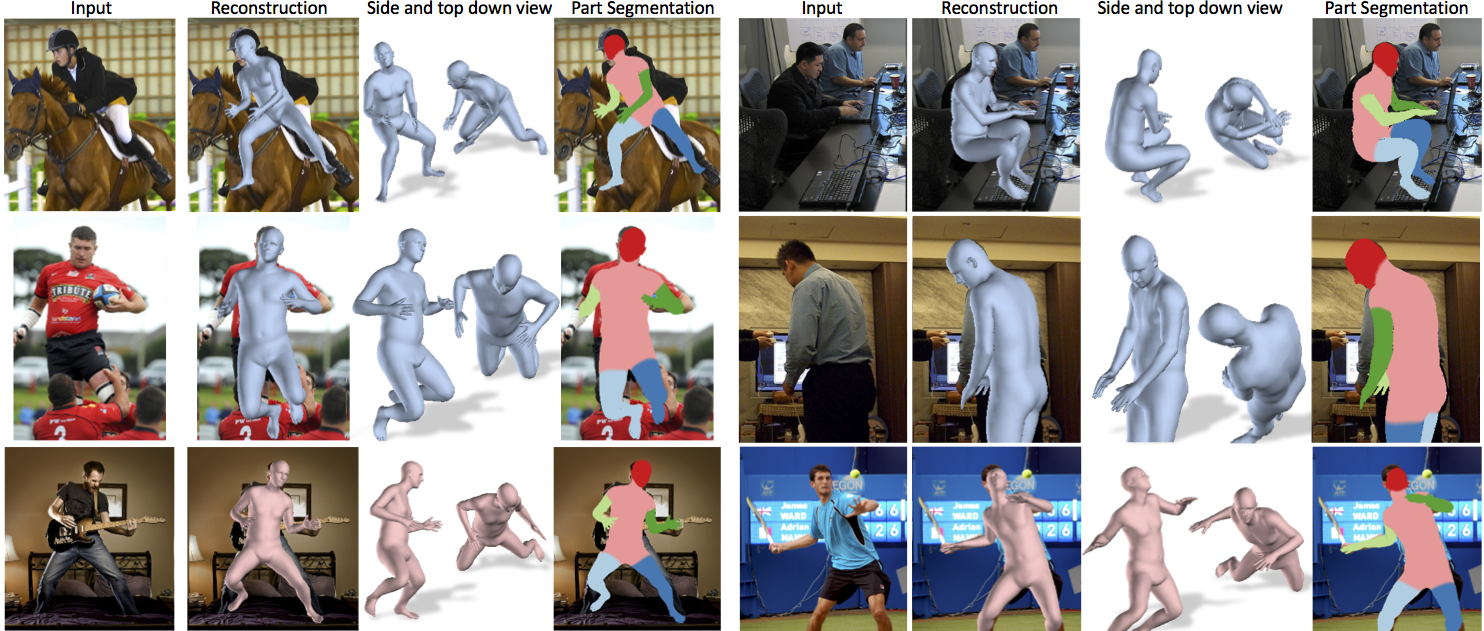
Angjoo Kanazawa, Michael J. Black, David W. Jacobs, Jitendra Malik CVPR 2018
- Python 2.7
- TensorFlow tested on version 1.3, demo alone runs with TF 1.12
virtualenv venv_hmr
source venv_hmr/bin/activate
pip install -U pip
deactivate
source venv_hmr/bin/activate
pip install -r requirements.txt
With GPU:
pip install tensorflow-gpu==1.3.0
Without GPU:
pip install tensorflow==1.3.0
This is only partialy tested.
conda env create -f hmr.yml
https://github.com/mattloper/chumpy/tree/db6eaf8c93eb5ae571eb054575fb6ecec62fd86d
- Download the pre-trained models
wget https://people.eecs.berkeley.edu/~kanazawa/cachedir/hmr/models.tar.gz && tar -xf models.tar.gz
- Run the demo
python -m demo --img_path data/coco1.png
python -m demo --img_path data/im1954.jpg
Images should be tightly cropped, where the height of the person is roughly 150px.
On images that are not tightly cropped, you can run
openpose and supply
its output json (run it with --write_json option).
When json_path is specified, the demo will compute the right scale and bbox center to run HMR:
python -m demo --img_path data/random.jpg --json_path data/random_keypoints.json
(The demo only runs on the most confident bounding box, see src/util/openpose.py:get_bbox)
- Download pre-trained models like above.
- Run webcam Demo
- Run the demo
python -m demo --img_path data/coco1.png
python -m demo --img_path data/im1954.jpg
Please see the doc/train.md!
If you use this code for your research, please consider citing:
@inProceedings{kanazawaHMR18,
title={End-to-end Recovery of Human Shape and Pose},
author = {Angjoo Kanazawa
and Michael J. Black
and David W. Jacobs
and Jitendra Malik},
booktitle={Computer Vision and Pattern Recognition (CVPR)},
year={2018}
}
russoale has created a Python 3 version with TF 2.0: https://github.com/russoale/hmr2.0
Dawars has created a docker image for this project: https://hub.docker.com/r/dawars/hmr/
MandyMo has implemented a pytorch version of the repo: https://github.com/MandyMo/pytorch_HMR.git
Dene33 has made a .ipynb for Google Colab that takes video as input and returns .bvh animation! https://github.com/Dene33/video_to_bvh



layumi has added a 2D-to-3D color mapping function to the final obj: https://github.com/layumi/hmr

I have not tested them, but the contributions are super cool! Thank you!! Let me know if you have any mods that you would like to be added here!

















































































































































































