![]()
- Project
LEOGPS
- Github
- Documents
- Version
1.3 (Latest)
- Author
Samuel Y. W. Low
LEOGPS is an open-source Python software which performs relative satellite navigation between two formation flying satellites in low Earth orbit (LEO), with the objective of high accuracy relative positioning via double differential GPS. It uses a TKinter GUI to assist in processing your GPS measurements, and also provides a number of well documented functions, with minimal external package dependencies, useful for your processing (see advanced references in the documentation).
LEOGPS is not a PyPI packaged Python project. There is no installation possible through "pip" or via "conda" for Anaconda users. Simply performing a git clone of this repository is all you need to get started.
LEOGPS currently supports only observations from the GPS constellation (L1/L2 frequency), with observation files in RINEX v2.XX format. LEOGPS also uses the precise ephemeris (.EPH) and clock bias and drift files (.CLK) provided by the University of Bern, Center for Orbit Determination in Europe (CODE). As such, the coordinate frame used in the relative positioning is the International Terrestrial Reference Frame (ITRS) which is an Earth-Centered Earth-Fixed (ECEF) frame. Since the ephemeris files and RINEX v2 observations default to GPS Time, it is very important to also note that the time scale used in LEOGPS output files is GPS Time (as opposed to UTC).
This project also gives sincere appreciation and credit to the University of Bern, for their provision of the CODE FTP.
First, clone this repository by running in your terminal (or Git Bash):
git clone https://github.com/sammmlow/LEOGPS.gitSecond, you should do a pip install in your terminal (or Anaconda prompt) of Martin Valgur's Pythonic translation of Hatanaka (de)compression in Python as well as the ncompress library by running:
pip install hatanakapip install ncompressThe Hatanaka library in Python was contributed in v1.1, and replaces the older "RNX2CRX" (and GZIP, thanks to the ncompress library) which are Windows-only executables, making the (de)compression possible across all platforms.
The user can then run the application by running 'leogps.py', in the main directory, and you should see the LEOGPS GUI launch:
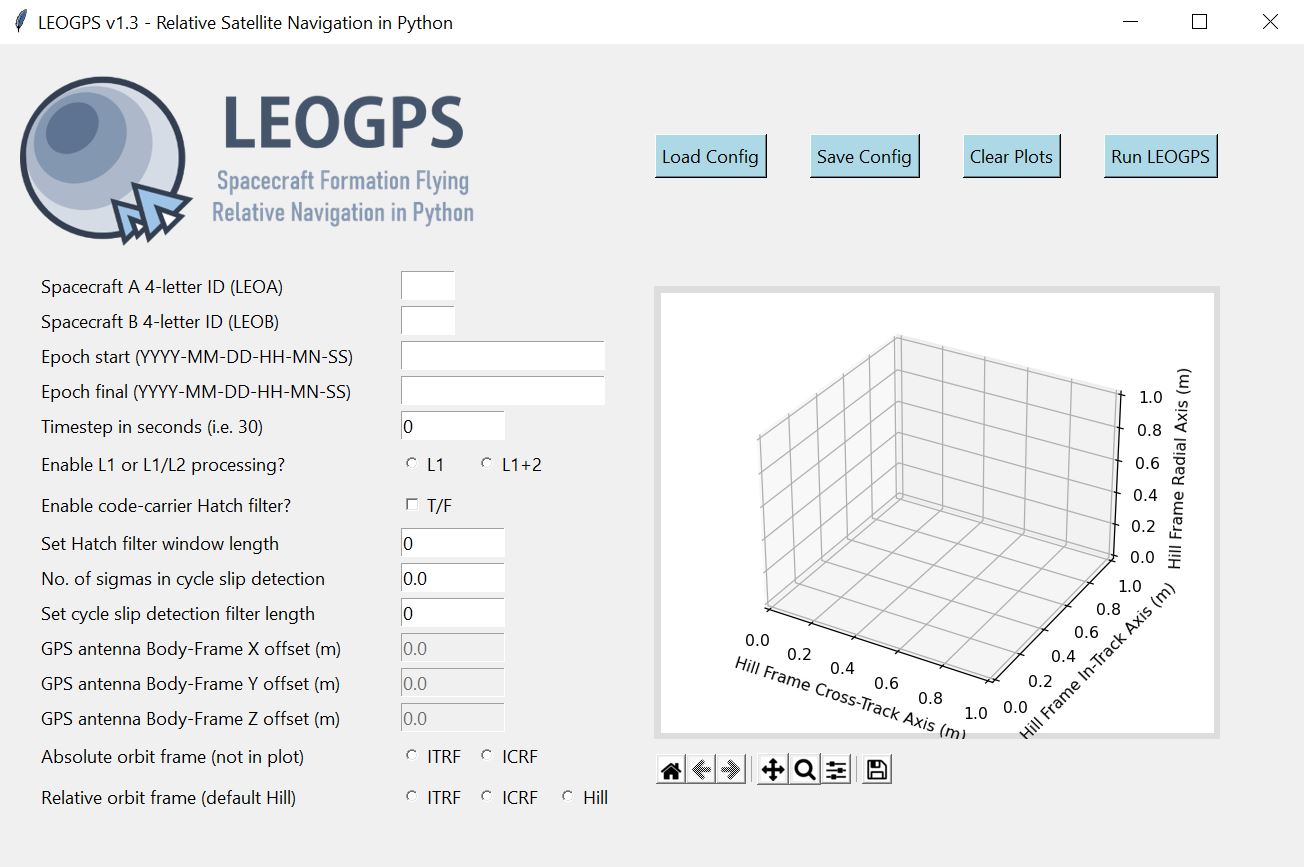
Next, you can paste the two RINEX observation files of your LEO satellite pairs in the inputs folder, key in your configuration parameters, and hit the 'Run LEOGPS' button. That's it! LEOGPS will automatically source for the precise daily ephemeris and clock solutions, and process the raw GPS measurements to produce a report file in "LEOGPS_Results.txt" comprising:
- The single point positions and velocities of both LEOs.
- Precise baseline vectors between the two LEOs.
- Dilution of precision values.
LEOGPS will also output plots and reports on the interpolated GPS satellite ephemeris and clock biases.
For full documentation, please refer to the LEOGPS Read-The-Docs.
Recommended Python Version > 3.6
Core libraries necessary: NumPy (v1.14 and above), matplotlib, hatanaka
Standard Python libaries: os, copy, math, datetime, decimal, shutil, subprocess, warnings, urllib.request
Libraries for GUI: PIL, tkinter
Tested on Python version 3.6.5 (Anaconda with default packages).
If you have any queries feel free to reach out to me at:
Last Modified on 20-Sep-2021





























































