Comments (20)
 oceanjules
commented on May 12, 2024
1
oceanjules
commented on May 12, 2024
1
Hi Patrik,
I'm also using Turtlebot3 with ROS, so perhaps I can help. So suppose you have teleop running - that will be in one terminal. Open another terminal (or a tab within your terminal with Ctrl+Shift+T) and type rostopic list. You'll see all the topics that are being published/subscribed to. If you don't know about topics, read here http://wiki.ros.org/Topics. In the list, there should be one topic called /scan. This is how you make Turtlebot3 use lidar data by subscribing to it and reading the messages that are published there. To see what kind of messages are used on that topic type rostopic info /scan and it will say sensor_msgs/LaserScan. Now what on earth is that? Type rosmsg show sensor_msgs/LaserScan and you'll see the structure of the message. The array of ranges is what you are after. Final part, to actually see what's happening on that topic type rostopic echo /scan. That will give you a gazillion messages per second, so you won't be able to analyse them on the go. You are better off stopping this by Ctrl+C and going up, looking for the word ranges and seeing the values. It will be an array of 360 values (one for each degree) and it will contain values in meters for what the lidar thinks is ahead of the Turtlebot.
from turtlebot3.
 routiful
commented on May 12, 2024
routiful
commented on May 12, 2024
Hello @patrick95470 :) Happy new year!!
Did you check '/scan' topic message? It will be help you to watch the invalid data in detailed
Thanks
Darby
from turtlebot3.
 patrick95470
commented on May 12, 2024
patrick95470
commented on May 12, 2024
Hi Darby,
Many thx for your swift reply, but could you please be more specific in what I have to do ?.. ;-)
Regards
Patrick
from turtlebot3.
routiful
commented on May 12, 2024
I mean check a scan data using topic message. /scan shows range(distance) center of sensor to object.
You can check it using 'rqt'
Thanks
Darby
from turtlebot3.
patrick95470
commented on May 12, 2024
Hi Darby
I have to say that my skill is not enough high to see exactly what I have to do, I have installed rqt, I hope it has been done correctly, ( how to check??)
but afterward, I'm puzzled in the way to do checking you suggest me
Would it be possible to write shortly the commands I have to use..;
thx
Kind regards
Patrick
from turtlebot3.
patrick95470
commented on May 12, 2024
HI PandaJules
I will follow carefully what you advised me and let you know
Did you get the same concern with your TB3?
In fact I can teleop run it without problem, the TB3 moves in the right direction but the position in RVIZ is not correct, there is a shift between the reality and the points of the lidar's representation
Kind regards
PAtrick
from turtlebot3.
oceanjules
commented on May 12, 2024
One thing you need to remember is that lidar has minimum and maximum range which I think are 0.12 and 3.5 meters. So, for example if you come to a wall very close, you can get this weird discontinuity.
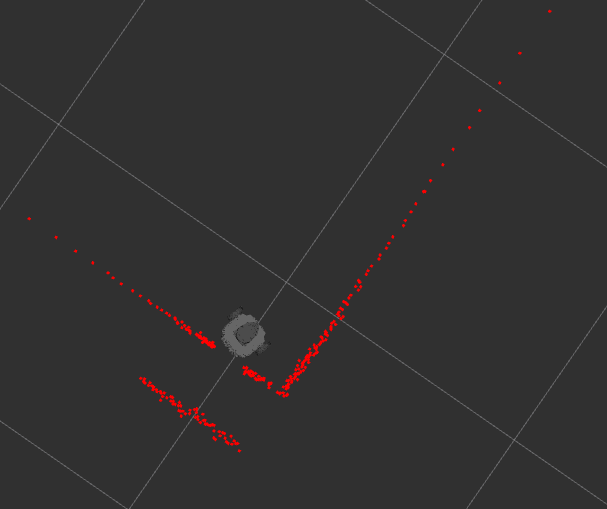
If the walls are circular, then maybe the ray didn't come back to the lidar, so it thinks there is nothing. I attach 2 screenshots of the cloud point that I usually see. I don't use RViz very often, to be honest.

from turtlebot3.
patrick95470
commented on May 12, 2024
HI
in fact I have the clouds points but the orientation of the walls does not stick with the position of TB3 on RVIZ and the reality
I will copy/past a screenshot tomorrow to explain my words
kind regards
from turtlebot3.
patrick95470
commented on May 12, 2024
Hi
The TB3 is a middle of the room, but this is what I get ib RVIZ

in the fact the TB3 is not well positioned in relation to its real environment in RVIZ
kind regards
from turtlebot3.
patrick95470
commented on May 12, 2024
My TB3 in RVIZ is not well positioned on the Y axes
If somebody can tell me how to fix this issue it would be great
from turtlebot3.
oceanjules
commented on May 12, 2024
Is the "rainbow line" following a wall? What I mean is - are the points mostly correct, but you are unsure about those points in the middle of nowhere? It might be noise or you have shiny objects that react weirdly with the rays. Try positioning the turtlebot in a place with good vertical walls that make up a square a see what RVIZ thinks
from turtlebot3.
patrick95470
commented on May 12, 2024
The Lidar is working properly, the walls are well defined
but my concern is that in RVIZ the TB3 is not at the position where it should be, in my screen copy, the TB3 is far away of the wall, but in RVIZ it seems to touch the wall....
from turtlebot3.
routiful
commented on May 12, 2024
How do you open Rviz?
Did you follow this tutorial?
from turtlebot3.
patrick95470
commented on May 12, 2024
Hi
I did it, but I have a doubt concerning the commands, I just typed :
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
What about :
$ roslaunch turtlebot3_bringup turtlebot3_lidar.launch
$ roslaunch turtlebot3_bringup turtlebot3_core.launch
should I type them too ?
from turtlebot3.
routiful
commented on May 12, 2024
No, turtlebot3_robot.launch includes lidar and core file.
from turtlebot3.
patrick95470
commented on May 12, 2024
hummm, so I'm doing exactly what we have in the tutorial ....
As I wrote, I can teleoperate the TB3 without problem, it is just the positioning into RVIZ which is not correct, there is a shift , the TB3 is not moving is the right direction ,
We have all the wall clearly visible in RVIZ, but if I move it for instance right away out of the wall, in RVIZ we see the TB3 moving toward to the wall.. :-(
from turtlebot3.
 jhausladen
commented on May 12, 2024
jhausladen
commented on May 12, 2024
Hi,
we think we have a similar problem with our TurtleBot3. Generally, driving in teleop mode works fine. Also the lidar seems to work properly when creating maps using the SLAM tutorial.
However when we try to navigate on the map, the robot just spins in a circle.
First the robot was positioned somewhere on the map:

When pressing the "2D Pose Estimate" button, TurtleBot3 finds the right position in the room and highlights the walls correctly:

But when we try to navigate somewhere on the map, it just begins to spin around and location information in RViz is displaced.

According to the tf error shown in RViz, we checked the time on both machines but it was synced correctly.
from turtlebot3.
patrick95470
commented on May 12, 2024
Hi
I would say that I’m not feeling alone right now, but the question is how to fix this issue
If somebody could help us it would be great
from turtlebot3.
jhausladen
commented on May 12, 2024
Yesterday we also set up our waffle with a Raspberry Pi instead of the Intel Joule and suddenly navigation worked. Walls are now mapped correctly in RViz and TurtleBot3 doesn’t spin as hell as before. In our case it seems that the Intel Joule Ubuntu Distro, or especially some of the ROS packages cause that issue.
from turtlebot3.
patrick95470
commented on May 12, 2024
Hey
thx for this important information, indeed I guess that many update fixes had been done, now works :-)
from turtlebot3.
Related Issues (20)
- ROS2 Humble Setup Issue HOT 2
- OpenCR USER1 LED - Cannot used /cmd_vel HOT 1
- `static_transform` between `base_link` and `camera`
- How to give initial guess to /diff_drive_controller/odom
- empty topic list
- Exploration Error while using Cartographer for Localization
- failed bringup Turtlebot3 OpenManipulator
- Addition of xacro argument for odometryFrame and robotBaseFrame within diff_drive plugin
- No reading from IR and bumper sensors HOT 1
- Failed Bringup
- Open-manipulator X Simulation Issue HOT 1
- Faulty Odometry - The pose values published at startup are extremely large.
- Error building turbot3_gaebo on ROS2 Humble
- Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
- Inquiry Regarding Turtlebot3 Odometry
- How to launch multiple ROS2 turtlebot3 in real world
- [ERROR] [1701002915.419852707]: Map_server could not open ~/map.yaml.
- Turtlebot3 Waffle Pi4: Teleop (with RC100B and keyboard) not working after Bringup HOT 3
- Need LDS_01 lidars config file(.lua file)
- Turtlebot3 and Remote PC connection problem (only topics present are /parameter_events and /rosout) HOT 2
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from turtlebot3.