- Pronunciation : Ar-Ray (えいあーる・れい , ei ar rei)

Please support me❗ 👉 
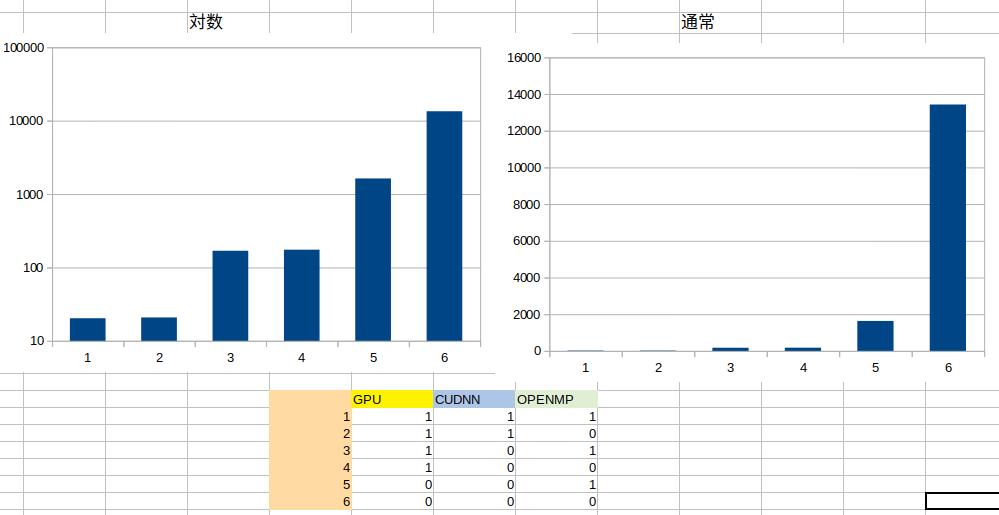
darknet + ROS2 Humble + OpenCV4 + CUDA 11(cuDNN, Jetson Orin)
License: Apache License 2.0

































































Hi!
I'm trying to implement darknet_ros for ROS2 but my laptop doesn't have an dedicated graphic card and it seems that the foxy branch of darknet_ros doesn't compile, so I was wondering if is it possible to build your implementation without CUDA?
Originally, darknet is supposed to support cuDNN and TensorRT, but it does not.
In the past I have verified an 8x speedup by using cuDNN.
Link : https://ar-ray.hatenablog.com/entry/2021/02/04/235709
However, I could not find cuDNN by adding find(CUDNN REQUIRED). (By the way, I was able to find cuDNN for the one downloaded directly from darknet. Strange...)
Does anyone know how to find cuDNN in CMakeLists?
hi,
There was a problem running the darknet_ros_fp16 that no detected boxes on image.And the console output Object: ,it seem that there is no detection at all.How can i fix this problem?thank you!
ubuntu 20.04 ros2-foxy

Thank you for using darknet-yolo-v4 !
I'm very interested in your running performance. Please let me know your results.
ROS2 Dashing or later
OpenCV 4.2 or later
CUDA 11.0 or later
ENABLE CUDNN !
I am using action to get bounding_boxes of an image, but I noticed that the response if for previous request.
The flow was like:
Send request ID 0, receive response ID 0 (blank image)
Send request ID 1, receive response ID 0 (image with correct bounding boxes from request ID 0)
Send request ID 2, receive response ID 1 (as above)
...
Do anyone encounter same issue?
I want to use YOLO 3D so that i can grab the depth or distance that captured by ZED camera. Can you give me a guidance that will launch the YOLO 3D bounding box in ur repo?
This is a long standing issue. darknet_ros processes images very quickly. When the images come from a webcam, darknet_ros rescans the same image multiple times before the next frame arrives. With a good GPU, a video frame may be scanned 10 or more times. This is a waste of GPU.
A simple fix is to check if the frame has already been scanned before scanning it again. Replacing YoloObjectDetector.cpp with the file below reduces GPU usage from ~56% to ~8% (when using a 1080ti GPU):
/*
* YoloObjectDetector.cpp
*
* Created on: Dec 19, 2016
* Author: Marko Bjelonic
* Institute: ETH Zurich, Robotic Systems Lab
*/
// yolo object detector
#include "darknet_ros/YoloObjectDetector.hpp"
// Check for xServer
#include <X11/Xlib.h>
//The changes enabled by this switch reduce GPU usage considerably when processing
//live video (by preventing repeated scanning of the same video frame).
//GPU usage with original code: 51%, 52%, 56%
//GPU usage with switch enabled: 9%, 8%, 6%
#define UNIQUE_FRAMES
#ifdef DARKNET_FILE_PATH
std::string darknetFilePath_ = DARKNET_FILE_PATH;
#else
#error Path of darknet repository is not defined in CMakeLists.txt.
#endif
namespace darknet_ros {
char *cfg;
char *weights;
char *data;
char **detectionNames;
YoloObjectDetector::YoloObjectDetector()
: Node("darknet_ros"),
numClasses_(0),
classLabels_(0),
rosBoxes_(0),
rosBoxCounter_(0),
action_active_(false),
preempt_requested_(false)
{
RCLCPP_INFO(get_logger(), "[YoloObjectDetector] Node started.");
declare_parameter("image_view.enable_opencv", true);
declare_parameter("image_view.wait_key_delay", 3);
declare_parameter("image_view.enable_console_output", false);
declare_parameter("yolo_model.detection_classes.names", std::vector<std::string>(0));
declare_parameter("yolo_model.threshold.value", 0.3f);
declare_parameter("yolo_model.weight_file.name", std::string("yolov2-tiny.weights"));
declare_parameter("weights_path", std::string("/default"));
declare_parameter("yolo_model.config_file.name", std::string("yolov2-tiny.cfg"));
declare_parameter("config_path", std::string("/default"));
declare_parameter("subscribers.camera_reading.topic", std::string("/camera/image_raw"));
declare_parameter("subscribers.camera_reading.queue_size", 1);
declare_parameter("publishers.object_detector.topic", std::string("found_object"));
declare_parameter("publishers.object_detector.queue_size", 1);
declare_parameter("publishers.object_detector.latch", false);
declare_parameter("publishers.bounding_boxes.topic", std::string("bounding_boxes"));
declare_parameter("publishers.bounding_boxes.queue_size", 1);
declare_parameter("publishers.bounding_boxes.latch", false);
declare_parameter("publishers.detection_image.topic", std::string("detection_image"));
declare_parameter("publishers.detection_image.queue_size", 1);
declare_parameter("publishers.detection_image.latch", true);
declare_parameter("yolo_model.window_name", std::string("YOLO"));
declare_parameter("actions.camera_reading.topic", std::string("check_for_objects"));
}
YoloObjectDetector::~YoloObjectDetector()
{
{
std::unique_lock<std::shared_mutex> lockNodeStatus(mutexNodeStatus_);
isNodeRunning_ = false;
}
yoloThread_.join();
}
bool YoloObjectDetector::readParameters()
{
// Load common parameters.
get_parameter("image_view.enable_opencv", viewImage_);
get_parameter("image_view.wait_key_delay", waitKeyDelay_);
get_parameter("image_view.enable_console_output", enableConsoleOutput_);
get_parameter("yolo_model.window_name", windowName_);
// Check if Xserver is running on Linux.
if (XOpenDisplay(NULL)) {
// Do nothing!
RCLCPP_INFO(get_logger(), "[YoloObjectDetector] Xserver is running.");
} else {
RCLCPP_INFO(get_logger(), "[YoloObjectDetector] Xserver is not running.");
viewImage_ = false;
}
// Set vector sizes.
get_parameter("yolo_model.detection_classes.names", classLabels_);
numClasses_ = classLabels_.size();
rosBoxes_ = std::vector<std::vector<RosBox_> >(numClasses_);
rosBoxCounter_ = std::vector<int>(numClasses_);
return true;
}
void YoloObjectDetector::init()
{
// Read parameters from config file.
if (!readParameters()) {
rclcpp::shutdown();
}
RCLCPP_INFO(get_logger(), "[YoloObjectDetector] init().");
// Initialize deep network of darknet.
std::string weightsPath;
std::string configPath;
std::string dataPath;
std::string configModel;
std::string weightsModel;
// Threshold of object detection.
float thresh;
get_parameter("yolo_model.threshold.value", thresh);
// Path to weights file.
get_parameter("yolo_model.weight_file.name", weightsModel);
get_parameter("weights_path", weightsPath);
weightsPath += "/" + weightsModel;
weights = new char[weightsPath.length() + 1];
strcpy(weights, weightsPath.c_str());
// Path to config file.
get_parameter("yolo_model.config_file.name", configModel);
get_parameter("config_path", configPath);
configPath += "/" + configModel;
cfg = new char[configPath.length() + 1];
strcpy(cfg, configPath.c_str());
// Path to data folder.
dataPath = darknetFilePath_;
dataPath += "/data";
data = new char[dataPath.length() + 1];
strcpy(data, dataPath.c_str());
// Get classes.
detectionNames = (char**) realloc((void*) detectionNames, (numClasses_ + 1) * sizeof(char*));
for (int i = 0; i < numClasses_; i++) {
detectionNames[i] = new char[classLabels_[i].length() + 1];
strcpy(detectionNames[i], classLabels_[i].c_str());
}
// Load network.
setupNetwork(cfg, weights, data, thresh, detectionNames, numClasses_,
0, 0, 1, 0.5, 0, 0, 0, 0);
yoloThread_ = std::thread(&YoloObjectDetector::yolo, this);
// Initialize publisher and subscriber.
std::string cameraTopicName;
int cameraQueueSize;
std::string objectDetectorTopicName;
int objectDetectorQueueSize;
bool objectDetectorLatch;
std::string boundingBoxesTopicName;
int boundingBoxesQueueSize;
bool boundingBoxesLatch;
std::string detectionImageTopicName;
int detectionImageQueueSize;
bool detectionImageLatch;
get_parameter("subscribers.camera_reading.topic", cameraTopicName);
get_parameter("subscribers.camera_reading.queue_size", cameraQueueSize);
get_parameter("publishers.object_detector.topic", objectDetectorTopicName);
get_parameter("publishers.object_detector.queue_size", objectDetectorQueueSize);
get_parameter("publishers.object_detector.latch", objectDetectorLatch);
get_parameter("publishers.bounding_boxes.topic", boundingBoxesTopicName);
get_parameter("publishers.bounding_boxes.queue_size", boundingBoxesQueueSize);
get_parameter("publishers.bounding_boxes.latch", boundingBoxesLatch);
get_parameter("publishers.detection_image.topic", detectionImageTopicName);
get_parameter("publishers.detection_image.queue_size", detectionImageQueueSize);
get_parameter("publishers.detection_image.latch", detectionImageLatch);
it_ = std::make_shared<image_transport::ImageTransport>(shared_from_this());
using std::placeholders::_1;
imageSubscriber_ = it_->subscribe(cameraTopicName, cameraQueueSize,
std::bind(&YoloObjectDetector::cameraCallback, this, _1));
rclcpp::QoS object_publisher_qos(objectDetectorQueueSize);
if (objectDetectorLatch) {
object_publisher_qos.transient_local();
}
objectPublisher_ = this->create_publisher<darknet_ros_msgs::msg::ObjectCount>(
objectDetectorTopicName, object_publisher_qos);
rclcpp::QoS bounding_boxes_publisher_qos(boundingBoxesQueueSize);
if (boundingBoxesLatch) {
bounding_boxes_publisher_qos.transient_local();
}
boundingBoxesPublisher_ = this->create_publisher<darknet_ros_msgs::msg::BoundingBoxes>(
boundingBoxesTopicName, bounding_boxes_publisher_qos);
rclcpp::QoS detection_image_publisher_qos(detectionImageQueueSize);
if (detectionImageLatch) {
detection_image_publisher_qos.transient_local();
}
detectionImagePublisher_ = this->create_publisher<sensor_msgs::msg::Image>(
detectionImageTopicName, detection_image_publisher_qos);
// Action servers.
std::string checkForObjectsActionName;
get_parameter("actions.camera_reading.topic", checkForObjectsActionName);
using std::placeholders::_2;
this->checkForObjectsActionServer_ = rclcpp_action::create_server<CheckForObjectsAction>(
this->get_node_base_interface(),
this->get_node_clock_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"checkForObjectsActionName",
std::bind(&YoloObjectDetector::checkForObjectsActionGoalCB, this, _1, _2),
std::bind(&YoloObjectDetector::checkForObjectsActionPreemptCB, this, _1),
std::bind(&YoloObjectDetector::checkForObjectsActionAcceptedCB, this, _1));
}
void YoloObjectDetector::cameraCallback(const sensor_msgs::msg::Image::ConstSharedPtr & msg)
{
RCLCPP_DEBUG(get_logger(), "[YoloObjectDetector] USB image received.");
cv_bridge::CvImagePtr cam_image;
try {
cam_image = cv_bridge::toCvCopy(msg, "bgr8");
} catch (cv_bridge::Exception& e) {
RCLCPP_ERROR(get_logger(), "cv_bridge exception: %s", e.what());
return;
}
if (cam_image) {
{
std::unique_lock<std::shared_mutex> lockImageCallback(mutexImageCallback_);
imageHeader_ = msg->header;
camImageCopy_ = cam_image->image.clone();
}
{
std::unique_lock<std::shared_mutex> lockImageStatus(mutexImageStatus_);
imageStatus_ = true;
}
frameWidth_ = cam_image->image.size().width;
frameHeight_ = cam_image->image.size().height;
}
return;
}
rclcpp_action::GoalResponse YoloObjectDetector::checkForObjectsActionGoalCB(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const CheckForObjectsAction::Goal> goal)
{
RCLCPP_DEBUG(get_logger(), "[YoloObjectDetector] Start check for objects action.");
auto imageAction = goal->image;
cv_bridge::CvImagePtr cam_image;
try {
cam_image = cv_bridge::toCvCopy(imageAction, "bgr8");
} catch (cv_bridge::Exception& e) {
RCLCPP_ERROR(get_logger(), "cv_bridge exception: %s", e.what());
rclcpp_action::GoalResponse::REJECT;
}
if (cam_image) {
{
std::unique_lock<std::shared_mutex> lockImageCallback(mutexImageCallback_);
camImageCopy_ = cam_image->image.clone();
}
{
std::unique_lock<std::shared_mutex> lockImageCallback(mutexActionStatus_);
actionId_ = goal->id;
}
{
std::unique_lock<std::shared_mutex> lockImageStatus(mutexImageStatus_);
imageStatus_ = true;
}
frameWidth_ = cam_image->image.size().width;
frameHeight_ = cam_image->image.size().height;
}
preempt_requested_ = false;
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE;
}
rclcpp_action::CancelResponse
YoloObjectDetector::checkForObjectsActionPreemptCB(
const std::shared_ptr<GoalHandleCheckForObjectsAction> goal_handle)
{
RCLCPP_DEBUG(get_logger(), "[YoloObjectDetector] Preempt check for objects action.");
preempt_requested_ = true;
return rclcpp_action::CancelResponse::ACCEPT;
}
void
YoloObjectDetector::checkForObjectsActionAcceptedCB(
const std::shared_ptr<GoalHandleCheckForObjectsAction> goal_handle)
{
RCLCPP_DEBUG(get_logger(), "[YoloObjectDetector] action accepted.");
action_active_ = true;
goal_handle_ = goal_handle;
}
bool YoloObjectDetector::isCheckingForObjects() const
{
return (rclcpp::ok() && action_active_ && !preempt_requested_);
}
bool YoloObjectDetector::publishDetectionImage(const cv::Mat& detectionImage)
{
if (detectionImagePublisher_->get_subscription_count() < 1)
return false;
cv_bridge::CvImage cvImage;
cvImage.header.stamp = this->now();
cvImage.header.frame_id = "detection_image";
cvImage.encoding = "bgr8";
cvImage.image = detectionImage;
detectionImagePublisher_->publish(*cvImage.toImageMsg());
RCLCPP_DEBUG(get_logger(), "Detection image has been published.");
return true;
}
int YoloObjectDetector::sizeNetwork(network *net)
{
int i;
int count = 0;
for(i = 0; i < net->n; ++i){
layer l = net->layers[i];
if(l.type == YOLO || l.type == REGION || l.type == DETECTION){
count += l.outputs;
}
}
return count;
}
void YoloObjectDetector::rememberNetwork(network *net)
{
int i;
int count = 0;
for(i = 0; i < net->n; ++i){
layer l = net->layers[i];
if(l.type == YOLO || l.type == REGION || l.type == DETECTION){
memcpy(predictions_[demoIndex_] + count, net->layers[i].output, sizeof(float) * l.outputs);
count += l.outputs;
}
}
}
detection *YoloObjectDetector::avgPredictions(network *net, int *nboxes)
{
int i, j;
int count = 0;
fill_cpu(demoTotal_, 0, avg_, 1);
for(j = 0; j < demoFrame_; ++j){
axpy_cpu(demoTotal_, 1./demoFrame_, predictions_[j], 1, avg_, 1);
}
for(i = 0; i < net->n; ++i){
layer l = net->layers[i];
if(l.type == YOLO || l.type == REGION || l.type == DETECTION){
memcpy(l.output, avg_ + count, sizeof(float) * l.outputs);
count += l.outputs;
}
}
// detection *dets = get_network_boxes(net, buff_[0].w, buff_[0].h, demoThresh_, demoHier_, 0, 1, nboxes);
detection *dets = get_network_boxes(net, buff_[0].w, buff_[0].h, demoThresh_, demoHier_, 0, 1, nboxes, 1); // letter box
return dets;
}
void *YoloObjectDetector::detectInThread()
{
#ifdef UNIQUE_FRAMES
static uint32_t prevSeq;
if (prevSeq==headerBuff_[(buffIndex_ + 2) % 3].stamp.nanosec) {
return 0;
}
prevSeq = headerBuff_[(buffIndex_ + 2) % 3].stamp.nanosec;
#endif
running_ = 1;
float nms = .4;
// mat_cv* show_img = NULL;
layer l = net_->layers[net_->n - 1];
float *X = buffLetter_[(buffIndex_ + 2) % 3].data;
float *prediction = network_predict(*net_, X);
rememberNetwork(net_);
detection *dets = 0;
int nboxes = 0;
dets = avgPredictions(net_, &nboxes);
if (nms > 0) do_nms_obj(dets, nboxes, l.classes, nms);
if (enableConsoleOutput_) {
printf("\033[2J");
printf("\033[1;1H");
printf("\nFPS:%.1f : ( %s )\n",fps_,ss_fps.str().c_str());
printf("Objects:\n\n");
}
image display = buff_[(buffIndex_+2) % 3];
// draw_detections(display, dets, nboxes, demoThresh_, demoNames_, demoAlphabet_, demoClasses_);
draw_detections_v3(display, dets, nboxes, demoThresh_, demoNames_, demoAlphabet_, demoClasses_, 1);
// extract the bounding boxes and send them to ROS
int i, j;
int count = 0;
for (i = 0; i < nboxes; ++i) {
float xmin = dets[i].bbox.x - dets[i].bbox.w / 2.;
float xmax = dets[i].bbox.x + dets[i].bbox.w / 2.;
float ymin = dets[i].bbox.y - dets[i].bbox.h / 2.;
float ymax = dets[i].bbox.y + dets[i].bbox.h / 2.;
if (xmin < 0)
xmin = 0;
if (ymin < 0)
ymin = 0;
if (xmax > 1)
xmax = 1;
if (ymax > 1)
ymax = 1;
// iterate through possible boxes and collect the bounding boxes
for (j = 0; j < demoClasses_; ++j) {
if (dets[i].prob[j]) {
float x_center = (xmin + xmax) / 2;
float y_center = (ymin + ymax) / 2;
float BoundingBox_width = xmax - xmin;
float BoundingBox_height = ymax - ymin;
// define bounding box
// BoundingBox must be 1% size of frame (3.2x2.4 pixels)
if (BoundingBox_width > 0.01 && BoundingBox_height > 0.01) {
roiBoxes_[count].x = x_center;
roiBoxes_[count].y = y_center;
roiBoxes_[count].w = BoundingBox_width;
roiBoxes_[count].h = BoundingBox_height;
roiBoxes_[count].Class = j;
roiBoxes_[count].prob = dets[i].prob[j];
count++;
}
}
}
}
// create array to store found bounding boxes
// if no object detected, make sure that ROS knows that num = 0
if (count == 0) {
roiBoxes_[0].num = 0;
} else {
roiBoxes_[0].num = count;
}
free_detections(dets, nboxes);
demoIndex_ = (demoIndex_ + 1) % demoFrame_;
running_ = 0;
return 0;
}
void* YoloObjectDetector::fetchInThread() {
{
std::shared_lock<std::shared_mutex> lock(mutexImageCallback_);
CvMatWithHeader_ imageAndHeader = getCvMatWithHeader();
free_image(buff_[buffIndex_]);
buff_[buffIndex_] = mat_to_image(imageAndHeader.image);
headerBuff_[buffIndex_] = imageAndHeader.header;
buffId_[buffIndex_] = actionId_;
}
rgbgr_image(buff_[buffIndex_]);
letterbox_image_into(buff_[buffIndex_], net_->w, net_->h, buffLetter_[buffIndex_]);
return 0;
}
float get_pixel_cp(image m, int x, int y, int c)
{
assert(x < m.w && y < m.h && c < m.c);
return m.data[c*m.h*m.w + y*m.w + x];
}
int windows = 0;
void* YoloObjectDetector::displayInThread(void* ptr) {
#ifdef UNIQUE_FRAMES
static uint32_t prevSeq;
if (prevSeq==headerBuff_[(buffIndex_ + 1)%3].stamp.nanosec) {
return 0;
}
prevSeq = headerBuff_[(buffIndex_ + 1)%3].stamp.nanosec;
#endif
show_image_cv(buff_[(buffIndex_ + 1) % 3], windowName_.c_str());
int c = cv::waitKey(waitKeyDelay_);
if (c != -1) c = c % 256;
if (c == 27) {
demoDone_ = 1;
return 0;
} else if (c == 82) {
demoThresh_ += .02;
} else if (c == 84) {
demoThresh_ -= .02;
if (demoThresh_ <= .02) demoThresh_ = .02;
} else if (c == 83) {
demoHier_ += .02;
} else if (c == 81) {
demoHier_ -= .02;
if (demoHier_ <= .0) demoHier_ = .0;
}
return 0;
}
void *YoloObjectDetector::displayLoop(void *ptr)
{
while (1) {
displayInThread(0);
}
}
void *YoloObjectDetector::detectLoop(void *ptr)
{
while (1) {
detectInThread();
}
}
image **load_alphabet_with_file_cp(char *datafile) {
int i, j;
const int nsize = 8;
image **alphabets = (image**)calloc(nsize, sizeof(image));
char* labels = "/labels/%d_%d.png";
char * files = (char *) malloc(1 + strlen(datafile)+ strlen(labels) );
strcpy(files, datafile);
strcat(files, labels);
for(j = 0; j < nsize; ++j){
alphabets[j] = (image*)calloc(128, sizeof(image));
for(i = 32; i < 127; ++i){
char buff[256];
sprintf(buff, files, i, j);
alphabets[j][i] = load_image_color(buff, 0, 0);
}
}
return alphabets;
}
void YoloObjectDetector::setupNetwork(char *cfgfile, char *weightfile, char *datafile, float thresh,
char **names, int classes,
int delay, char *prefix, int avg_frames, float hier, int w, int h,
int frames, int fullscreen)
{
demoPrefix_ = prefix;
demoDelay_ = delay;
demoFrame_ = avg_frames;
image **alphabet = load_alphabet_with_file_cp(datafile);
demoNames_ = names;
demoAlphabet_ = alphabet;
demoClasses_ = classes;
demoThresh_ = thresh;
demoHier_ = hier;
fullScreen_ = fullscreen;
printf("YOLO V3\n");
net_ = load_network(cfgfile, weightfile, 0);
set_batch_network(net_, 1);
}
void YoloObjectDetector::yolo()
{
static int start_count = 0;
const auto wait_duration = std::chrono::milliseconds(2000);
while (!getImageStatus()) {
printf("Waiting for image.\n");
if (!isNodeRunning()) {
return;
}
std::this_thread::sleep_for(wait_duration);
}
std::thread detect_thread;
std::thread fetch_thread;
srand(2222222);
int i;
demoTotal_ = sizeNetwork(net_);
predictions_ = (float **) calloc(demoFrame_, sizeof(float*));
for (i = 0; i < demoFrame_; ++i){
predictions_[i] = (float *) calloc(demoTotal_, sizeof(float));
}
avg_ = (float *) calloc(demoTotal_, sizeof(float));
layer l = net_->layers[net_->n - 1];
roiBoxes_ = (darknet_ros::RosBox_ *) calloc(l.w * l.h * l.n, sizeof(darknet_ros::RosBox_));
{
std::shared_lock<std::shared_mutex> lock(mutexImageCallback_);
CvMatWithHeader_ imageAndHeader = getCvMatWithHeader();
buff_[0] = mat_to_image(imageAndHeader.image);
headerBuff_[0] = imageAndHeader.header;
}
buff_[1] = copy_image(buff_[0]);
buff_[2] = copy_image(buff_[0]);
headerBuff_[1] = headerBuff_[0];
headerBuff_[2] = headerBuff_[0];
buffLetter_[0] = letterbox_image(buff_[0], net_->w, net_->h);
buffLetter_[1] = letterbox_image(buff_[0], net_->w, net_->h);
buffLetter_[2] = letterbox_image(buff_[0], net_->w, net_->h);
// buff_[0] = mat_to_image(imageAndHeader.image);
disp_ = image_to_mat(buff_[0]);
int count = 0;
if (!demoPrefix_ && viewImage_) {
cv::namedWindow(windowName_.c_str(), cv::WINDOW_NORMAL);
if (fullScreen_) {
cv::setWindowProperty(windowName_.c_str(), cv::WND_PROP_FULLSCREEN, cv::WINDOW_FULLSCREEN);
} else {
cv::moveWindow(windowName_.c_str(), 0, 0);
cv::resizeWindow(windowName_.c_str(), 640, 480);
}
}
demoTime_ = what_time_is_it_now();
while (!demoDone_) {
buffIndex_ = (buffIndex_ + 1) % 3;
fetch_thread = std::thread(&YoloObjectDetector::fetchInThread, this);
detect_thread = std::thread(&YoloObjectDetector::detectInThread, this);
if (!demoPrefix_) {
#ifdef UNIQUE_FRAMES
static uint32_t prevSeq;
if (prevSeq!=headerBuff_[buffIndex_].stamp.nanosec) {
fps_ = 1./(what_time_is_it_now() - demoTime_);
demoTime_ = what_time_is_it_now();
prevSeq = headerBuff_[buffIndex_].stamp.nanosec;
}
#else
fps_ = 1./(what_time_is_it_now() - demoTime_);
if (start_count > START_COUNT) {
if (fps_ > max_fps)
max_fps = fps_;
else if (fps_ < min_fps)
min_fps = fps_;
}
else
start_count++;
ss_fps.str("");
ss_fps << "MAX:" << max_fps << " MIN:" << min_fps;
demoTime_ = what_time_is_it_now();
#endif
if (viewImage_) {
displayInThread(0);
} else {
generate_image_cp(buff_[(buffIndex_ + 1)%3], disp_);
}
publishInThread();
} else {
char name[256];
sprintf(name, "%s_%08d", demoPrefix_, count);
save_image(buff_[(buffIndex_ + 1) % 3], name);
}
fetch_thread.join();
detect_thread.join();
++count;
if (!isNodeRunning()) {
demoDone_ = true;
}
}
}
CvMatWithHeader_ YoloObjectDetector::getCvMatWithHeader() {
CvMatWithHeader_ header = {.image = camImageCopy_, .header = imageHeader_};
return header;
}
bool YoloObjectDetector::getImageStatus(void)
{
std::shared_lock<std::shared_mutex> lock(mutexImageStatus_);
return imageStatus_;
}
bool YoloObjectDetector::isNodeRunning(void)
{
std::shared_lock<std::shared_mutex> lock(mutexNodeStatus_);
return isNodeRunning_;
}
void *YoloObjectDetector::publishInThread()
{
#ifdef UNIQUE_FRAMES
static uint32_t prevSeq;
if (prevSeq==headerBuff_[(buffIndex_ + 1)%3].stamp.nanosec) {
return 0;
}
prevSeq = headerBuff_[(buffIndex_ + 1)%3].stamp.nanosec;
#endif
// Publish image.
// cv::Mat cvImage = cv::cvarrToMat(ipl_);
cv::Mat cvImage = disp_;
if (!publishDetectionImage(cv::Mat(cvImage))) {
RCLCPP_DEBUG(get_logger(), "Detection image has not been broadcasted.");
}
// Publish bounding boxes and detection result.
int num = roiBoxes_[0].num;
if (num > 0 && num <= 100) {
for (int i = 0; i < num; i++) {
for (int j = 0; j < numClasses_; j++) {
if (roiBoxes_[i].Class == j) {
rosBoxes_[j].push_back(roiBoxes_[i]);
rosBoxCounter_[j]++;
}
}
}
darknet_ros_msgs::msg::ObjectCount msg;
msg.header.stamp = this->now();
msg.header.frame_id = "detection";
msg.count = num;
objectPublisher_->publish(msg);
for (int i = 0; i < numClasses_; i++) {
if (rosBoxCounter_[i] > 0) {
darknet_ros_msgs::msg::BoundingBox boundingBox;
for (int j = 0; j < rosBoxCounter_[i]; j++) {
int xmin = (rosBoxes_[i][j].x - rosBoxes_[i][j].w / 2) * frameWidth_;
int ymin = (rosBoxes_[i][j].y - rosBoxes_[i][j].h / 2) * frameHeight_;
int xmax = (rosBoxes_[i][j].x + rosBoxes_[i][j].w / 2) * frameWidth_;
int ymax = (rosBoxes_[i][j].y + rosBoxes_[i][j].h / 2) * frameHeight_;
boundingBox.class_id = classLabels_[i];
boundingBox.id = i;
boundingBox.probability = rosBoxes_[i][j].prob;
boundingBox.xmin = xmin;
boundingBox.ymin = ymin;
boundingBox.xmax = xmax;
boundingBox.ymax = ymax;
boundingBoxesResults_.bounding_boxes.push_back(boundingBox);
}
}
}
boundingBoxesResults_.header.stamp = this->now();
boundingBoxesResults_.header.frame_id = "detection";
boundingBoxesResults_.image_header = headerBuff_[(buffIndex_ + 1) % 3];
boundingBoxesPublisher_->publish(boundingBoxesResults_);
} else {
darknet_ros_msgs::msg::ObjectCount msg;
msg.header.stamp = this->now();
msg.header.frame_id = "detection";
msg.count = 0;
objectPublisher_->publish(msg);
}
if (isCheckingForObjects()) {
RCLCPP_DEBUG(get_logger(), "[YoloObjectDetector] check for objects in image.");
auto result = std::make_shared<CheckForObjectsAction::Result>();
result->id = buffId_[0];
result->bounding_boxes = boundingBoxesResults_;
goal_handle_->succeed(result);
action_active_ = false;
}
boundingBoxesResults_.bounding_boxes.clear();
for (int i = 0; i < numClasses_; i++) {
rosBoxes_[i].clear();
rosBoxCounter_[i] = 0;
}
return 0;
}
void YoloObjectDetector::generate_image_cp(image p, cv::Mat& disp) {
int x, y, k;
if (p.c == 3) rgbgr_image(p);
// normalize_image(copy);
int step = disp.step;
for (y = 0; y < p.h; ++y) {
for (x = 0; x < p.w; ++x) {
for (k = 0; k < p.c; ++k) {
disp.data[y * step + x * p.c + k] = (unsigned char)(get_pixel_cp(p, x, y, k) * 255);
}
}
}
}
} /* namespace darknet_ros*/
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.