Key novelties
[27.06.2017] Simulated annealing:
User has two options - focal length is known or random at the beginning (control variables are set in Reconstructor::init()). In the second case, user has to specify range of focal length - there is no need to specify exact value of the focal length - algorithm is parameter-less in this case (quality is a little bit worse, but it's still parameter-less). In both cases there was implemented additional optimisation step of focal length using heuristic method - Simulated Annealing. From now on focal length is adjusted using randomly-picked values in adjustable manner, not just changed arbitrarly according to displacement of points during reprojection as it was before.
[19.06.2017] Focal adjustment:
I presented novelty in adapted 3D reconstruction algorithm (EPFL). There are algorithms that optimise extrinsic camera parameters, but - in the knowledge of authors - noone tried to estimate the intrinsic parameters. In unconstrained reconstruction step I track displacement of reprojected points in each iteration. If the displacement in two successive iterations shows that the point is closer to the middle of the image - I assume that focal length is a little bit too long (somehow the distance from camera is expressed as a function of focal length). For better reprojection in next iteration I adjust the focal length and make it smaller. Otherwise, this parameter is enlarged.
[23.05.2017] Simulated local deformation:
Descriptor robust to out-of-plane rotations by performing similar approach as in ASIFT article - simulated local deformation. I used OpenCV implementation of SIFT. How does it work:
- find keypoints and descriptors on reference frame
- simulated local deformation - add a stack of descriptors for each keypoint using perspective transformations (that is why we need chessboard files under variety of rotations).
- detect and describe keypoints on test frame
- perform matching descriptors from test frame with stac of descriptors from reference image - improved matching process
- profit
Used ideas
Robust to in-plane rotation algorithm (ASIFT):
http://www.cmap.polytechnique.fr/~yu/research/ASIFT/demo.html
Adapted 3D reconstruction algorithm:
http://cvlab.epfl.ch/files/content/sites/cvlab2/files/publications/publications/2012/OstlundVF12.pdf
HOWTO
Build:
- build using standard procedure (mkdir build -> cd build -> cmake .. -> make)
- in build create chessboard.txt file where are listed all images needed for simulated local deformation. If the size of chessboard patter is other than 9x6, change it in void KpMatcher::findCorners.
- Paste to build folder all files from dataset (EPFL): cam.ext, cam.intr, cam.tdir, ControlPointIds.txt, im_corners.txt, mesh.pts, mesh.tri, webcam.intr, world_corners.txt
- Usage: ./affineDSC path_to_model.png path_to_frame.png detector descriptor ratio1% ratio2% isPointCloudSaved(0 / 1)
Results - simulated local deformation
SIFT was used for evaluation purposes:
-
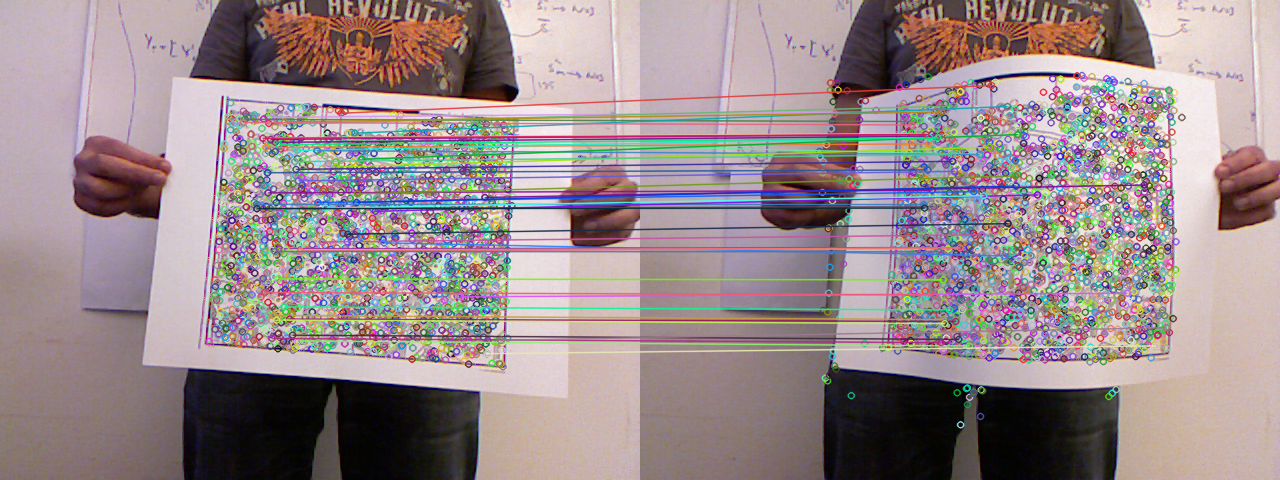
All matches found:
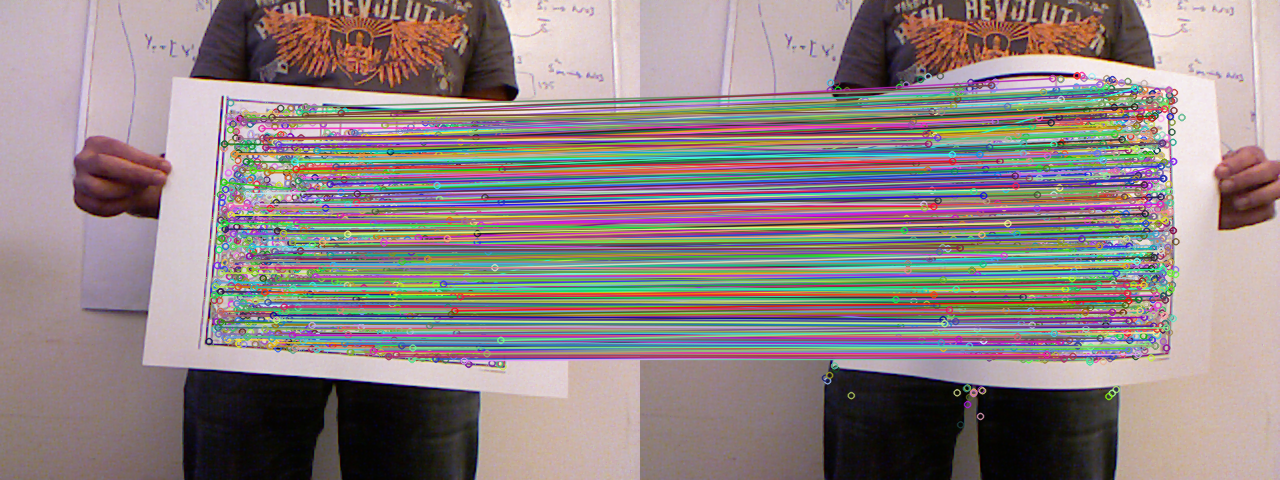
-
Displacement of added keypoints:
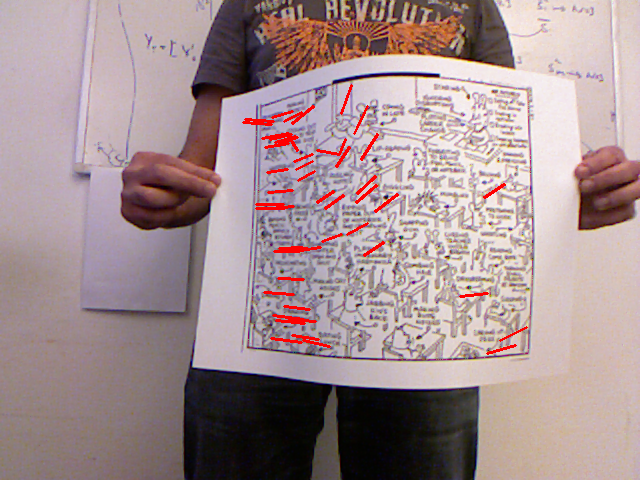
-
Position of added keypoints:
Milestones:
- [09.03.17] Adapted EPFL code for my own purposes.
- [23.05.17] Simulated local deformation - stable version.
- [19.06.17] Focal adjustment added + few minor improvements.
- [27.06.17] Focal adjustment using Simulated Annealing algorithm.
- [05.07.17] Code refactoring.

