xxorde / librekinect Goto Github PK
View Code? Open in Web Editor NEWDepth data from a kinect sensor! Small and fast kernel driver. Also for embedded devices like the raspberry pi!
Depth data from a kinect sensor! Small and fast kernel driver. Also for embedded devices like the raspberry pi!




















































































































































Hi,
Make_load is not working because of missing gspca.ko file. So, may be, make command is not working properly (thats why gspca.ko is not present ). I have already done changes in Makefile for raspberry pi 2 as mentioned in #15 and bug correction as in #14 . But I dont know the way to fix this problem.
Here are the outputs -
make
pi@raspberrypi ~/librekinect $ sudo make
make pc
make[1]: Entering directory '/home/pi/librekinect'
make -C /lib/modules/3.18.11-v7/build M= modules
make[2]: Entering directory '/usr/src/linux'
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[3]: 'include/generated/mach-types.h' is up to date.
CALL scripts/checksyscalls.sh
Building modules, stage 2.
MODPOST 1361 modules
make[2]: Leaving directory '/usr/src/linux'
make[1]: Leaving directory '/home/pi/librekinect'make load
pi@raspberrypi ~/librekinect $ sudo make load
make unload_drivers
make[1]: Entering directory '/home/pi/librekinect'
sudo sh unload_drivers.sh
tried to unload all related drivers (and possibly more ;)
make[1]: Leaving directory '/home/pi/librekinect'
sudo modprobe videodev
sudo insmod gspca.ko
Error: could not load module gspca.ko: No such file or directory
Makefile:42: recipe for target 'load' failed
make: *** [load] Error 1file system after make load
pi@raspberrypi ~/librekinect $ ls
gspca.c gspca.h kinect.c Makefile readme.md unload_drivers.sh
pi@raspberrypi ~/librekinect $ What could be the problem ?
EDIT1 : I think the problem is that M= is not set in this line in output of Make command - Make -C /lib/modules/3.18.11-v7/build M= modules . How could I solve it ?
EDIT2 : I solved the problem by putting fixed path instead of pwd in Makefile. Still, If someone knows the cause of pwd not working, please share it with me.
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
- - - - >
$(MAKE) -C $(KERNELDIR) M=/home/pi/librekinect modules
Thanks
If I read the instructions correctly, the line:
"After loading the modules you should have a new "/dev/videoX" which you can use like a web cam."
means that following the structions should CREATE the /dev/videox link/file, correct?
I've followed everything up to here fine (besides commenting out the previous issue in the gspca.c file), and I have no /dev/video anything.
'make load' works up to the point of chowning the /dev/video* bit, because it doesn't exist (doing every line individually up to that point is fine)
Are there any other kernel modules that need to be set/modprobed to get this link? Or any other packages that need to be apt-gotten?
grep -i v4l2 /usr/src/linux/.config gives me:
'# Config_video_v4l2_subdev_api is not set
Config_Video_V4l2=m
Config_Video_AU0828_V4l2=y
Config_Video_EM28xx_V4l2=m
Config_Video_Platform_Drivers=y
'# Config_V4l_Mem2mem_Drivers is not set
'# Config_V4l_Test_Drivers is not set
Config_DVB_AU8522_V4l=m
(nb, # gives me huge fonts, hence the '# in the commented out bits)
I've modify the source according #36 , #15 ,etc. And build the *.ko successfully.
However when insmod , I get the err:
insmod: ERROR: could not insert module gspca.ko: Invalid module format
if anyone build and run well on RP3 , please do not be shy to let me konw.
my env is :
Linux raspberrypi 4.4.13-v7 #1 SMP Sat Jun 18 06:24:07 UTC 2016 armv7l GNU/Linux
here is the part log, the full log: -> gist
root@raspberrypi:~/Desktop/librekinect# make
make -C /lib/modules/4.4.13-v7/build M=/root/Desktop/librekinect modules
make[1]: Entering directory '/usr/src/linux'
CC [M] /root/Desktop/librekinect/gspca.o
CC [M] /root/Desktop/librekinect/kinect.o
Building modules, stage 2.
MODPOST 2 modules
CC /root/Desktop/librekinect/gspca.mod.o
LD [M] /root/Desktop/librekinect/gspca.ko
CC /root/Desktop/librekinect/kinect.mod.o
LD [M] /root/Desktop/librekinect/kinect.ko
make[1]: Leaving directory '/usr/src/linux'
root@raspberrypi:~/Desktop/librekinect# make load
make unload_drivers
make[1]: Entering directory '/root/Desktop/librekinect'
sudo sh unload_drivers.sh
tried to unload all related drivers (and possibly more ;)
make[1]: Leaving directory '/root/Desktop/librekinect'
sudo modprobe videodev
sudo insmod gspca.ko
insmod: ERROR: could not insert module gspca.ko: Invalid module format
Makefile:38: recipe for target 'load' failed
make: *** [load] Error 1
root@raspberrypi:~/Desktop/librekinect# uname -a
Linux raspberrypi 4.4.13-v7 #1 SMP Sat Jun 18 06:24:07 UTC 2016 armv7l GNU/Linux
root@raspberrypi:~/Desktop/librekinect# modprobe gspca_main
root@raspberrypi:~/Desktop/librekinect# modprobe gspca_kinect
root@raspberrypi:~/Desktop/librekinect# insmod gspca.ko
insmod: ERROR: could not insert module gspca.ko: Invalid module format
root@raspberrypi:~/Desktop/librekinect# insmod kinect.ko
insmod: ERROR: could not insert module kinect.ko: Invalid parameters
root@raspberrypi:~/Desktop/librekinect# insmod gspca.ko depth_mode=1
insmod: ERROR: could not insert module gspca.ko: Invalid module format
root@raspberrypi:~/Desktop/librekinect#
[ 988.544875] gspca_main: kinect-2.14.0 probing 045e:02ae
[ 988.546176] usbcore: registered new interface driver kinect
[ 1000.409075] gspca: exports duplicate symbol gspca_debug (owned by gspca_main)
[ 1008.185163] kinect: disagrees about version of symbol gspca_frame_add
[ 1008.185190] kinect: Unknown symbol gspca_frame_add (err -22)
[ 1008.185262] kinect: disagrees about version of symbol gspca_dev_probe
[ 1008.185273] kinect: Unknown symbol gspca_dev_probe (err -22)
Hi, I don't know much about kernels, but is there some way to have a precompile kernel for the raspberry pi with librekinect already installed? Maybe a modified raspbian image?
Another question, I haven't tested it yet, but if it's working why isn't this shipped with the default raspbian kernels?
V4L2_FL_USE_FH_PRIO is not a known symbol anymore, commenting out line 2070 fixed it for me. https://github.com/xxorde/librekinect/blob/master/gspca.c#L2070
I'm on a Raspberry Pi 2 with Linux 3.18.5-v7
Hi.
This is not so much an issue as a question:
I have successfully gotten librekinect working on the Raspberry Pi (version B). Aside from still having issues at initialization, which I will investigate later its working (e.g. I have to reload the driver a couplte of times and disconnect/reconnect the Kinect), it working and that is awesome!
So first of all: A HUGE thanks for your work!!!
I am currently trying out Python-OpenCV for development. The issue I am having is that when I read from the Kinect under /dev/video0 using the code shown below below, I only get an 8bit image. From what I could gather using Google this is expected, since OpenCV will not get more bit-depth from webcams. This results in very poor precision on the depth-position.
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
while(True):
ret, frame = cap.read()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
cv2.imshow('frame',gray)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
From what I could gather looking at the code of the driver it works with 10bit giving back the full bit-depth of the Kinects depth-image.
Is this Correct?
If so my question is how I can read it at that precision and idealy get it into a Python Numpy array for further processing(?).
BTW: I have found this link: http://www.jayrambhia.com/blog/capture-v4l2/, where it is explained how to use V4L2 in C to capture images from a video-device and it seems that there you can set the bit-depth (if I understand the code correctly - I didn't try it). But I do not know how I would do/integrate this from Python.
Any help is greatly appreciated!
Hi,
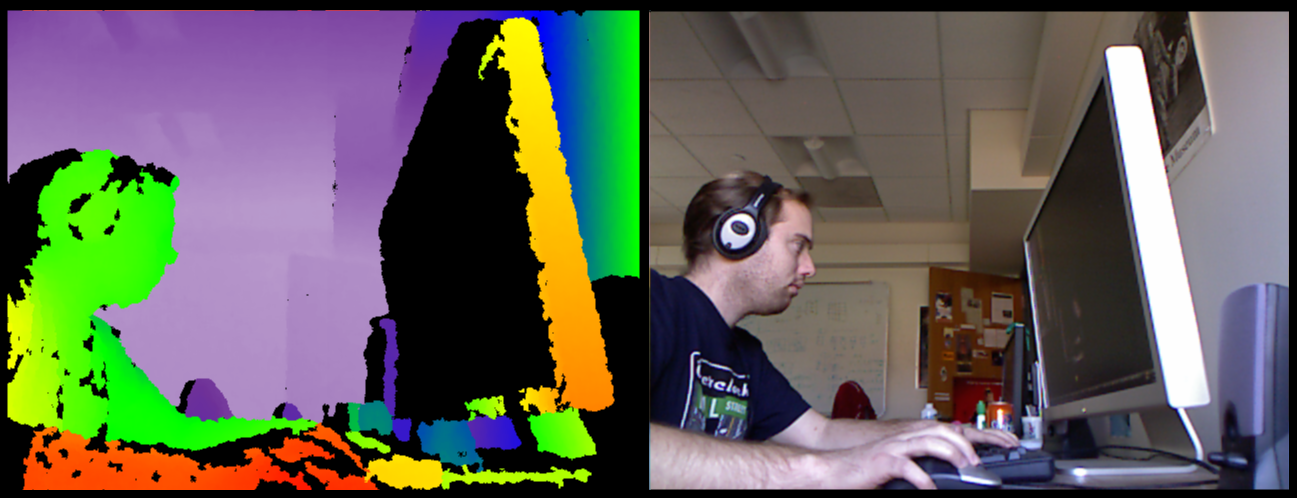
Can anyone please post his/her own depth image for comparision with my depth image?
My depth image is similar to the one I got from libfreenect (libfreenect was working but with dropped packets). Thats why, I think the packets are still being dropped inspite of using librekinect in my case.
I might be doing something wrong. Can you please tell me whats wrong?
My depth image from librekinect -

My depth image from libfreenect -

What could be the reason for this?
@robertheinze @lucyking @sjobeek Can you please help me by posting your own depth image for comparision with my depth image?
Thanks
It's a consistent problem and I'm not sure what I'm missing
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[1]: 'include/generated/mach-types.h' is up to date.
CALL scripts/checksyscalls.sh
CHK include/generated/compile.h
CHK kernel/config_data.h
CC drivers/cpufreq/bcm2835-cpufreq.o
drivers/cpufreq/bcm2835-cpufreq.c:29:23: fatal error: mach/vcio.h: No such file or directory
compilation terminated.
scripts/Makefile.build:308: recipe for target 'drivers/cpufreq/bcm2835-cpufreq.o' failed
make[2]: *** [drivers/cpufreq/bcm2835-cpufreq.o] Error 1
scripts/Makefile.build:455: recipe for target 'drivers/cpufreq' failed
make[1]: *** [drivers/cpufreq] Error 2
Makefile:797: recipe for target 'drivers' failed
make: *** [drivers] Error 2
currently doing this in sudo -s
and it's located in home/pi/linux
or ~/linux
Hi,
I am running:
Linux version 3.14.4-bone4.1 (papa@calvin2) (gcc version 4.8.3 20140401 (prerelease) (crosstool-NG linaro-1.13.1-4.8-2014.04 - Linaro GCC 4.8-2014.04) ) #1 SMP Sun Jun 8 15:16:41 EDT 2014
[ 0.000000] CPU: ARMv7 Processor [413fc082] revision 2 (ARMv7), cr=10c5387d
[ 0.000000] CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache
[ 0.000000] Machine model: TI AM335x BeagleBone
[ 0.000000] cma: CMA: reserved 16 MiB at 9e800000
[ 0.000000] Memory policy: Data cache writeback
[ 0.000000] On node 0 totalpages: 130816
[ 0.000000] free_area_init_node: node 0, pgdat c0ad1e80, node_mem_map dfaf2000
[ 0.000000] Normal zone: 1024 pages used for memmap
[ 0.000000] Normal zone: 0 pages reserved
[ 0.000000] Normal zone: 130816 pages, LIFO batch:31
[ 0.000000] CPU: All CPU(s) started in SVC mode.
[ 0.000000] AM335X ES2.1 (sgx neon )
from Robert C Nelson. And I compiled the librekinect as a module and I think is seems to have loaded in correctly because i see in dmesg:
[ 3.603352] usbcore: registered new interface driver kinect_depth
[ 3.622175] usb 2-1.1: new high-speed USB device number 4 using musb-hdrc
[ 3.723861] usb 2-1.1: device v045e p02ad is not supported
[ 3.729638] usb 2-1.1: New USB device found, idVendor=045e, idProduct=02ad
[ 3.729648] usb 2-1.1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[ 3.729657] usb 2-1.1: Product: Xbox Kinect Audio, \xffffffc2\xffffffa9\xffffffa9 2011 Microsoft Corporation. All rights reserved.
[ 3.729666] usb 2-1.1: Manufacturer: Microsoft
[ 3.729674] usb 2-1.1: SerialNumber: A44884X01190210A
[ 4.039768] omap_rtc 44e3e000.rtc: rtc core: registered 44e3e000.rtc as rtc0
[ 4.511987] random: nonblocking pool is initialized
[ 4.734481] omap-sham 53100000.sham: hw accel on OMAP rev 4.3
[ 4.934042] omap-aes 53500000.aes: OMAP AES hw accel rev: 3.2
[ 5.162182] usb 2-1.3: new high-speed USB device number 5 using musb-hdrc
[ 5.265488] usb 2-1.3: device v045e p02ae is not supported
[ 5.274579] usb 2-1.3: New USB device found, idVendor=045e, idProduct=02ae
[ 5.274593] usb 2-1.3: New USB device strings: Mfr=2, Product=1, SerialNumber=3
[ 5.274602] usb 2-1.3: Product: Xbox NUI Camera
[ 5.274610] usb 2-1.3: Manufacturer: Microsoft
[ 5.274618] usb 2-1.3: SerialNumber: A00363W01604210A
[ 5.305430] gspca: kinect_depth-2.14.0 probing 045e:02ae
[ 6.256680] net eth0: initializing cpsw version 1.12 (0)
[ 6.332402] net eth0: phy found : id is : 0x7c0f1
[ 6.332525] libphy: PHY 4a101000.mdio:01 not found
[ 6.337560] net eth0: phy 4a101000.mdio:01 not found on slave 1
and I see in /dev ===>
root@woofieone:/dev#
root@woofieone:/dev# ls -l /dev/video0
crw-rw---- 1 root video 81, 0 Jun 15 00:45 /dev/video0
So that looks good. If I just use:
cat /dev/video0
It thinks for a while then I get:
root@woofieone:/dev# time cat /dev/video0
cat: /dev/video0: No such device
real 0m5.381s
user 0m0.000s
sys 0m0.940s
root@woofieone:/dev#
So it is doing something I think. And in the DMESG I see:
[ 2245.353096] kinect_depth 2-1.3:1.0: urb status: -71
[ 2245.358099] gspca: usb_submit_urb() ret -19
[ 2248.233111] usb 2-1.3: new high-speed USB device number 7 using musb-hdrc
[ 2248.336423] usb 2-1.3: device v045e p02ae is not supported
[ 2248.342230] usb 2-1.3: New USB device found, idVendor=045e, idProduct=02ae
[ 2248.342265] usb 2-1.3: New USB device strings: Mfr=2, Product=1, SerialNumber=3
[ 2248.342293] usb 2-1.3: Product: Xbox NUI Camera
[ 2248.342320] usb 2-1.3: Manufacturer: Microsoft
[ 2248.342347] usb 2-1.3: SerialNumber: A00363W01604210A
[ 2248.349988] gspca: kinect_depth-2.14.0 probing 045e:02ae
[ 2256.986620] kinect: send_cmd: Bad tag 0004 != 0005
[ 2256.991791] kinect: send_cmd: Output control transfer failed (-71)
[ 2256.998482] kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.003498] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.012346] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.021223] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.030098] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.038971] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.047848] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.056734] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.065614] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.074484] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
[ 2257.083383] kinect_depth 2-1.3:1.0: urb status: -71kinect_depth 2-1.3:1.0: urb status: -71
So my questions are:
would cat /dev/video0 work? I.E. I would get some junk on the screen. Right now I see nothing ....
Do I need to write a small C code to read /dev/video0. If so do you have an example one handy? All I need is to read and dump to a file. One frame would do. The main thing is what is the correct buffer size to use in bytes? Is it with header or without header? I.E. should I use 422400 bytes for 11 bits?
I tried to change to 11 bits instead of 10 bits so .... in kinect.c
/* Depth Stream Format 0x03: 11 bit stream | 0x02: 10 bit */
//write_register(gspca_dev, 0x12, 0x02);
write_register(gspca_dev, 0x12, 0x03);
and also:
static const struct v4l2_pix_format video_camera_mode[] = {
{640, 480, V4L2_PIX_FMT_Y10BPACK, V4L2_FIELD_NONE,
.bytesperline = 640 * 11 / 8,
.sizeimage = 640 * 480 * 11 / 8,
.colorspace = V4L2_COLORSPACE_SRGB,
.priv = MODE_640x480 | FORMAT_Y10B | FPS_HIGH},
};
I kept FORMAT_Y10B and V4L2_PIX_FMT_Y10BPACK the same, mainly because I could not see a 11 bit format that seemed to fit. Is this correct? All I think I did was change the buffer size in bytesperline and sizeimage. Do you have a code snipper Alexander that I should put here?
The other bit of info I have is:
oot@woofieone:/dev# lsusb
Bus 002 Device 008: ID 045e:02ae Microsoft Corp. Xbox NUI Camera
Bus 002 Device 003: ID 045e:02b0 Microsoft Corp. Xbox NUI Motor
Bus 002 Device 004: ID 045e:02ad Microsoft Corp. Xbox NUI Audio
Bus 002 Device 002: ID 0409:005a NEC Corp. HighSpeed Hub
Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
And if I do the lsusb -v that shows I think the correct stuff too but it is a bit long so I will not paste it here.
And finally lsmod shows:
root@woofieone:/dev# lsmod
Module Size Used by
kinect 3907 0
gspca 22986 1 kinect
omap_aes 12590 0
omap_sham 17873 0
ti_am335x_adc 5138 0
kfifo_buf 2580 1 ti_am335x_adc
industrialio 48147 2 ti_am335x_adc,kfifo_buf
rtc_omap 5026 0
uio_pdrv_genirq 3469 0
uio 8749 1 uio_pdrv_genirq
Many thanks Alexander.
Warmest regards, Mike.
For some reason I thought this driver could provide both color and depth streams. It looks like I was misinformed, but now I have two questions:
I can not get color pictures from the kinect .
I have a Rpi2 , 3.18.y .I tried fswebcam ( error ) , and camorama vlc ( black and white )
So when the library is installed, and I have /dev/video0, can I only get depth data or can I combine this library with another's for rgb?
gzip -dc /proc/config.gz > .config
gives me an error:
gzip: /proc/config.gz: No such file or directory
uname -r
gives me:
4.1.18-v7+
modprobe configs
gives me an error:
modprobe: ERROR: ../libkmod/libkmod.c:557 kmod_search_moddep() could not open moddep file '/lib/modules/4.1.18-v7+/modules.dep.bin'
Could you please help me with this?
Hey there,
When testing this out on my new Raspberry Pi 2, I ran into a couple bumps with the makefile:
$UNAME to armv7lifeq ($(UNAME),armv6l)
---------->
ifeq ($(UNAME),armv7l)
gspca.c which seemed to be referencing an undefined variable: (same as issue #14)V4L2_FL_USE_FH_PRIO
---->
V4L2_FL_USES_V4L2_FH
A google search for the undefined variable turned up the solution which worked:
http://sourceforge.net/p/adi-buildroot/bugs/263/
After those changes, I was able to make and load the libraries on my Raspberry Pi 2 and got depth output. Great!
It wasn't clear to me how to "install" the modules permanently in the kernel since make install didn't seem to exist.
idk where a make command is to begging with do i need to install it and how?
sudo -s
apt-get install build-essential bc ncurses-dev tmux git
tmux
cd /usr/src/find out which kernel you are using – in my case 3.12.20+
Mine is $ 3.10.38 so i change instructions to reflect that ...
uname -rwget https://github.com/raspberrypi/linux/archive/rpi-3.10.y.tar.gz
tar xfvz rpi-3.10.y.tar.gz
mv linux-rpi-3.10.y linux
ln -s /usr/src/linux /lib/modules/$(uname -r)/build
ln -s /usr/src/linux /lib/modules/$(uname -r)/source This gives error on my Pi, since my pwd is:
cd /src/linux pwd
/usr/src and there is no linux fodler in my /src folder
so i presume i need to be in /usr/src
cd /linux
make mrproper
*get your config*
gzip -dc /proc/config.gz > .config
*building, that is going to take a while!*
make **takes all night on my Rpi, don't have a dual boot for cross-compile**
make modules_prepare
make modules_install
*copy the new kernel image*
cp /usr/src/linux/arch/arm/boot/zImage /boot/linux-3.10.y
*choose it*
echo "kernel=linux-3.10.y" >> /boot/config.txt
reboot (out of timux at this point)
git clone https://github.com/xxorde/librekinect.git
cd librekinectready to make
makegives me the following:
make pc
make[1]: Entering directory `/home/pi/librekinect'
make -C /lib/modules/3.10.38/build M=/home/pi/librekinect modules
make[2]: Entering directory `/usr/src/linux'
CC [M] /home/pi/librekinect/gspca.o
CC [M] /home/pi/librekinect/kinect.o
Building modules, stage 2.
MODPOST 2 modules
CC /home/pi/librekinect/gspca.mod.o
LD [M] /home/pi/librekinect/gspca.ko
CC /home/pi/librekinect/kinect.mod.o
LD [M] /home/pi/librekinect/kinect.ko
make[2]: Leaving directory `/usr/src/linux'
make[1]: Leaving directory `/home/pi/librekinect'make loadFAILS and gives me the following:
pi@illacom ~/librekinect $ make load
make unload_drivers
make[1]: Entering directory `/home/pi/librekinect'
sudo sh unload_drivers.sh
Error: Module kinect is not currently loaded
Error: Module gspca is not currently loaded
Error: Module gspca_main is in use by: gspca_kinect
Error: Module gspca is not currently loaded
Error: Module kinect is not currently loaded
make[1]: Leaving directory `/home/pi/librekinect'
sudo modprobe videodev
sudo insmod gspca.ko
Error: could not insert module gspca.ko: Invalid module format
make: *** [load] Error 1Not really sure why gspca.ko is invalid module format,
I checked all folders and everything seems to be where it should be, but i might be missing something obvious, I can post contents of my folders if that helps , please help me solve this.
Thank you
Hi,
I'm working on implementing a simple SLAM without hopefully using ROS, and only C++,OPENCV. I have been able to get the raw sensor values (IR depth sensor), RGB image however not simultaneously on my Banana Pi. Ignoring the RGB Image, would is be possible for me to convert the IR depth sensor to a colour depth like this: https://graphics.stanford.edu/~mdfisher/Images/KinectSensors.png
if so how or do i required the RGB image...
Hello everybody
A friend of mine and me want to use this driver on the bananapi(should work similar as on the raspberry) as well as on Ubuntu.
I tried to install the driver on Ubuntu, according to the offical description. Unfortunately some errors occure if i want to execute make load. For the errormessage see below. Despite of this i can
open the Kinects Depthimage videostream with vlc, but unfortunately it doesn´t works with OpenCV. We are using OpenCV with Java in Eclipse. If we use the same Algorithm with the standard Notebook-Webcam everything works, but if we change the device to the kinect the same algorithm doesn´t work. Therefore we presume that the fail of the algorithm relies on the errors of the make load command.
Do you know this error? Is there any other thing we had to consider?
With my usual user:
rmmod: ERROR: Module kinect is not currently loaded
rmmod: ERROR: Module gspca is not currently loaded
rmmod: ERROR: Module gspca_main is not currently loaded
rmmod: ERROR: Module gspca_kinect is not currently loaded
rmmod: ERROR: Module gspca is not currently loaded
rmmod: ERROR: Module kinect is not currently loaded
make[1]: Verlasse Verzeichnis '/home/fabian/librekinect'
sudo modprobe videodev
sudo insmod gspca.ko
sudo insmod kinect.ko
sudo chown -f -R fabian:fabian /dev/video*
sudo chmod -f 755 /dev/video*
With root user:
make unload_drivers
make[1]: Betrete Verzeichnis '/home/fabian/librekinect'
sudo sh unload_drivers.sh
rmmod: ERROR: Module gspca_main is not currently loaded
rmmod: ERROR: Module gspca_kinect is not currently loaded
rmmod: ERROR: Module gspca is not currently loaded
rmmod: ERROR: Module kinect is not currently loaded
make[1]: Verlasse Verzeichnis '/home/fabian/librekinect'
sudo modprobe videodev
sudo insmod gspca.ko
sudo insmod kinect.ko
sudo chown -f -R root:root /dev/video*
sudo chmod -f 755 /dev/video*
God bless you
diff --git a/Makefile b/Makefile
index a3acc39..e0b829f 100644
--- a/Makefile
+++ b/Makefile
@@ -12,8 +12,8 @@ endif
EXTRA_CFLAGS += $(DEBFLAGS)
-ifeq ($(UNAME),armv61)
- AMRKDIR := /usr/src/linux
+ifeq ($(UNAME),armv6l)
+ ARMKDIR := /usr/src/linux
else
ARCH := arm
CROSS := arm-linux-gnueabi-
I successfully compiled everything and get a /dev/video0 device on my Raspberry Pi. However, what the video will show is somewhat random:
Questions:
Logs: there are lots of these in the log:
kinect: [Stream 70] Invalid magic ffff
Update: ok, I figured out how to load the drivers correctly. But the depth image stays choppy! Using kernel 3.12.29, Kinect XBox 1414, RPI B+. I'm wondering whether it's related to the version of the Kinect - which Kinect did you use, 1414 or 1473?
Hi,
I got problems with rpi.
After unpacking i do not have a branch /src/linux only /usr/src/linux
I changed to it anyway. Compiled a night.
I installed librekinect from github in home directory
Make gives kernel configuration is invalid...
Any hints ? Thanks
Armin
Will this work with xtion pro at VGA resolution?
Hello,
I'm trying to get your driver to work on a RPi running Arch Linux ARM. The driver compiles and loads fine, but I get no /dev/video*. lsusb seems to only show the motor connected:
$ lsusb
Bus 001 Device 006: ID 045e:02b0 Microsoft Corp. Xbox NUI Motor
Bus 001 Device 005: ID 0409:005a NEC Corp. HighSpeed Hub
Bus 001 Device 004: ID 2109:3431
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter
Bus 001 Device 002: ID 0424:9512 Standard Microsystems Corp. SMC9512/9514 USB Hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
From the OpenKinect wiki, I think this is normal and I just need to activate the motor to get the other two devices to appear underneath that hub, but how should I go about this? Is there a libusb driver from libfreenect that I need to use?
I get all the way through the instructions up until
gzip -dc /proc/config.gz > .config
where I get the error
gzip: /proc/config.gz: No such file or directory
What am I doing wrong?
uname -r
gives
4.1.7-v7+
platform is Raspberry Pi 2 model B
What shall I have to do to get both RGB and depth? Thanks.
I have encountered a strange issue with this module. It works flawlessly when ethernet cable is plugged in to pi, but whenever I start reading when ethernet is unplugged, the driver fails to provide video (any program - opencv code, cheese, camorama stalls with black screen and there is this error:
VIDIOC_DQBUF: No such device.
Any ideas?
I am trying to run my xbox360 kinect on my raspberry pi 2. I have followed this guide ( https://github.com/xxorde/librekinect )without errors but at the last command ( make load ) gives me this error:
root@raspberrypi:/home/pi/librekinect-master# ls
gspca.c gspca.h kinect.c Makefile readme.md unload_drivers.sh
root@raspberrypi:/home/pi/librekinect-master# make load
make unload_drivers
make[1]: Entering directory '/home/pi/librekinect-master'
sudo sh unload_drivers.sh
Error: Module kinect is not currently loaded
Error: Module gspca is not currently loaded
Error: Module gspca_main is in use by: gspca_kinect
Error: Module gspca_kinect is in use
Error: Module * is not currently loaded
make[1]: Leaving directory '/home/pi/librekinect-master'
sudo modprobe videodev
sudo insmod gspca.ko
Error: could not load module gspca.ko: No such file or directory
Makefile:42: recipe for target 'load' failed
make: *** [load] Error 1
root@raspberrypi:/home/pi/librekinect-master#
I have downloaded 3.18.y rpi image
Hi,
I am getting RGB images but not the depth data after make load and vlc v4l:///dev/video0. I have attached a screenshot of my output.
What should I do to get depth data?
Thanks

hi
I have a question about saving kinect data onto the Radxa.
I connect kinect to radxa and install libfreenect in ubuntu. when I type libfreenect-glview in terminal, the system error. beacuse radxa and other boards don't support OpenGL. howavere, the system works when type freenect-titldemo in trminal and I use commend lsusb teminal shows that I have XBOX Kinect Audio, Motor and Camera have been recognized.
the only way to get depth data of kinect is using freenect.sync_get_depth() and freenect.sync_get_video(). But when I use them, the system doesn't work and radxa isn't getting data from kinect. the system don't work, don't error.
I am programing with python OR C++.
you made usb kernel for rasPI. is it right for radxa?
how do you get data from kinect? how to fix this problem?
Thanks for everyone's help.
Hello,
While building for latest raspberry pi kernel, I got the following error:
pi@pi2 ~/libfreekinect/librekinect-master $ make
make -C /lib/modules/4.1.8+/build M=/home/pi/libfreekinect/librekinect-master modules
make[1]: Entering directory '/usr/src/linux'
CC [M] /home/pi/libfreekinect/librekinect-master/gspca.o
/home/pi/libfreekinect/librekinect-master/gspca.c: In function ‘gspca_dev_probe2’:
/home/pi/libfreekinect/librekinect-master/gspca.c:2070:2: error: ‘V4L2_FL_USE_FH_PRIO’ undeclared (first use in this function)
/home/pi/libfreekinect/librekinect-master/gspca.c:2070:2: note: each undeclared identifier is reported only once for each function it appears in
scripts/Makefile.build:264: recipe for target '/home/pi/libfreekinect/librekinect-master/gspca.o' failed
make[2]: *** [/home/pi/libfreekinect/librekinect-master/gspca.o] Error 1
Makefile:1384: recipe for target '_module_/home/pi/libfreekinect/librekinect-master' failed
make[1]: *** [_module_/home/pi/libfreekinect/librekinect-master] Error 2
make[1]: Leaving directory '/usr/src/linux'
Makefile:24: recipe for target 'default' failed
make: *** [default] Error 2
If I comment out the offending line in gscpa.c it builds and inserts, but not sure yet it will work...
in the readme.md file for the project, there is the following line under the raspberri pi example:
wget https://github.com/raspberrypi/linux/archive/rpi-3.12.y.tar.gz
...but I cannot find anything similar to that in the source control. There is no 'archive' directory, closest thing is an 'arch' directory but doesn't seem to be similar. Need some help for this step, any chance the readme can be updated with a proper url?
I've tried deleting and redownloading everything but same outcome
root@raspberrypi:/usr/src/linux# make
HOSTCC scripts/basic/fixdep
HOSTCC scripts/kconfig/conf.o
YACC scripts/kconfig/zconf.tab.c
/bin/sh: 1: bison: not found
make[2]: *** [scripts/Makefile.lib:196: scripts/kconfig/zconf.tab.c] Error 127
make[1]: *** [Makefile:534: syncconfig] Error 2
Makefile:621: include/config/auto.conf.cmd: No such file or directory
make: *** [Makefile:633: include/config/auto.conf.cmd] Error 2
Where's the missing file? I can't find it anywhere
@xxorde Thank you so much . I am not having any monitor for the output. I am using ssh to communicate with the board. I got that this can be done like calling cvCaptureFromCAM functions of OpenCV,isnt it? I will try and let you know about my proceedings. But I have a doubt that in kinect libfreenect they have many formats in depth image like mm , 10 bit, 11 bit etc, so is it possible to change these parameters in this module.
Hi Alexander,
Thank you for sparing a time to read my issue in the midst of pressing affairs.
I try use PC + OpenCV2.4 to make a demo that getting the Kinect depth image.But when running the built binary, the terminal have no output, then I try a normal webcam,everything goes well.It seems a little strange.
According to OpenCV's user guide, it says only install the PrimeSensor driver that OpenCV can grap data from Kinect. (you may search "Without PrimeSensor module OpenCV" in OpenCV User Guide to see details ). But I think that when already install the librekinect driver, the PrimeSensor driver is no needed any more.
I use this simple code in OpenCV demo :
/***************************************************************/
VideoCapture capture( CV_CAP_OPENNI );
for(;;)
{
Mat depthMap;
capture >> depthMap; // I think there may be someting wrong in this phase(eg:data I/O rate)
if( waitKey( 30 ) >= 0 )
break;
}
/***************************************************************/
and here's my PC && Raspberry Pi sys info::
root@bt:~# uname -a
Linux bt 3.13.0-32-generic #57-Ubuntu ... i686 GNU/Linux
pi@raspberrypi ~ $ uname -a
Linux raspberrypi 3.12.28 #1 PREEMPT ... armv6l GNU/Linux
if you have some advice on getting depth data from Kinect by OpenCV, please let me know :-)
Many thanks.
Warmest regards , Joe.
Hello,
I'd appricate some help here as I am new to raspberry pi development. It seems like clocksource may no longer be a part of the new 3.18.11-v7+ kernel?
When executing this part of the instructions for setting up librekinect on raspberry pi:
# building, that is going to take a while!
make
make modules_prepare
make modules_install
I get the following error:
root@raspberrypi:/usr/src/linux# make
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[1]: 'include/generated/mach-types.h' is up to date.
CALL scripts/checksyscalls.sh
CHK include/generated/compile.h
CHK kernel/config_data.h
CC drivers/clocksource/arm_arch_timer.o
drivers/clocksource/arm_arch_timer.c:47:28: error: field ‘evt’ has incomplete type
drivers/clocksource/arm_arch_timer.c: In function ‘arch_timer_reg_write’:
drivers/clocksource/arm_arch_timer.c:78:30: warning: initialization from incompatible pointer type [enabled by default]
drivers/clocksource/arm_arch_timer.c:78:30: warning: (near initialization for ‘timer’) [enabled by default]
drivers/clocksource/arm_arch_timer.c:88:30: warning: initialization from incompatible pointer type [enabled by default]
drivers/clocksource/arm_arch_timer.c:88:30: warning: (near initialization for ‘timer’) [enabled by default]
drivers/clocksource/arm_arch_timer.c: In function ‘arch_timer_reg_read’:
drivers/clocksource/arm_arch_timer.c:109:30: warning: initialization from incompatible pointer type [enabled by default]
drivers/clocksource/arm_arch_timer.c:109:30: warning: (near initialization for ‘timer’) [enabled by default]
drivers/clocksource/arm_arch_timer.c:119:30: warning: initialization from incompatible pointer type [enabled by default]
drivers/clocksource/arm_arch_timer.c:119:30: warning: (near initialization for ‘timer’) [enabled by default]
drivers/clocksource/arm_arch_timer.c: In function ‘timer_handler’:
drivers/clocksource/arm_arch_timer.c:144:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c: In function ‘timer_set_mode’:
drivers/clocksource/arm_arch_timer.c:184:7: error: ‘CLOCK_EVT_MODE_UNUSED’ undeclared (first use in this function)
drivers/clocksource/arm_arch_timer.c:184:7: note: each undeclared identifier is reported only once for each function it appears in
drivers/clocksource/arm_arch_timer.c:185:7: error: ‘CLOCK_EVT_MODE_SHUTDOWN’ undeclared (first use in this function)
drivers/clocksource/arm_arch_timer.c: At top level:
drivers/clocksource/arm_arch_timer.c:196:17: warning: ‘enum clock_event_mode’ declared inside parameter list [enabled by default]
drivers/clocksource/arm_arch_timer.c:196:17: warning: its scope is only this definition or declaration, which is probably not what you want [enabled by default]
drivers/clocksource/arm_arch_timer.c:195:60: error: parameter 1 (‘mode’) has incomplete type
drivers/clocksource/arm_arch_timer.c:195:13: warning: function declaration isn’t a prototype [-Wstrict-prototypes]
drivers/clocksource/arm_arch_timer.c:202:17: warning: ‘enum clock_event_mode’ declared inside parameter list [enabled by default]
drivers/clocksource/arm_arch_timer.c:201:60: error: parameter 1 (‘mode’) has incomplete type
drivers/clocksource/arm_arch_timer.c:201:13: warning: function declaration isn’t a prototype [-Wstrict-prototypes]
drivers/clocksource/arm_arch_timer.c:208:14: warning: ‘enum clock_event_mode’ declared inside parameter list [enabled by default]
drivers/clocksource/arm_arch_timer.c:207:64: error: parameter 1 (‘mode’) has incomplete type
drivers/clocksource/arm_arch_timer.c:207:13: warning: function declaration isn’t a prototype [-Wstrict-prototypes]
drivers/clocksource/arm_arch_timer.c:214:14: warning: ‘enum clock_event_mode’ declared inside parameter list [enabled by default]
drivers/clocksource/arm_arch_timer.c:213:64: error: parameter 1 (‘mode’) has incomplete type
drivers/clocksource/arm_arch_timer.c:213:13: warning: function declaration isn’t a prototype [-Wstrict-prototypes]
drivers/clocksource/arm_arch_timer.c: In function ‘__arch_timer_setup’:
drivers/clocksource/arm_arch_timer.c:261:5: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:261:18: error: ‘CLOCK_EVT_FEAT_ONESHOT’ undeclared (first use in this function)
drivers/clocksource/arm_arch_timer.c:264:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:264:20: error: ‘CLOCK_EVT_FEAT_C3STOP’ undeclared (first use in this function)
drivers/clocksource/arm_arch_timer.c:265:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:266:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:267:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:269:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:270:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:271:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:273:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:274:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:275:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:278:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:279:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:280:6: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:282:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:283:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:286:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:287:7: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:292:5: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:292:16: error: ‘CLOCK_EVT_MODE_SHUTDOWN’ undeclared (first use in this function)
drivers/clocksource/arm_arch_timer.c:294:2: error: implicit declaration of function ‘clockevents_config_and_register’ [-Werror=implicit-function-declaration]
drivers/clocksource/arm_arch_timer.c: In function ‘arch_timer_stop’:
drivers/clocksource/arm_arch_timer.c:426:2: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:437:5: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:437:16: error: ‘CLOCK_EVT_MODE_UNUSED’ undeclared (first use in this function)
drivers/clocksource/arm_arch_timer.c: In function ‘arch_timer_cpu_notify’:
drivers/clocksource/arm_arch_timer.c:449:3: error: invalid use of undefined type ‘struct clock_event_device’
drivers/clocksource/arm_arch_timer.c:449:20: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c:452:3: error: invalid use of undefined type ‘struct clock_event_device’
drivers/clocksource/arm_arch_timer.c:452:19: error: dereferencing pointer to incomplete type
drivers/clocksource/arm_arch_timer.c: In function ‘arch_timer_register’:
drivers/clocksource/arm_arch_timer.c:468:19: error: invalid application of ‘sizeof’ to incomplete type ‘struct clock_event_device’
drivers/clocksource/arm_arch_timer.c:468:19: error: invalid application of ‘__alignof__’ to incomplete type ‘struct clock_event_device’
drivers/clocksource/arm_arch_timer.c:503:2: error: invalid use of undefined type ‘struct clock_event_device’
drivers/clocksource/arm_arch_timer.c:503:19: error: dereferencing pointer to incomplete type
cc1: some warnings being treated as errors
scripts/Makefile.build:308: recipe for target 'drivers/clocksource/arm_arch_timer.o' failed
make[2]: *** [drivers/clocksource/arm_arch_timer.o] Error 1
scripts/Makefile.build:455: recipe for target 'drivers/clocksource' failed
make[1]: *** [drivers/clocksource] Error 2
Makefile:797: recipe for target 'drivers' failed
make: *** [drivers] Error 2
root@raspberrypi:/usr/src/linux# uname -r
3.18.11-v7+
Hi
If I hook up 3 Kinect 360s, will the driver make them accessible concurrently, presumably as video[0,1,2]?
Checking before I go invest in more Kinects.
TIA
Does it work with Kinect V2? If not, do you have any suggestions about how to interface a Kinect V2 with a Raspberry Pi 2? Thanks in advance!
Finally got to make work librekinect on a Raspberry Pi 3 and suddenly the next time I open de stream I got a IR stream instead of a Depth Stream, I don't have idea about why few times i got the depth stream as expected and then got this Stream. Attaching photos...
First:

Finally:

Sometimes doesn't open :(
Following the documentation, I get the following error:
[pi@raspberrypi]~$ mv linux-rpi-4.1.y/ linux
[pi@raspberrypi]~$ ln -s /usr/src/linux /lib/modules/$(uname -r)/build
ln: failed to create symbolic link `/lib/modules/4.1.6-v7+/build': File exists
[pi@raspberrypi]~$
It seems like ln -s does not overwrite the destination file if it exists. Should I delete the old file at /lib/modules/4.1.6-v7+/build?
I downloaded and extracted linux-rpi-4.1.y/ via wget https://github.com/raspberrypi/linux/archive/rpi-4.1.y.tar.gzw
Here is additional info about my system:
[pi@raspberrypi]~$ uname -r
4.1.6-v7+
Hi xxorde
I dont know if this is the correct way to ask something but i only find this.
I have been trying to install the driver on a raspberry pi B for like an entire week but i always get and error in the "make load" of the driver and its the same or similar error that someone post in other issue but in the end i couldnt find a solution. Im using the raspbian OS and the kernel version is 3.12.29
The "make" process goes well but the "make load" not
root@raspberrypi:/home/pi# cd librekinect
root@raspberrypi:/home/pi/librekinect# make
make pc
make[1]: Entering directory '/home/pi/librekinect'
make -C /lib/modules/3.12.29/build M=/home/pi/librekinect modules
make[2]: Entering directory '/usr/src/linux'
Building modules, stage 2.
MODPOST 2 modules
make[2]: Leaving directory '/usr/src/linux'
make[1]: Leaving directory '/home/pi/librekinect'
root@raspberrypi:/home/pi/librekinect# make load
make unload_drivers
make[1]: Entering directory '/home/pi/librekinect'
sudo sh unload_drivers.sh
Error: Module kinect is not currently loaded
Error: Module gspca is not currently loaded
Error: Module gspca_main is in use by: gspca_kinect
Error: Module gspca is not currently loaded
Error: Module kinect is not currently loaded
make[1]: Leaving directory '/home/pi/librekinect'
sudo modprobe videodev
sudo insmod gspca.ko
Error: could not insert module gspca.ko: Invalid module format
Makefile:42: recipe for target 'load' failed
make: *** [load] Error 1
root@raspberrypi:/home/pi/librekinect#
Do you know what is wrong and how i could fix it?
Either way im really need to get working the kinect with the raspberry pi, so with the kinect for xbox 360 I "lsusb" and see that the 3 devices were recognized the motor, audio and camera. So i decided to install and run guvcview to see what i get. Then to my surprise i was seeing a stream of the depth sensor in my screen, so i think at least the driver is working or some parts of it. Then I tried to the same thing but with the kinect for windows but when i "lsusb" it only shows that there were 2 devices of microsft corp. so i decided to run guvcview again, but this time i get the stream of the RGB camera and not the one from the depth sensor. So i want to ask you if this should work with both kinects or what should i do get this work on the kinect for windows? (this is because i only own the windows version and the xbox 360 version isnt mine)
In advance thanks to the ones who knows something that would help me.
Hi xxorde,
thanks for the great work, I compiled and ran your driver on the Raspberry Pi B+ without a problem!
Unfortunately I can not find any way to get a depth stream, either in my own code or in Camorama.
I my own experiment I made a function that converts 10bit bitstream to 8bit bytestream and I can finally see the image, however it turns out it's not depth but IR stream:(
Camorama can get color stream in 640x480 and high-res, or IR stream in 640x480 - depending on the quality setting chosen in the menu.
Could you please let us know what is the most reliable way to get the depth stream using your driver, either in Camorama or even better in an example code snippet?
best wishes and happy new year:)
nesa
I've tried months to get the depth data from Kinect.
Thinks to Alexander's pretty driver,
now we can get the Y10B image just using fopen() && fread() to read /dev/vedio0.
here is my code,with OpenCV + librekinect everything goes well on PC:>the screenshot<.
But, I've met problems on Raspberry PI.
when I run the binarry built from the same code , the program can not open the Kinect or get the data instantlly.
though the program still can get the data,but the data format is wrong,which just are broken fragments from one or two depth frames.
In my opinion is due to Raspberry Pi's poor hardware,because when we use Camorama open the Kinect with this librekinect drive, the vedio have a short time-delay.
May the camorama use Gtk's buffer to avoid above problem,
but I wanna use Kinect with Raspberry in embedded environment without monito
so do somebody have good ideas about how to correct my code or other meanings to get the depth frame data fluencily?
I am a beginner to Kinect, feel free to disscuss this problem with me && great to hear your suggestions :-)
Hello,
I recently the driver set up on my pi, and it is working perfectly fine with camorama (however the large video is very glitchy). I'm trying to use OpenCV to access the camera and am getting hit with an error.
In my OpenCV code, I have tried opening the camera with VideoCapture cap(0) and with CvCapture *input_camera = cvCaptureFromCAM(0). However, it seems to be hitting a problem establishing the camera, as the terminal becomes flooded with the following error message
VIDEOC_QUERYCTRL: Inappropriate ioctl for device
If this driver allows kinect to be used as a standard webcam, this should be no problem. I know it must be something I am doing wrong because camorama is able to take control of the camera without issue. Any help for this issue would greatly appreciated.
I've got librekinect working with my Kinect, but I'd also love to use it with an Xtion pro live (primesense sensor) that I have sitting around.
Do you have any advice or suggestions for getting this working? I'm willing to experiment and hack around on the driver if I need to, though I'm quite a novice in this area.
I was able to modify the USB device table in kinect.c and succeeded in getting /dev/video0 to appear, and camorama even managed to display "primesense camera" in it's titlebar, but unfortunately the video was unable to display and just recieved an error.
I just tweaked here the USB_DEVICE to match the Xtion pro live signiture from lsusb:
/* -- module initialisation -- */
static const struct usb_device_id device_table[] = {
{USB_DEVICE(0x1d27, 0x0601)},
{USB_DEVICE(0x045e, 0x02bf)},
{}
};
Any tips or direction you could give me to get this working would be appreciated! I'm willing to develop and contribute this back as a PR if I can figure it out.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.
{kind=link}
{kind=link}