Using emergency maps to help robots save you in emergencies
The goal of this program is described in this blog post and can be summarized by this sentence:
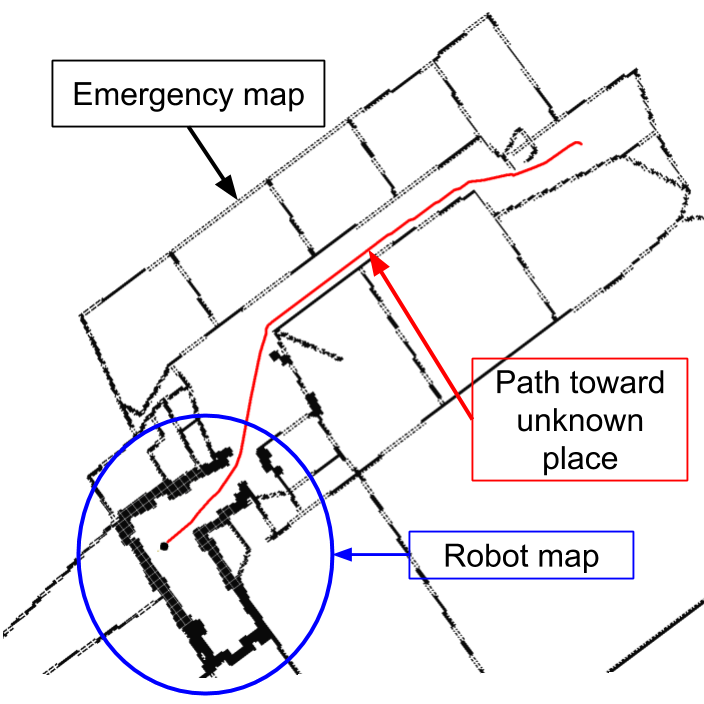
a method to integrate an emergency map into a robot map, so that the robot can plan its way toward places it has not yet explored.
The auto complete graph method is presented in this article on arxiv and on IEEE Xplore. The paper was awarded Best Student Paper Award at SSRR2018 so hopefully you'll enjoy reading it :).
@INPROCEEDINGS{8088137,
author={M. Mielle and M. Magnusson and H. Andreasson and A. J. Lilienthal},
booktitle={2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR)},
title={SLAM auto-complete: Completing a robot map using an emergency map},
year={2017},
volume={},
number={},
pages={35-40},
keywords={SLAM (robots);graph theory;mobile robots;rescue robots;robot vision;SLAM auto-complete;aerial images;emergency map;graph-based SLAM;rescue missions;robot mapping;Buildings;Covariance matrices;Navigation;Simultaneous localization and mapping;Strain;Uncertainty},
doi={10.1109/SSRR.2017.8088137},
ISSN={},
month={Oct},}
This should all be soon ros parameters but for now here is how you can test the code:
-
Use
roslaunch ndt_feature gustav_radar_tf.launchto create the ndt_graph that is going to be processed by the ACG. Modify the file so that it reads your bag file. Use this bag file if your only testing the algorithm. -
The parameters for ACG are loaded from a file. The file is determined by a string in
acg_node_review.cppnamedparameters_for_ACG. An example of parameter file is present inACG_params/param.txt -
Use
rosrun auto_complete_graph acg_node_reviewto run the algorithm. -
In Rviz, one can give an approximation of the position of the prior compared to robot map using the Publish point button. Only two links are needed to initialize.
The class PriorLoaderInterface.hpp is used to load prior image and detected corners. Just inherit from this class to create your own prior loader. See an example in the class basementFull.hpp. This only argument needed for PriorLoaderInterface is the name of the file image where the prior is.
- BetterGraph
- VoDiGrEx
- G2O but please use my fork for now. G2O code base changed in the meantime.
- perception_oru Since the code here getting old and the new version is not available yet, I think this commit 5d6a7f6b6c9e04b4eaadce802c04c6ad8cf23084 should be where they are synchronised
- ndt_feature
- occupancy_grid_utils
- grid_map
- OpenCV
- Eigen
- Boost