Comments (4)
 manumerous
commented on June 6, 2024
1
manumerous
commented on June 6, 2024
1
Okay thanks for the quick answer. That sounds quite interesting and makes a lot of sense. In my log (generated with the default multi-rotor) all 6 instances give the same output though.
For the moment I think i will stick to the EKF data, since the two are fairly similar and the EKF seems to update at a higher frequency:
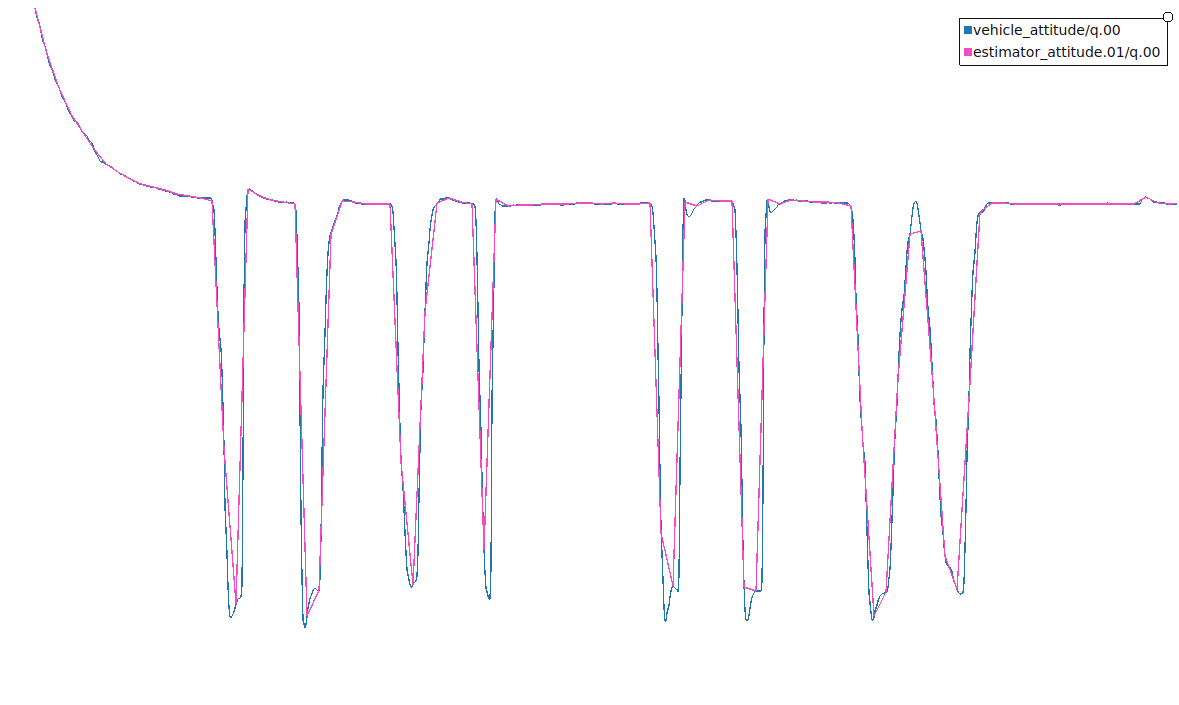
Maybe the vehicle attitude is just a slower sampling of the EKF attitude, which could make sense for some applications. But it is a good point to keep in mind I think. Therefore, I leave the Issue open. :)
from data-driven-dynamics.
 Jaeyoung-Lim
commented on June 6, 2024
Jaeyoung-Lim
commented on June 6, 2024
There are several quaternions in the estimator ( estimator_attitude.00, estimator_attitude.01, ..). Why are there 6 different attitude estimates?
Are those estimates the same? They seem to be from the log coming out of the simulation.
This is a "feature" called multi-EKF 😄 currently for SITL, all EKF instances (total of three) are all on the same IMU data, therefore the attitude estimate is the same. On real vehicles, different EKF instances run on different IMUs. Therefore, if one of them fail it falls back to the next EKF estimate. : PX4/PX4-Autopilot#14650
What is the difference between the estimator attitudes and the vehicle_attitude? The latter seems to be slightly different than the estimator attitudes.
This I am not sure, you might want to look into the code for that. It might be a internal attitude state vector that is being used around the system compared to the estimator_attitude topic is used to log what the estimator is doing.
from data-driven-dynamics.
Jaeyoung-Lim
commented on June 6, 2024
@manumerous Looking at your plot, isnt the estimator attitude the slower one? It looks like a subsample of vehicle attitude
from data-driven-dynamics.
manumerous
commented on June 6, 2024
Yes sure, sorry I confused that. Thanks for pointing out.
from data-driven-dynamics.
Related Issues (20)
- RotorModel fails to calculate relevant features if position and axis vector are collinear HOT 5
- Evaluation with identified model HOT 10
- [FeatureRequest] Non-dynamic parameter estimation HOT 2
- Compute features before dataselection HOT 4
- Failure on using quadrotor model with plot enabled
- Pipeline fails with data selection HOT 1
- Online Sys ID HOT 6
- Pipeline fails with default models HOT 2
- Plotting broken(again)
- Moment prediction doesn't seem to be correct with QP HOT 2
- Multi instance topic logs break the pipeline
- Simulation and testing problem (inconsistent behavior) HOT 27
- Unified formatter for python code HOT 3
- Model estimation broken for upstream PX4 HOT 6
- ID data gathering FW/VTOL HOT 3
- self.prepare_regression_matrices() issue. HOT 3
- Are real flight logs available HOT 5
- make install-depdencies fail HOT 1
- Build failure
- Product of inertia problem
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from data-driven-dynamics.