga_tsp.size_pop, num_vehicle - 1), dtype=np.int), ga_tsp.Chrom+1], axis=1)
ga_tsp.has_constraint = True
ga_tsp.constraint_ueq = [constraint_capacity]
best_points, best_distance = ga_tsp.run()Plot it
fig, ax = plt.subplots(1, 2)
best_points_ = np.concatenate([[0], best_points, [0]])
best_points_coordinate = points_coordinate[best_points_, :]
ax[0].plot(best_points_coordinate[:, 0], best_points_coordinate[:, 1], 'o-r')
ax[1].plot(ga_tsp.generation_best_Y)
plt.show()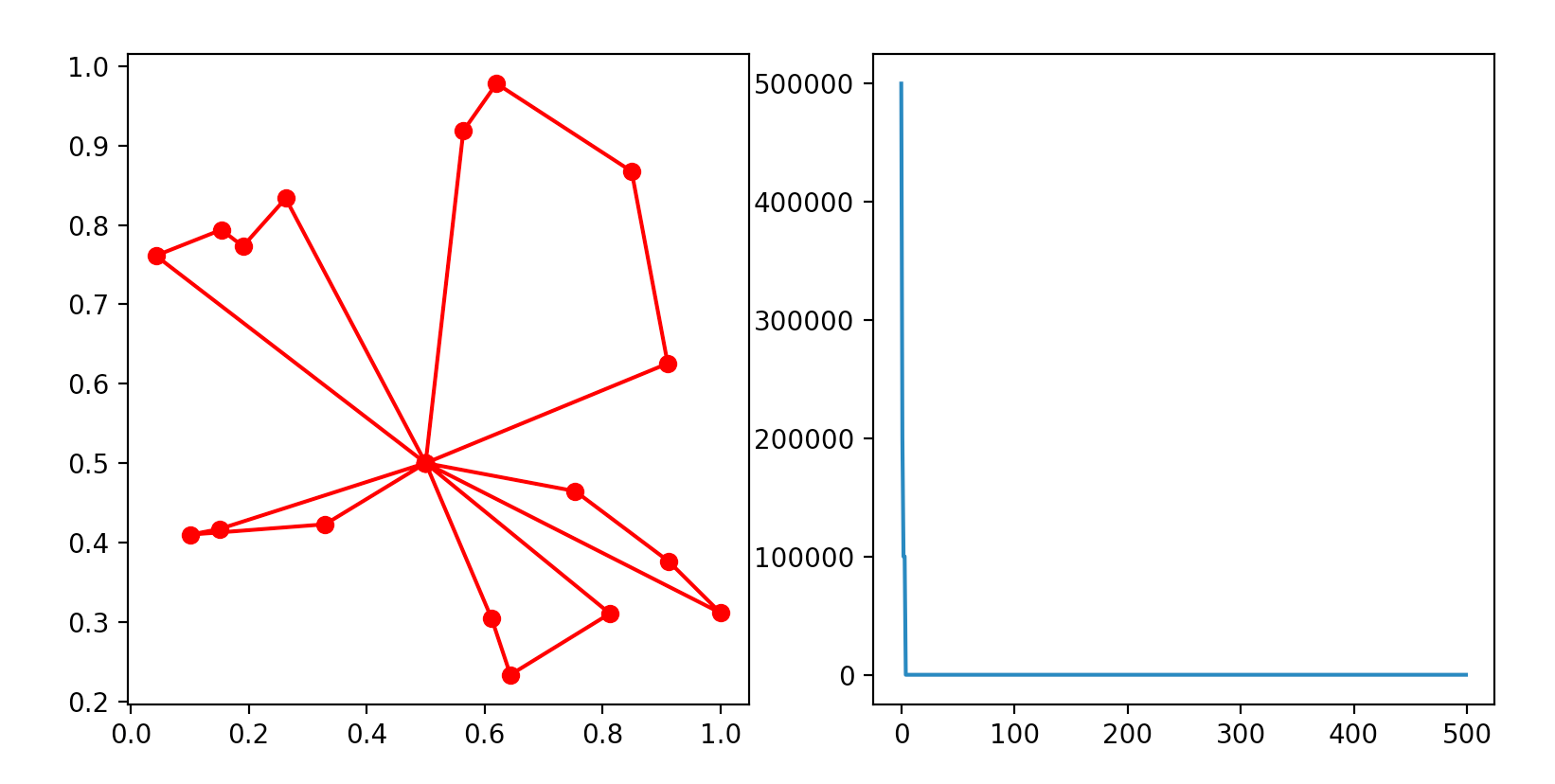
This code seems to be terrible to read. I will work out another one later.
from scikit-opt.
 Thilini417
commented on May 15, 2024
Thilini417
commented on May 15, 2024
how can I change this vrp code to simulates annealing and ant colony optimization?
from scikit-opt.
guofei9987
commented on May 15, 2024
how can I change this vrp code to simulates annealing and ant colony optimization?
Reuse the objective function, some changes might be needed.
from scikit-opt.
 aak1247
commented on May 15, 2024
aak1247
commented on May 15, 2024
sa用法一样嘛?
from scikit-opt.
Related Issues (20)
- crossover.py文件中crossover_2point_bit算子起作用吗
- How to change crossover rate? HOT 1
- 请问GA在做整数规划的时候怎么设置才能保证每次n个变量间不重复 HOT 1
- Allow users to set number of process pool workers/threads
- 如何在初始化阶段将表现良好的个体加入种群?
- 规定GA起始点
- 约束条件不生效
- 请教多进程模式下,如何释放占用内存 HOT 3
- ACA算法发生除0问题
- 请问模拟退火算法出自于哪里?
- 希望增加进度条
- 如何设置遗传算法优化函数最大化?提供的一些demo都是目标函数最小化问题求解
- 请问,如何解决一个简单的VRP问题?
- 如何用已知的较好参数初始化种群 HOT 2
- 默认优化目标最大还是最小
- solve the problem that use grid route
- 计算加速
- 非优化参数的传入 HOT 2
- BUG: array shape mismatch between Y and pbest_y in PSO, error raised in update_pbest HOT 1
- 请问约束等式或约束不等式支持向量化形式的约束吗?
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from scikit-opt.