Comments (1)
 michael1309
commented on September 25, 2024
michael1309
commented on September 25, 2024
Hello @Bmoradi93
We were able to reproduce the behavior you described. You probably get something like this output when starting the driver.
[sick_generic_caller-1] [INFO] [1616064205.660359122] [sick_scan2]: MIN_ANG: -1.000 [rad] -57.296 [deg]
[sick_generic_caller-1] [INFO] [1616064205.660416963] [sick_scan2]: MAX_ANG: 1.000 [rad] 57.296 [deg]
[sick_generic_caller-1] [INFO] [1616064205.660602918] [sick_scan2]: Sending : sWN LMPoutputRange \x00\x01\x00\x00\x0d\x05\xff\xf7\x41\xe3\x00\x08\xbe\x1e
[sick_generic_caller-1] [INFO] [1616064205.670928968] [sick_scan2]: Receiving: <STX>sFA\x00\x04<ETX>
[sick_generic_caller-1] [INFO] [1616064205.671168257] [sick_scan2]: Error Sopas answer mismatch Error unexpected Sopas Answer for request <STX><STX><STX><STX>!sWN LMPoutputRange ApAnswer= >>>sFA\x00\x04<<<
[sick_generic_caller-1]
The answer <STX>sFA\x00\x04<ETX> which the Lidar returns means "value range of the command exceeded".
This is because the start and stop angles must be specified in the Lidar coordinate system. This is rotated against the ROS coordinate system depending on the lidar type. As shown in this figure.
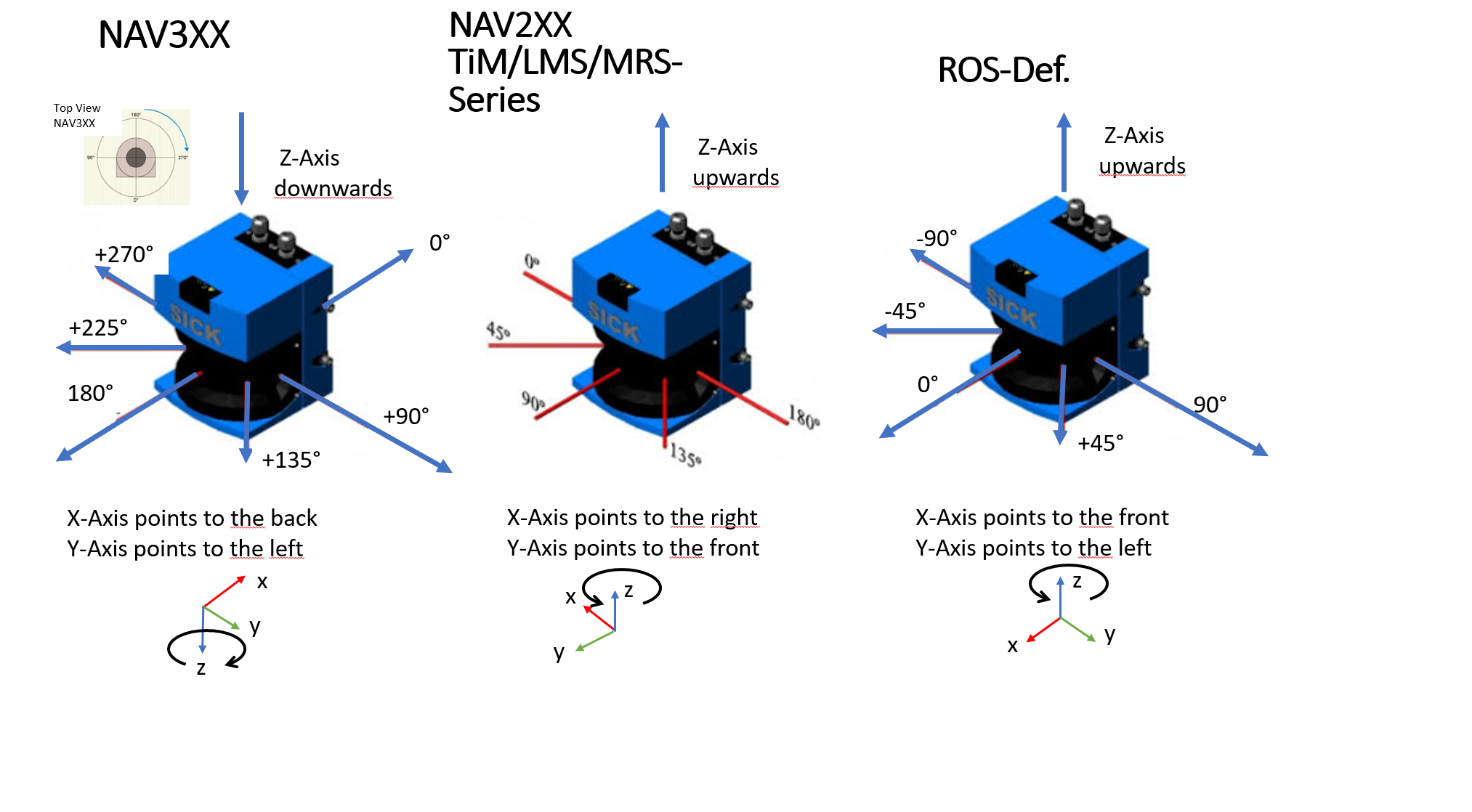
You should take this into account when setting the angles.
For example if you have an TIM 571 and want -90 to 90 ° in ros coordinate system yo need to enter
min_ang = 0.0
max_ang = 3.141
I hope this information helps you to solve the problem.
best regards
from sick_scan2.
Related Issues (20)
- Is it possible to set all parameters via ros, which can be set in sopas? HOT 1
- adjustments user manual HOT 2
- Support USB-Connection HOT 5
- Add an option to filter scan by intensity for ROS2 HOT 3
- sick_scan2 packages building HOT 2
- sick_scan2 packages HOT 1
- Scanner Connection Error Code: 1 HOT 7
- Sick_scan on W10 HOT 2
- TIM551 USB HOT 1
- Software gets stuck if run before the scanner is ready HOT 6
- MRS6000 Support HOT 2
- Scanner Connection HOT 3
- Setting IP Address of node at launch HOT 1
- No data received even after successful scanner initialization HOT 2
- Warning printout when running lidar HOT 2
- Which ROS 2 driver package to use and develop HOT 4
- Why the TiM571 RSSI value is different between ROS1 and ROS2? HOT 1
- ROS node dying on startup HOT 1
- C++17 compatibility HOT 1
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from sick_scan2.