PoseNet of "Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image"





This repo is official PyTorch implementation of Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image (ICCV 2019). It contains PoseNet part.
What this repo provides:
- PyTorch implementation of Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image (ICCV 2019).
- Flexible and simple code.
- Compatibility for most of the publicly available 2D and 3D, single and multi-person pose estimation datasets including Human3.6M, MPII, MS COCO 2017, MuCo-3DHP and MuPoTS-3D.
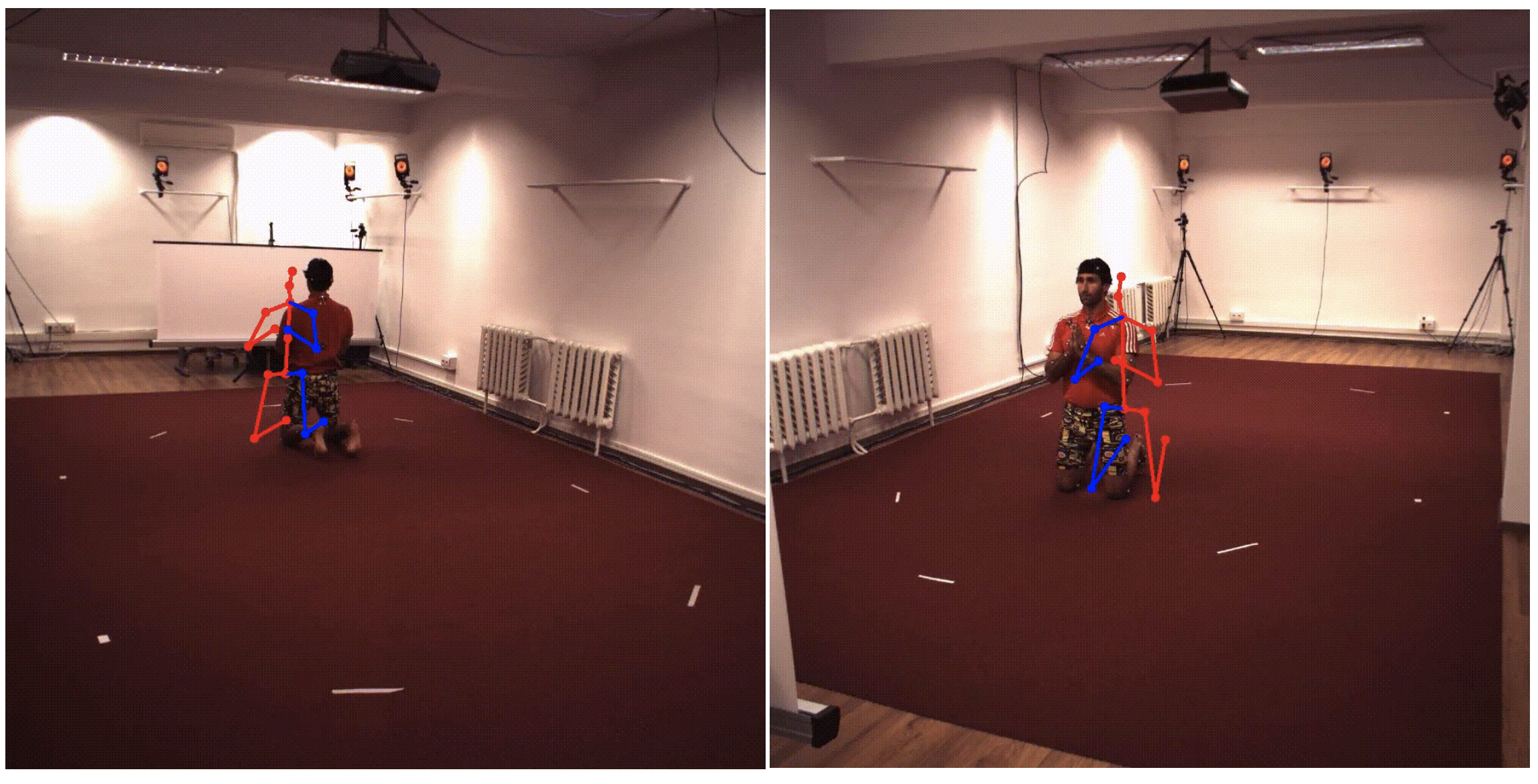
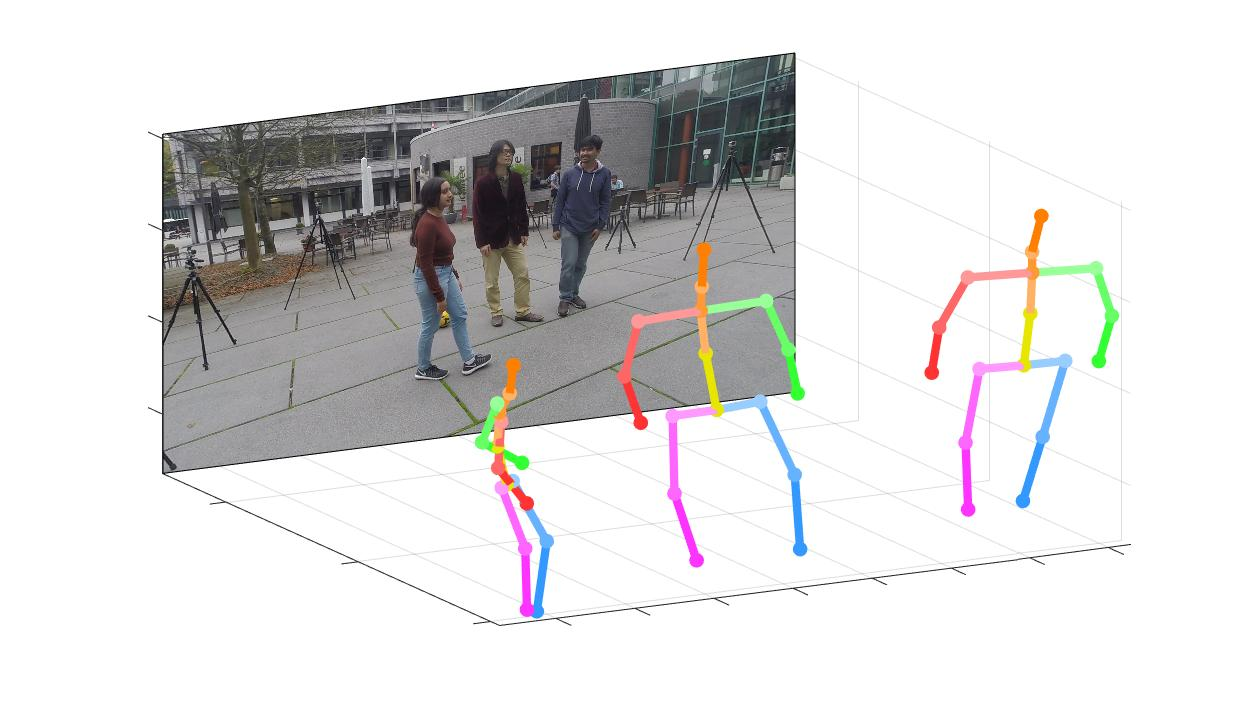
- Human pose estimation visualization code.
This code is tested under Ubuntu 16.04, CUDA 9.0, cuDNN 7.1 environment with two NVIDIA 1080Ti GPUs.
Python 3.6.5 version with Anaconda 3 is used for development.
You can try quick demo at demo folder.
- Download the pre-trained PoseNet in here.
- Prepare
input.jpgand pre-trained snapshot atdemofolder. - Set
bbox_listat here. - Set
root_depth_listat here. - Run
python demo.py --gpu 0 --test_epoch 24if you want to run on gpu 0. - You can see
output_pose_2d.jpgand new window that shows 3D pose.
The ${POSE_ROOT} is described as below.
${POSE_ROOT}
|-- data
|-- demo
|-- common
|-- main
|-- tool
|-- vis
`-- output
datacontains data loading codes and soft links to images and annotations directories.democontains demo codes.commoncontains kernel codes for 3d multi-person pose estimation system.maincontains high-level codes for training or testing the network.toolcontains data pre-processing codes. You don't have to run this code. I provide pre-processed data below.viscontains scripts for 3d visualization.outputcontains log, trained models, visualized outputs, and test result.
You need to follow directory structure of the data as below.
${POSE_ROOT}
|-- data
| |-- Human36M
| | |-- bbox_root
| | | |-- bbox_root_human36m_output.json
| | |-- images
| | |-- annotations
| |-- MPII
| | |-- images
| | |-- annotations
| |-- MSCOCO
| | |-- bbox_root
| | | |-- bbox_root_coco_output.json
| | |-- images
| | | |-- train2017
| | | |-- val2017
| | |-- annotations
| |-- MuCo
| | |-- data
| | | |-- augmented_set
| | | |-- unaugmented_set
| | | |-- MuCo-3DHP.json
| |-- MuPoTS
| | |-- bbox_root
| | | |-- bbox_mupots_output.json
| | |-- data
| | | |-- MultiPersonTestSet
| | | |-- MuPoTS-3D.json
- Download Human3.6M parsed data [data]
- Download MPII parsed data [images][annotations]
- Download MuCo parsed and composited data [data]
- Download MuPoTS parsed data [images][annotations]
- All annotation files follow MS COCO format.
- If you want to add your own dataset, you have to convert it to MS COCO format.
To download multiple files from Google drive without compressing them, try this. If you have a problem with 'Download limit' problem when tried to download dataset from google drive link, please try this trick.
* Go the shared folder, which contains files you want to copy to your drive
* Select all the files you want to copy
* In the upper right corner click on three vertical dots and select “make a copy”
* Then, the file is copied to your personal google drive account. You can download it from your personal account.
You need to follow the directory structure of the output folder as below.
${POSE_ROOT}
|-- output
|-- |-- log
|-- |-- model_dump
|-- |-- result
`-- |-- vis
- Creating
outputfolder as soft link form is recommended instead of folder form because it would take large storage capacity. logfolder contains training log file.model_dumpfolder contains saved checkpoints for each epoch.resultfolder contains final estimation files generated in the testing stage.visfolder contains visualized results.
- Run
$DB_NAME_img_name.pyto get image file names in.txtformat. - Place your test result files (
preds_2d_kpt_$DB_NAME.mat,preds_3d_kpt_$DB_NAME.mat) insingleormultifolder. - Run
draw_3Dpose_$DB_NAME.m
- In the
main/config.py, you can change settings of the model including dataset to use, network backbone, and input size and so on.
In the main folder, run
python train.py --gpu 0-1to train the network on the GPU 0,1.
If you want to continue experiment, run
python train.py --gpu 0-1 --continue--gpu 0,1 can be used instead of --gpu 0-1.
Place trained model at the output/model_dump/.
In the main folder, run
python test.py --gpu 0-1 --test_epoch 20to test the network on the GPU 0,1 with 20th epoch trained model. --gpu 0,1 can be used instead of --gpu 0-1.
Here I report the performance of the PoseNet.
- Download pre-trained models of the PoseNetNet in here
- Bounding boxs (from DetectNet) and root joint coordintates (from RootNet) of Human3.6M, MSCOCO, and MuPoTS-3D dataset in here.
For the evaluation, you can run test.py or there are evaluation codes in Human36M.

For the evaluation, you can run test.py or there are evaluation codes in Human36M.

For the evaluation, run test.py. After that, move data/MuPoTS/mpii_mupots_multiperson_eval.m in data/MuPoTS/data. Also, move the test result files (preds_2d_kpt_mupots.mat and preds_3d_kpt_mupots.mat) in data/MuPoTS/data. Then run mpii_mupots_multiperson_eval.m with your evaluation mode arguments.

We additionally provide estimated 3D human root coordinates in on the MSCOCO dataset. The coordinates are in 3D camera coordinate system, and focal lengths are set to 1500mm for both x and y axis. You can change focal length and corresponding distance using equation 2 or equation in supplementarial material of my paper.
@InProceedings{Moon_2019_ICCV_3DMPPE,
author = {Moon, Gyeongsik and Chang, Juyong and Lee, Kyoung Mu},
title = {Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image},
booktitle = {The IEEE Conference on International Conference on Computer Vision (ICCV)},
year = {2019}
}