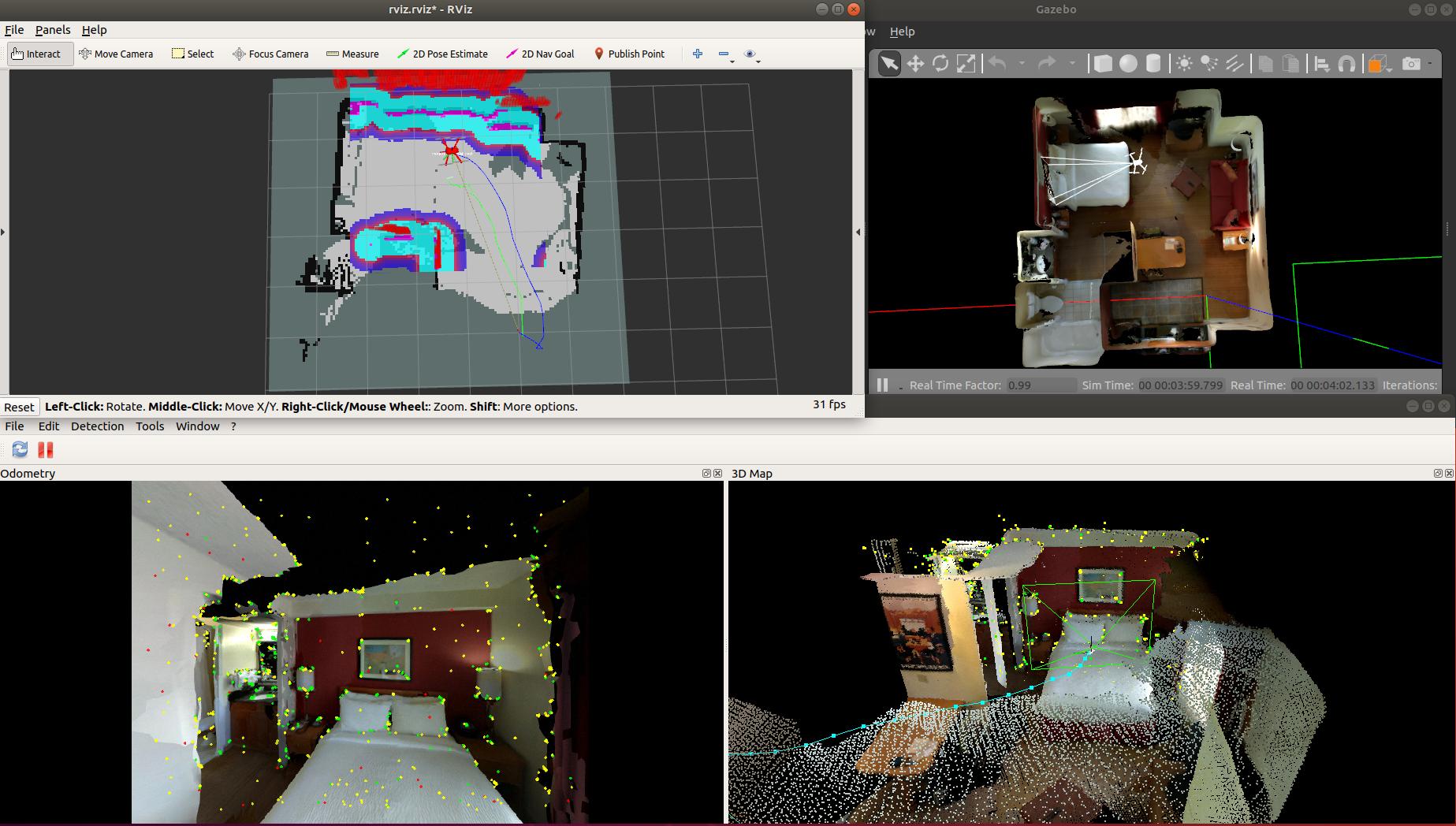
2D navigation example of a drone using move_base with mavros/px4 and rtabmap visual SLAM.
Overview video (click to watch on Youtube):

Tested on ROS Melodic and ROS Noetic with the corresponding PX4 versions below.
sudo apt install \
ros-$ROS_DISTRO-gazebo-dev \
ros-$ROS_DISTRO-joy \
ros-$ROS_DISTRO-imu-complementary-filter \
ros-$ROS_DISTRO-teleop-twist-joy \
ros-$ROS_DISTRO-geographic-msgs \
ros-$ROS_DISTRO-dwa-local-planner \
libgeographic-dev \
geographiclib-tools \
libgstreamer1.0-dev
# May need this on Melodic to avoid error about silt_gazebo
# and gstreamer (https://github.com/PX4/PX4-Autopilot/issues/13117):
sudo apt-get install libgstreamer-plugins-base1.0-dev
# If rtabmap is not already built from source:
sudo apt install ros-$ROS_DISTRO-rtabmap-roscd ~
git clone https://github.com/PX4/PX4-Autopilot.git
cd PX4-Autopilot
git checkout v1.12.3
git submodule update --init --recursive
sudo pip3 install numpy toml packaging jinja2 empy numpy
make px4_sitl_default gazebo
# (do ctrl-c in terminal to close gazebo)
echo "source ~/PX4-Autopilot/Tools/setup_gazebo.bash ~/PX4-Autopilot ~/PX4-Autopilot/build/px4_sitl_default" >> ~/.bashrc
echo "export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot:~/PX4-Autopilot/Tools/sitl_gazebo" >> ~/.bashrc
source ~/.bashrc
cd ~/catkin_ws/src
# To work with PX4/Firmware 1.12.3, mavros 1.8.0 or 1.9.0 releases should be used
# (With mavros master branch there are a lot of "Detected jump back in time" TF errors)
git clone https://github.com/mavlink/mavros.git && cd mavros && git checkout 1.9.0 && cd ..
git clone https://github.com/SyrianSpock/realsense_gazebo_plugin.git
sudo ~/catkin_ws/src/mavros/mavros/scripts/install_geographiclib_datasets.sh
cd ~/catkin_ws
catkin_makeroslaunch rtabmap_drone_example gazebo.launch
roslaunch rtabmap_drone_example slam.launch
roslaunch rtabmap_drone_example rviz.launch
# Arm and take off:
rosrun rtabmap_drone_example offboard
- Manual control: If a joystick is plugged, you can send twists by holding L1 and moving the joysticks. Hold L1+L2 with left joystick down to land (be gentle to land smoothly), then hold left joystick in bottom-right position to disarm after the drone is on the ground.
- Autonomous control: use "2D Nav Goal" button in RVIZ to set a goal to reach