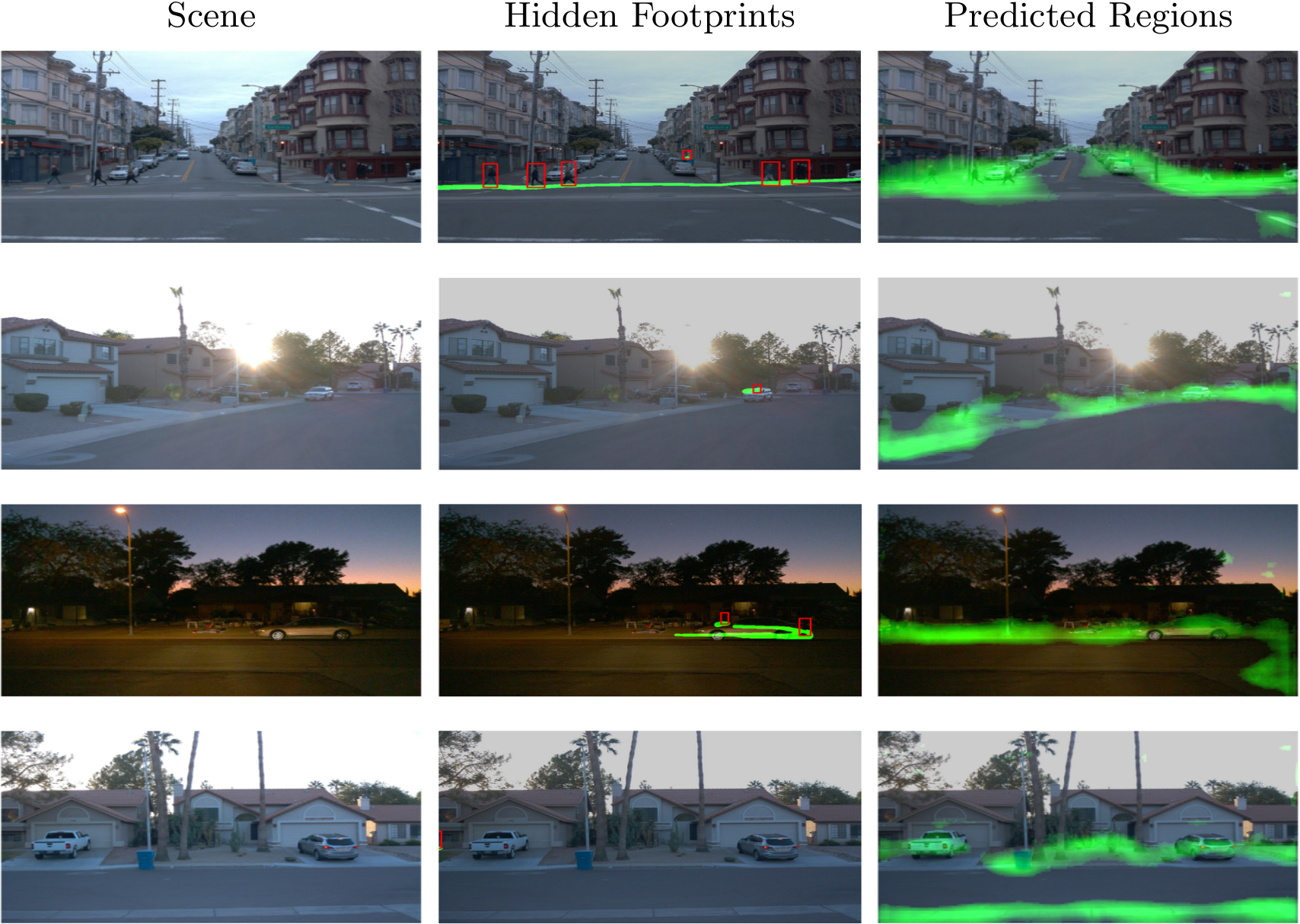
Hidden Footprints: Learning Contextual Walkability from 3D Human Trails
Jin Sun, Hadar Averbuch-Elor, Qianqian Wang, and Noah Snavely
European Conference on Computer Vision (ECCV) 2020
This repository contains code for hidden footprints propagation on Waymo data, as described in the paper. In addition, we provide a pretrained model to predict walkability on street scenes.
- Waymo Open Dataset code base.
- Tensorflow for reading Waymo data.
- PyTorch for running pretrained models.
- OpenCV for image handling.
- Numpy.
First download Waymo data to your local directory. Extract the zip files to get *.tfrecord files.
Open demo.ipynb for an example on how to:
- Load Waymo record file for images, labels, and camera parameters;
- Propagate hidden foorptins from all frames in a sequence (segment) to a reference frame;
- Run a pretrained walkability prediction model on the reference frame image.
Pretrained model can be downloaded from Google Drive here. Put it in the root directory.
This repository is released under the Apache 2.0 license.
@InProceedings{hiddenfootprints2020eccv,
title={Hidden Footprints: Learning Contextual Walkability from 3D Human Trails},
author={Jin Sun and Hadar Averbuch-Elor and Qianqian Wang and Noah Snavely},
booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
month={August},
year={2020}
}






