Comments (11)
 robin-shaun
commented on May 28, 2024
1
robin-shaun
commented on May 28, 2024
1
Hello, I have just upgraded the version of px4 and done a lot of modification for XTDrone, but some demos are still waiting to be modified. I will complete the modification in several days.
from xtdrone.
robin-shaun
commented on May 28, 2024
1
Hello, the manual is OK now. You can test it.
from xtdrone.
robin-shaun
commented on May 28, 2024
1
hello, it's a bug and I have solved it.
<frameName>laser_2d</frameName> in XTDrone/sitl_config/models/hokuyo_lidar/model.sdf,
previously, it's laser.
from xtdrone.
robin-shaun
commented on May 28, 2024
1
odom and map is connected by gmapping, not by laser scan matcher
from xtdrone.
 saengphet
commented on May 28, 2024
saengphet
commented on May 28, 2024
Hello, I have just upgraded the version of px4 and done a lot of modification for XTDrone, but some demos are still waiting to be modified. I will complete the modification in several days.
Thank you so much for your very fast response. I am looking forward to testing a modified version. I am going to test other tutorials.
from xtdrone.
saengphet
commented on May 28, 2024
Hello, the manual is OK now. You can test it.
Hello! Thank you for your update. Unfortunately, I have already tested the newest and still got errors as follows
Firstly, I run "roslaunch px4 indoor3.launch", after that I got many warning messages as
"Warning [parser.cc:950] XML Element[friction], child of element[collision] not defined in SDF. Ignoring[friction]. You may have an incorrect SDF file, or an sdformat version that doesn't support this element." However, the gazebo simulation looks fine, nothing different from the tutorial

Secondly, I run "roslaunch laser_scan_matcher matcher.launch" in another terminal, I got error messages
"[ WARN] [1590852379.820397259, 179.096000000]: Could not get initial transform from base to laser frame, "iris_0/laser" passed to lookupTransform argument source_frame does not exist.
"

Next, check rqt tf tree and rqt graph, I got something different from the tutorial.


from xtdrone.
saengphet
commented on May 28, 2024
hello, it's a bug and I have solved it.
<frameName>laser_2d</frameName>in XTDrone/sitl_config/models/hokuyo_lidar/model.sdf,
previously, it's laser.
Hello, iris_0/laser_2d is OK for now, next is "No transform from [map] to frame [odom]" and "No transform from [map_ned] to frame [odom]"

After "roslaunch laser_scan_matcher matcher_gmapping.launch" I got error as:
SUMMARY
PARAMETERS
- /laser_scan_matcher_node/base_frame: iris_0/base_link
- /laser_scan_matcher_node/fixed_frame: odom
- /laser_scan_matcher_node/max_iterations: 10
- /laser_scan_matcher_node/use_imu: False
- /laser_scan_matcher_node/use_odom: False
- /rosdistro: kinetic
- /rosversion: 1.12.14
- /slam_gmapping/angularUpdate: 0.5
- /slam_gmapping/astep: 0.15
- /slam_gmapping/base_frame: iris_0/base_link
- /slam_gmapping/delta: 0.02
- /slam_gmapping/iterations: 1
- /slam_gmapping/kernelSize: 1
- /slam_gmapping/lasamplerange: 0.05
- /slam_gmapping/lasamplestep: 0.05
- /slam_gmapping/linearUpdate: 1.0
- /slam_gmapping/llsamplerange: 0.01
- /slam_gmapping/llsamplestep: 0.05
- /slam_gmapping/lsigma: 0.1
- /slam_gmapping/lskip: 1
- /slam_gmapping/lstep: 0.15
- /slam_gmapping/map_udpate_interval: 1.0
- /slam_gmapping/maxUrange: 5.0
- /slam_gmapping/ogain: 3.0
- /slam_gmapping/particles: 10
- /slam_gmapping/resampleThreshold: 0.5
- /slam_gmapping/sigma: 0.1
- /slam_gmapping/srr: 0.1
- /slam_gmapping/srt: 0.2
- /slam_gmapping/str: 0.1
- /slam_gmapping/stt: 0.2
- /slam_gmapping/temporalUpdate: 0.4
- /slam_gmapping/xmax: 5.0
- /slam_gmapping/xmin: -5.0
- /slam_gmapping/ymax: 5.0
- /slam_gmapping/ymin: -5.0
- /use_sim_time: True
NODES
/
laser_scan_matcher_node (laser_scan_matcher/laser_scan_matcher_node)
rviz (rviz/rviz)
slam_gmapping (gmapping/slam_gmapping)
ROS_MASTER_URI=http://localhost:11311
process[rviz-1]: started with pid [8207]
process[laser_scan_matcher_node-2]: started with pid [8208]
ERROR: cannot launch node of type [gmapping/slam_gmapping]: gmapping
[ INFO] [1590896175.041331942]: Starting LaserScanMatcher
[ WARN] [1590896176.260677314, 1062.132000000]: Could not get initial transform from base to laser frame, Lookup would require extrapolation into the past. Requested time 1061.124000000 but the earliest data is at time 1061.168000000, when looking up transform from frame [iris_0/laser_2d] to frame [iris_0/base_link]
[ WARN] [1590896176.260739079, 1062.132000000]: Skipping scan
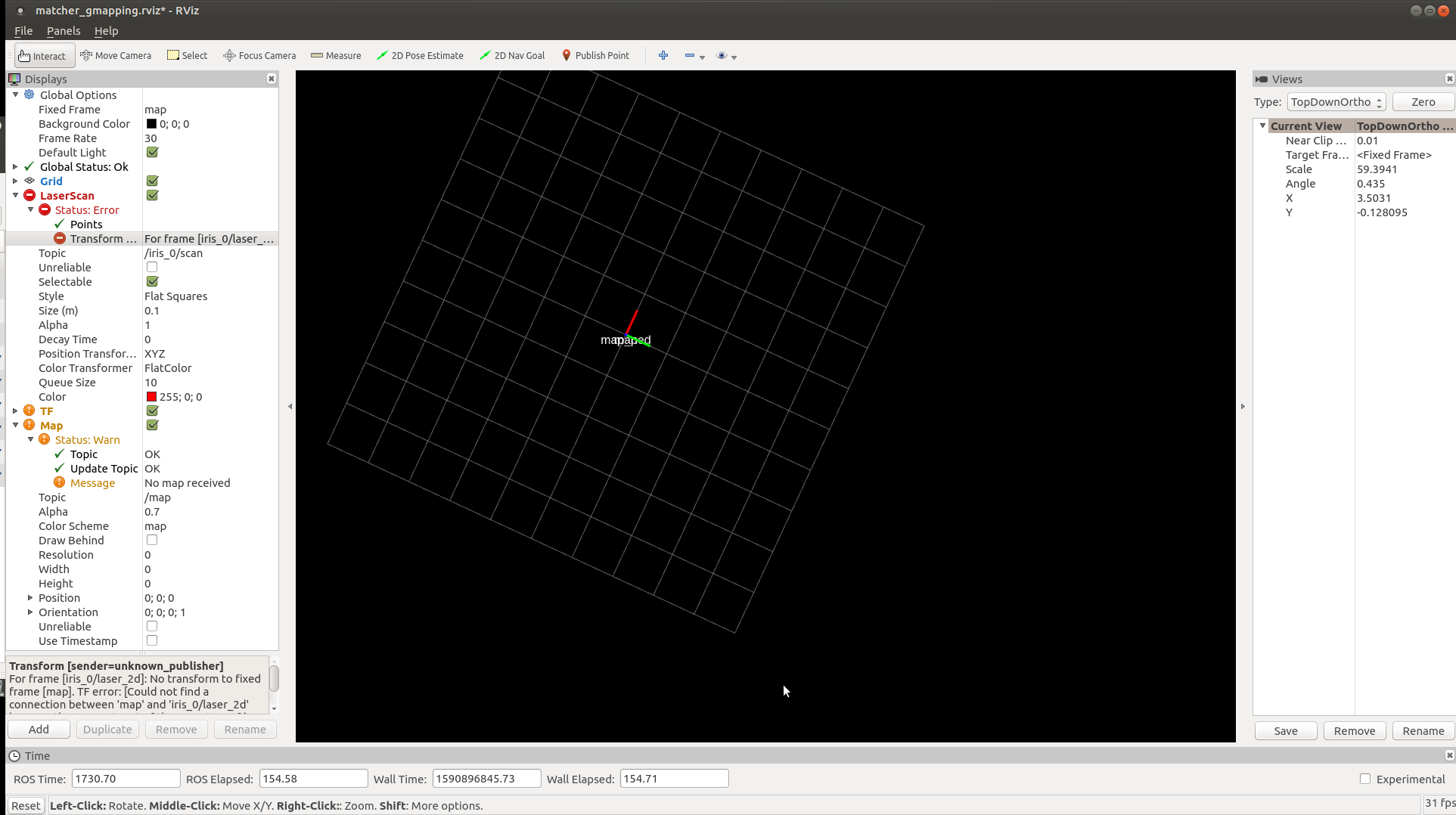
from xtdrone.
saengphet
commented on May 28, 2024
Hi, Now it works fine after installed "sudo apt-get install ros-kinetic-slam-gmapping". It's my fault. Thank you !

from xtdrone.
robin-shaun
commented on May 28, 2024
ok
from xtdrone.
 zhulei991113
commented on May 28, 2024
zhulei991113
commented on May 28, 2024
嗨,现在,在安装“ sudo apt-get install ros-kinetic-slam-gmapping”后,它可以正常工作。我的错。谢谢 !
hello!I am very happy seeing your comments and result.i have a same print
however,i want to ask you for help
class TF in rviz ,have many warning......though map and others are ok
additionally,after output "python laser_transfer.py iris 0 2d",the px4 can print :
INFO [ecl/EKF] 19804000: reset position to ev position
INFO [ecl/EKF] 19804000: commencing external vision position fusion
INFO [ecl/EKF] 19804000: commencing external vision yaw fusion
?
from xtdrone.
saengphet
commented on May 28, 2024
@zhulei991113 Hi, after script "python laser_transfer.py iris 0 2d" is executed then the external position from ROS will be sent to px4 state estimation (EKF2). The INFO is telling us that PX4 is received the external position (using vision pipeline). Some of TF there is no link between each other (such as base_link_frd and map). However, it is fine because the important frames are linked together.
from xtdrone.
Related Issues (20)
- 是换用yolov5了吗> 解决了吗哥们,我也遇到了这个问题 HOT 1
- AttributeError: module 'em' has no attribute 'RAW_OPT' HOT 1
- 老师好,我在下好XTDrone源码后第二次编译一直提醒Livox_mid40缺少model.config请问该怎么解决呢?
- 您好!运行VINS-fusion时,仿真环境飞机图像和imu话题都有数据,但是vins-fusion相关的话题都没有数据 HOT 6
- 文档中的旋翼模型公式与代码不匹配 HOT 1
- 固定翼通信报错WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported HOT 2
- 固定翼无人机编队跟踪无人车参考文献
- 使用固定翼仿真时无人机解锁但不起飞
- 二次编译后PX4和mavros连接不成功
- 请问编译PX4时,出现这个问题,一直卡在这里怎么解决 HOT 3
- mavros_posix_sitl.launch HOT 1
- 在修改sitl_gazebo中的gazebo_gimbal_controller_plugin.cpp后再次编译时报错 HOT 4
- 配置VINS-Fusion的时候报错/usr/bin/ld: cannot find -lpose_utils HOT 1
- 运行qgc报错A second instance of QGroundControl is already running. Please close the other instance and try again.
- try to get gazibo visualation simulator with drone
- 请问可以释放训练好的YOLO权重吗 HOT 1
- 加速度bias过大超过0.4,重启电脑也没用,怎么解决,急
- git checkout -b xtdrone/dev v1.11.0-beta1失败该怎么做呢
- 在Ubuntu20.04+ROS-noetic下学习XTDrone使用文档中“二维激光SLAM(HectorSLAM)”项目时,完全按照教程操作,遇到了tf树和文档不一致的情况 HOT 1
- 编译运行后gazebo中没有飞机模型出现(已解决) HOT 3
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from xtdrone.