The motion following demo uses openpose which is available as a ROS package.
| Reference : openpose
| Reference : openpose_ros
As the openpose is based on machine learning algorithm, additional PC with nVidia GPU will be required in order to process the algorithm for ROBOTIS-OP3.
Please refer to below configuration for the motion following demo.
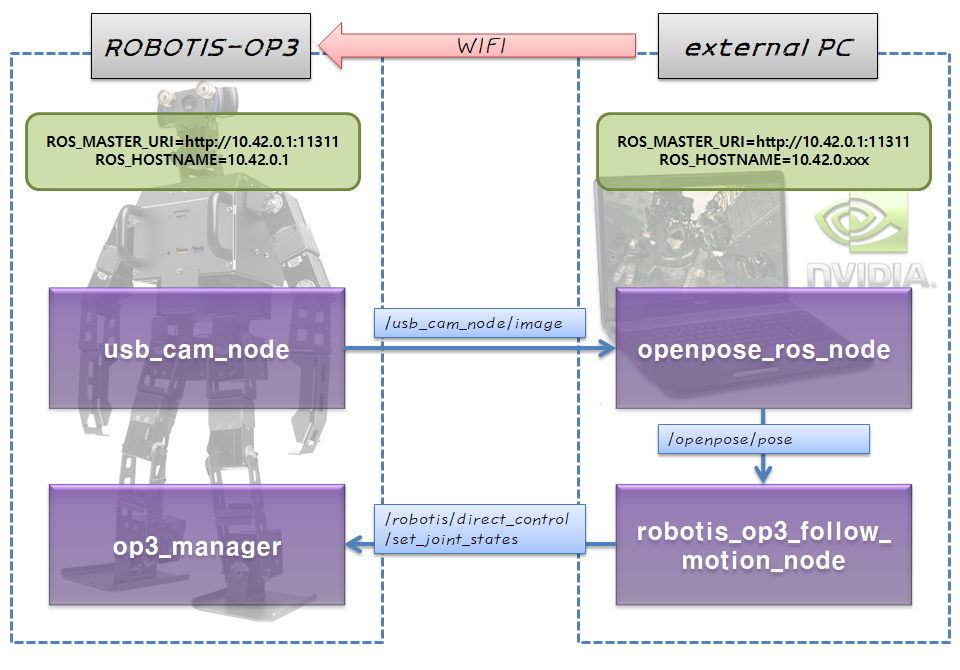
This demo will manipulate arm roll and elbow joint in order to imitate the skeleton recognized via camera.
- How to set
-
network
Connect ROBOTIS-OP3 wifi hotspot from an external PC
Configure ROS network in the external PC(ROS_MASTER_URI=http://10.42.0.1:11411) -
timing
| Reference : ROS Timing issue
- How to install
-
ROBOTIS-OP3
Update to the latest source code for ROBOTIS-GIT/ROBOTIS-OP3(direct_control_module is required) -
external PC
-
Install openpose_ros
It's modified since original source code does not present skeleton image. -
Install robotis_op3_following_motion
$ cd ~/catkin_ws/src $ git clone https://github.com/Seri-Lee/robotis_op3_following_motion.git $ cd ~/catkin_ws $ catkin_make
- Run op3_manager in ROBOTIS-OP3
$ roslaunch op3_manager op3_manager.launch
- Run usb_cam_node in ROBOTIS-OP3
$ roslaunch ball_detector ball_detector_from_usb_cam.launch
- Run openpose_ros_node and robotis_op3_following_motion_node in external PC
$ roslaunch robotis_op3_following_motion openpose_op3.launch
Control with buttons on the back
- mode button : Init pose for demo and start the Motion Following demo
- start button : Pause demo / Resume Demo
- user button : Stop Demo and return to ROBOTIS-OP3 init pose.

