rickymexx / yocto-gl-vpt Goto Github PK
View Code? Open in Web Editor NEWVolumetric Path Tracing support for Yocto/GL Library
Home Page: https://rickymexx.github.io/yocto-gl-vpt
License: MIT License
Volumetric Path Tracing support for Yocto/GL Library
Home Page: https://rickymexx.github.io/yocto-gl-vpt
License: MIT License









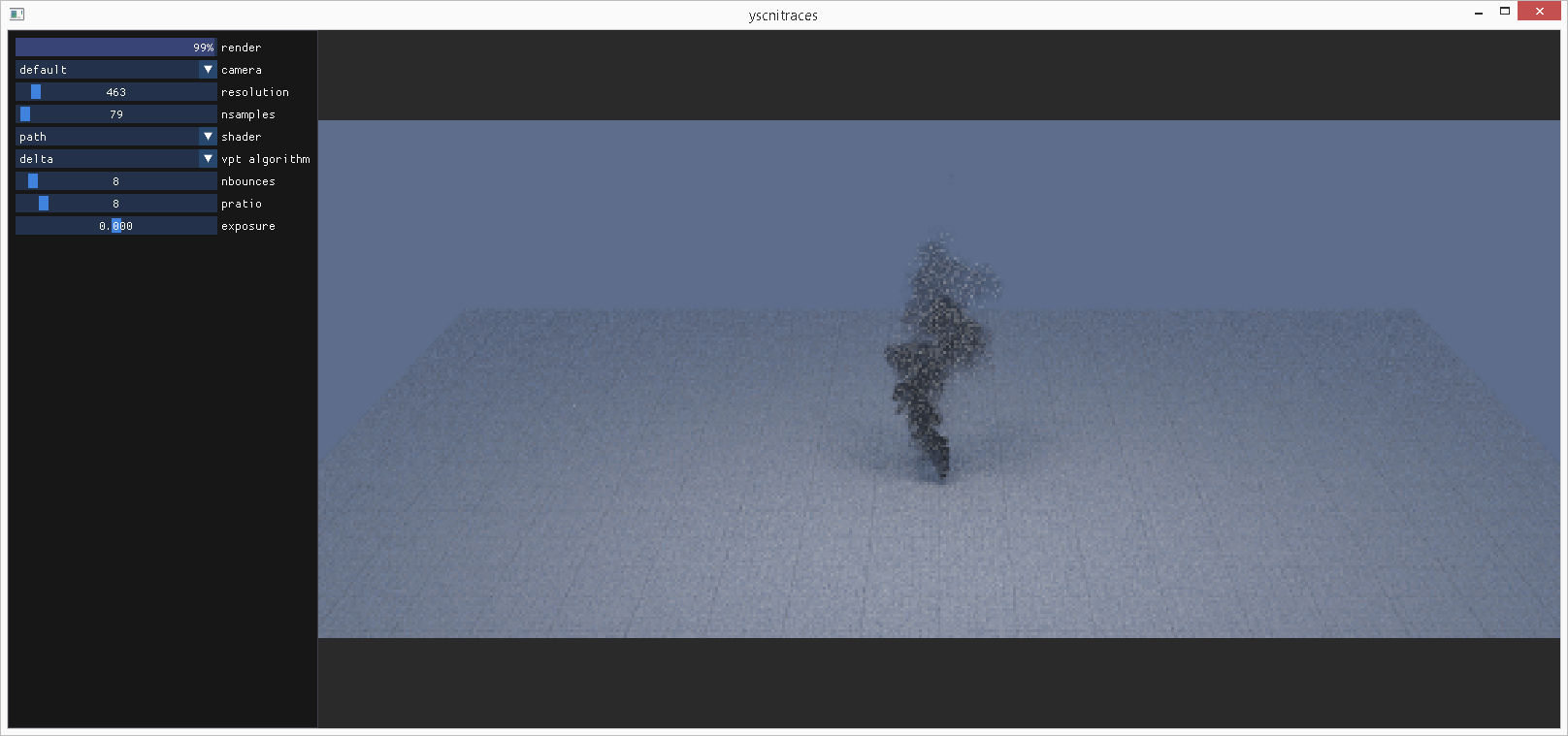
I suspect that the implementation of spectral tracking is wrong. I have a smoke medium with 20% scattering and 80% absorption.
With delta tracking, I get this result.
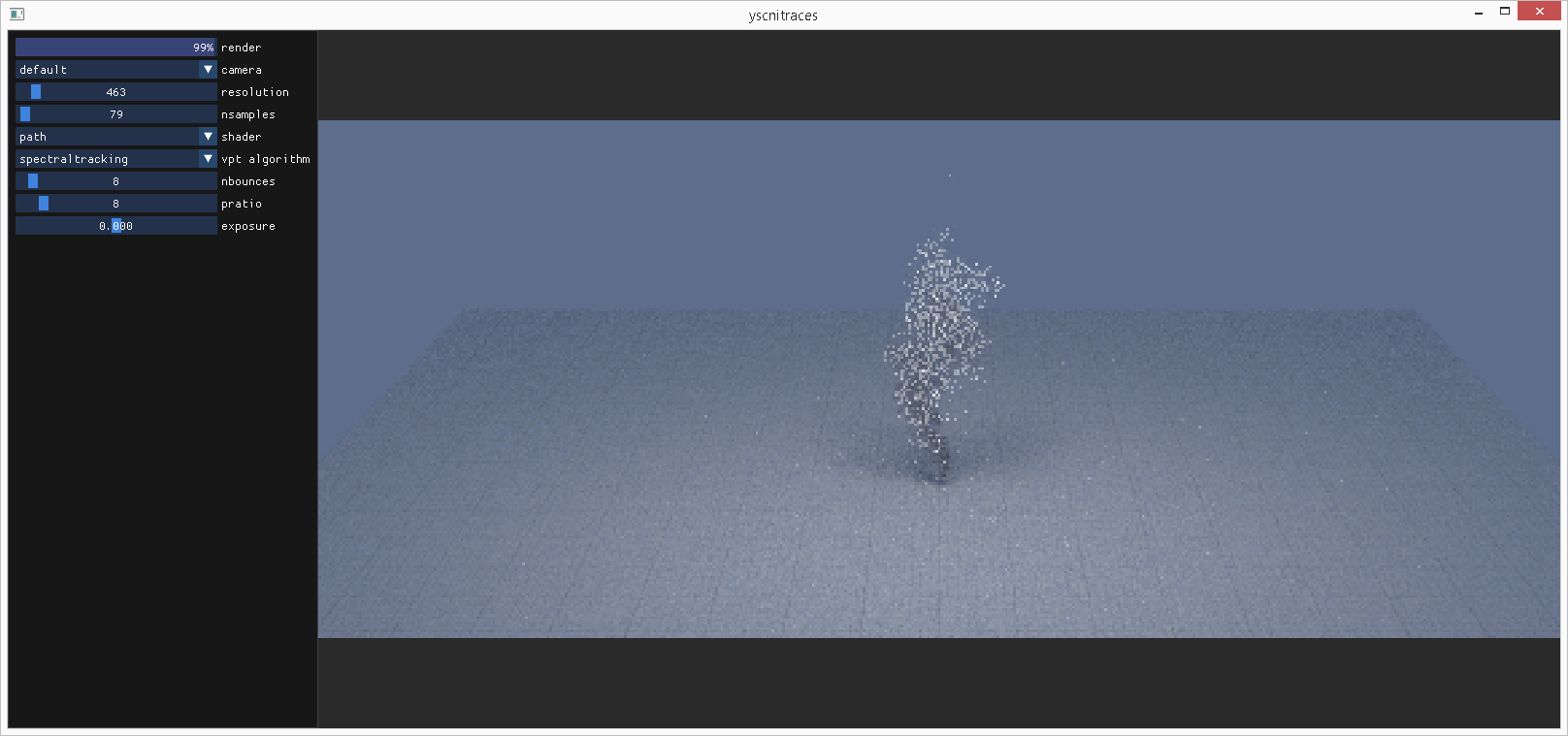
but spectral tracking gives me this result which is clearly wrong as I should get similar result as delta tracking.
I have managed to fix it. Following is my code which is as per the original spectral decomposition paper.
std::pair<float, vec3f> eval_spectral_tracking(vsdf& vsdf, float max_distance, rng_state& rng, const ray3f& ray) {
auto object = vsdf.object;
auto density_vol = object->density_vol;
auto emission_vol = object->emission_vol;
auto max_density = density_vol->max_voxel * object->density_mult;
auto majorant_density = max_density;
auto imax_density = 1.0f / max_density;
auto path_length = 0.0f;
auto tr = vec3f(1);
auto f = vec3f(1);
auto sigma_s = vsdf.scatter * max_density;
auto Ps = sigma_s * imax_density;
while (true) {
path_length -= log(1 - rand1f(rng)) * imax_density;
if (path_length >= max_distance)
break;
auto current_pos = ray.o + path_length * ray.d;
auto sigma_t = vec3f(eval_vpt_density(vsdf, current_pos));
auto sigma_n = majorant_density - sigma_t;
auto sigma_a = sigma_t - sigma_s;
auto Pt = sigma_t * imax_density;
auto Pn = sigma_n * imax_density;
auto Pa = 1.0 - Ps - Pn;
auto contrib = zero3f;
tr *= exp(-sigma_t*path_length);
if (max(Pa) > rand1f(rng)) { //ABSORPTION
contrib = sigma_a / (majorant_density * Pa);
contrib /= max(contrib);
vsdf.event = EVENT_ABSORB;
vsdf.density = sigma_t;
return { path_length, tr * contrib };
}
else if (max(Pt) > rand1f(rng)) { // SCATTER
contrib = sigma_s / (majorant_density * Ps);
contrib /= max(contrib);
vsdf.event = EVENT_SCATTER;
vsdf.density = sigma_t;
return { path_length, tr * contrib };
}
contrib = sigma_n;
contrib /= max(contrib);
f *= contrib;
}
return { max_distance, f };
}
Following is the correct output.

Slight issues in the spectral MIS code. The original code treats both absorption and scattering the same as follows
if (e == EVENT_ABSORB || e == EVENT_SCATTER) {
vsdf.event = e;
vsdf.density = sigma_t;
f *= tr;
break;
}
and returns path_length, f/mean(p) for both these case. However, as per algorithm 1 in the original paper, the division is to be carried out for absorption only.
EDIT: I have made these changes and tried to reduce branches as much and following is my code. It gives the same output as the original function but its slightly faster.
std::pair<float, vec3f> eval_unidirectional_spectral_mis(vsdf& vsdf, float max_distance,
rng_state& rng, const ray3f& ray) {
auto object = vsdf.object;
auto density_vol = object->density_vol;
auto emission_vol = object->emission_vol;
auto max_density = density_vol->max_voxel * object->density_mult;
auto imax_density = 1.0f / max_density;
auto path_length = 0.0f;
auto f = vec3f(1);
auto p = vec3f(1);
auto cc = clamp((int)(rand1f(rng) * 3), 0, 2);
auto current_pos = ray.o;
auto majorant_density = max_density;
auto tr = vec3f(1);
while (true) {
path_length -= majorant_density == 0.0f ? -flt_max : log(1 - rand1f(rng)) / majorant_density;
if (path_length >= max_distance)
break;
current_pos = ray.o + path_length * ray.d;
auto sigma_t = vec3f(eval_vpt_density(vsdf, current_pos));
auto sigma_s = sigma_t * vsdf.scatter;
auto sigma_a = sigma_t - sigma_s;
auto sigma_n = vec3f(max_density) - sigma_t;
vec3f sigma[3] = { sigma_n, sigma_s, sigma_a };
tr *= exp(-sigma_t * path_length);
// Sample event
auto e = sample_event(sigma_a[cc] * imax_density, sigma_s[cc] * imax_density, sigma_n[cc] * imax_density, rand1f(rng));
if (e == EVENT_NULL)
continue;
f *= sigma[e];
p = f;
// Populate vsdf with medium interaction information and return
vsdf.event = e;
vsdf.density = sigma_t;
f *= tr;
f = f / mean(p);
break;
}
return {path_length, f };
}
HI thanks for sharing your work. I tried to add openvdb support using yovdbload but it fails to load the openvdb datasets available here. I managed to load the data myself using the latest openvdb library. Here is my code to get the openvdb data loaded using the openvdb library and dump in a bin file.
#include <yocto/yocto_cli.h>
#include <yocto/yocto_math.h>
#include <yocto/yocto_trace.h>
#include <yocto/yocto_image.h>
//openvdb includes
#include <openvdb/openvdb.h>
#include <iostream>
using namespace yocto;
static inline bool save_yvol(
const char* filename, int w, int h, int d, int nc, const float* voxels) {
FILE* fp;
fopen_s(&fp, filename, "wb");
if (!fp) return false;
auto fs_guard = std::unique_ptr<FILE, void (*)(FILE*)>{
fp, [](FILE* f) { fclose(f); } };
if (fprintf(fp, "YVOL\n") < 0) return false;
if (fprintf(fp, "%d %d %d %d\n", w, h, d, nc) < 0) return false;
auto nvalues = (size_t)w * (size_t)h * (size_t)d * (size_t)nc;
if (fwrite(voxels, sizeof(float), nvalues, fp) != nvalues) return false;
return true;
}
int main(int argc, char** argv)
{
if (argc != 2)
{
std::cout << "Usage: TestOpenVDB.exe [OpenVDB filename]" << std::endl;
}
else
{
openvdb::initialize();
openvdb::io::File file(argv[1]);
file.open();
openvdb::GridBase::Ptr baseGrid;
for (openvdb::io::File::NameIterator nameIter = file.beginName(); nameIter != file.endName(); ++nameIter)
{
if (nameIter.gridName() == "density")
{
baseGrid = file.readGrid(nameIter.gridName());
}
else
{
std::cout << "Ignoring Grid: " << nameIter.gridName() << std::endl;
}
}
openvdb::FloatGrid::Ptr grid = openvdb::gridPtrCast<openvdb::FloatGrid>(baseGrid);
int min_x = 10000;
int min_y = 10000;
int min_z = 10000;
int max_x = -10000;
int max_y = -10000;
int max_z = -10000;
// Print all active ("on") voxels by means of an iterator.
for (openvdb::FloatGrid::ValueOnCIter iter = grid->cbeginValueOn(); iter; ++iter)
{
openvdb::Coord xyz = iter.getCoord();
min_x = min(min_x, xyz.x());
min_y = min(min_y, xyz.y());
min_z = min(min_z, xyz.z());
max_x = max(max_x, xyz.x());
max_y = max(max_y, xyz.y());
max_z = max(max_z, xyz.z());
}
file.close();
std::cout << "Input: " << argv[1] << std::endl;
std::cout << "BB bounds: (" << min_x << ", " << min_y << ", " << min_z << ")" << std::endl;
std::cout << "BB bounds: (" << max_x << ", " << max_y << ", " << max_z << ")" << std::endl;
min_x = fabs(min_x);
min_y = fabs(min_y);
min_z = fabs(min_z);
max_x = max_x + min_x + 1;
max_y = max_y + min_y + 1;
max_z = max_z + min_z + 1;
std::cout << "BB bounds after shift: (" << max_x << ", " << max_y << ", " << max_z << ")" << std::endl;
std::vector<float> odata(max_x * max_y * max_z, 0.0f);
for (openvdb::FloatGrid::ValueOnCIter iter = grid->cbeginValueOn(); iter; ++iter)
{
openvdb::Coord xyz = iter.getCoord();
odata[(xyz.z() + min_z) * max_y * max_x + (xyz.y() + min_y) * max_x + (xyz.x() + min_x)] = *iter;
}
std::string output = argv[1];
output = output.substr(0, output.find_last_of(".")) + ".bin";
save_yvol(output.c_str(), max_x, max_y, max_z, 1, odata.data());
std::cout << "Volume file saved ["<< output << "]";
}
return 0;
}
I was wondering why cant we simply load the openvdb file directly instead of generating an intermediate (.bin) file? I notice that openvdb data is highly compressed so we can sort of uncompress data from openvdb on demand before handing it to yocto pathtracer?
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.