sysu-star / racer Goto Github PK
View Code? Open in Web Editor NEWRapid Exploration with Multiple Unmanned Aerial Vehicles (UAV)
Rapid Exploration with Multiple Unmanned Aerial Vehicles (UAV)








































































































CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "active_perception"
with any of the following names:
active_perceptionConfig.cmake
active_perception-config.cmake
Add the installation prefix of "active_perception" to CMAKE_PREFIX_PATH or
set "active_perception_DIR" to a directory containing one of the above
files. If "active_perception" provides a separate development package or
SDK, be sure it has been installed.
Call Stack (most recent call first):
RACER/swarm_exploration/bspline_opt/CMakeLists.txt:18 (find_package)
Hello,
This work and your paper are very interesting. Do you have any plans to add a license to your code? A license would ensure that the great work done here could be used in an open source way, if that is your intention.
Some relevant documentation by GitHub on the topic:
Thanks for your consideration!
ubuntu18.04+ros melodic catkin_make partial error message:
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minusscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minusscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minusscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minusscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minusscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp: In function ‘const pcl::PPFSignature& pcl::common::operator/=(pcl::PPFSignature&, const float&)’:
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp: In function ‘const pcl::PPFSignature pcl::common::operator/(const float&, const pcl::PPFSignature&)’:
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar2’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar2’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar2’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar2’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘divscalar2’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minus’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^/usr/local/include/pcl-1.12/pcl/impl/point_types.hpp:2145:1: error: ‘minus’ is not a member of ‘pcl::traits’
POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFSignature,
^
I just follow the step of the quick start, why this error happen
Hi ,
I go ahead with the recommendation of "-std=c++14" change in the cmakes, and installed dw. All is compiling other than lkh_tsp_solver and lkh_mtsp_solver. I am getting the following error.
usr/bin/ld: CMakeFiles/lkh_tsp_solver.dir/src/SolveCompressedSubproblem.c.o:(.bss+0xa0): multiple definition of PatchingCExtended; CMakeFiles/lkh_tsp_solver.dir/src/Activate.c.o:(.bss+0xa0): first defined here /usr/bin/ld: CMakeFiles/lkh_tsp_solver.dir/src/SolveCompressedSubproblem.c.o:(.bss+0xa4): multiple definition of PatchingARestricted; CMakeFiles/lkh_tsp_solver.dir/src/Activate.c.o:(.bss+0xa4): first defined here /usr/bin/ld: CMakeFiles/lkh_tsp_solver.dir/src/SolveCompressedSubproblem.c.o:(.bss+0xa8): multiple definition of PatchingAExtended; CMakeFiles/lkh_tsp_solver.dir/src/Activate.c.o:(.bss+0xa8): first defined here /usr/bin/ld: CMakeFiles/lkh_tsp_solver.dir/src/SolveCompressedSubproblem.c.o:(.bss+0xac): multiple definition of MoorePartitioning; CMakeFiles/lkh_tsp_solver.dir/src/Activate.c.o:(.bss+0xac): first defined here /usr/bin/ld: CMakeFiles/lkh_tsp_solver.dir/src/SolveCompressedSubproblem.c.o:(.bss+0xb0): multiple definition of KMeansPartitioning; CMakeFiles/lkh_tsp_solver.dir/src/Activate.c.o:(.bss+0xb0): first defined here
I tried to compile the LKH-3.0.6 and I get the same error. Also checked LKH-3.0.5, which also does not compile on Ubuntu20.04, LKH-3.0.7 and LKH-3.0.8 compiles but there are some changes on the APIs, so not sure how to add that part.
I did take a look at FUEL repo, but did not see much information other than the ones Known Issues part. Any recommendations?
Thank you for your great work. Recently, I would like to deploy your algorithm on a real drone. Starting from exploring a single drone, let's take a look at the difficulty of real deployment, in order to guide my future research. How can I modify the launch file using Vins_ Fusion. Thank you
Thanks for your great attention!
I have already known the topic '/swarm_expl/pair_opt_send'.But I can't find where it goes after 'opt_pair' is published.Could you please tell me the place ,or if there are other special situations?
Thanks a lot!
Thanks for wonderful work!
I run RACER in ubuntu 18.04
I follow the guide,and run "source devel/setup.bash && roslaunch exploration_manager swarm_exploration.launch".
After click the "2D Nav Goal" in Gazebo, two of four uavs start to move. But after about 1 second, all UAVs got stuck as follows:
and I got the error log in terminal as follows (everything goes well when I run FUEL demo in my pc):
Stack trace (most recent call last):
#4 Object "", at 0xffffffffffffffff, in
#3 Object "/home/young8/multi_exploration/Racer_ws/devel/lib/libpath_searching.so", at 0x7f80dd0b400a, in fast_planner::KinodynamicAstar::cubic(double, double, double, double) [clone .cold.1153]
#2 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7f80db41fd06, in _Unwind_Resume
#1 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7f80db41f3e5, in
#0 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7f80db41ef34, in
Segmentation fault (Signal sent by the kernel [(nil)])
[ WARN] [1677247602.391850051]: Pair opt 1 & 3
[ERROR] [1677247602.414712002]: Larger cost after reallocation
[ WARN] [1677247602.414811365]: Drone 1 send opt request to 3, pair opt t: 0.022999, allocate t: 0.020624
[ WARN] [1677247602.417611228]: get response 1
[ WARN] [1677247602.491863740]: Pair opt 1 & 4
[ WARN] [1677247602.507779446]: Replan: cluster covered=====================================
[ WARN] [1677247602.515244865]: Drone 1 send opt request to 4, pair opt t: 0.023395, allocate t: 0.020891
[ WARN] [1677247602.516000740]: Replan: cluster covered=====================================
[ WARN] [1677247602.533452422]: get response 1
[ WARN] [1677247602.537027062]: Replan: cluster covered=====================================
Stack trace (most recent call last):
#4 Object "", at 0xffffffffffffffff, in
#3 Object "/home/young8/multi_exploration/Racer_ws/devel/lib/libpath_searching.so", at 0x7fbdc825000a, in fast_planner::KinodynamicAstar::cubic(double, double, double, double) [clone .cold.1153]
#2 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7fbdc65bbd06, in _Unwind_Resume
#1 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7fbdc65bb3e5, in
#0 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7fbdc65baf34, in
Segmentation fault (Signal sent by the kernel [(nil)])
[exploration_node_2-9] process has died [pid 18736, exit code -11, cmd /home/young8/multi_exploration/Racer_ws/devel/lib/exploration_manager/exploration_node /odom_world:=/state_ukf/odom_2 /map_ros/pose:=/pcl_render_node/sensor_pose_2 /map_ros/depth:=/pcl_render_node/depth_2 /map_ros/cloud:=/pcl_render_node/cloud_2 /planning/replan:=/planning/replan_2 /planning/new:=/planning/new_2 /planning/bspline:=/planning/bspline_2 /swarm_expl/drone_state_send:=/swarm_expl/drone_state /swarm_expl/drone_state_recv:=/swarm_expl/drone_state /swarm_expl/pair_opt_send:=/swarm_expl/pair_opt /swarm_expl/pair_opt_recv:=/swarm_expl/pair_opt /swarm_expl/pair_opt_res_send:=/swarm_expl/pair_opt_res /swarm_expl/pair_opt_res_recv:=/swarm_expl/pair_opt_res /swarm_expl/grid_tour_send:=/swarm_expl/grid_tour /swarm_expl/hgrid_send:=/swarm_expl/hgrid /multi_map_manager/chunk_stamps_send:=/multi_map_manager/chunk_stamps /multi_map_manager/chunk_data_send:=/multi_map_manager/chunk_data /multi_map_manager/chunk_stamps_recv:=/multi_map_manager/chunk_stamps /multi_map_manager/chunk_data_recv:=/multi_map_manager/chunk_data /planning/swarm_traj_recv:=/planning/swarm_traj /planning/swarm_traj_send:=/planning/swarm_traj /planning_vis/trajectory:=/planning_vis/trajectory_2 /planning_vis/frontier:=/planning_vis/frontier_2 /planning_vis/viewpoints:=/planning_vis/viewpoints_2 /sdf_map/occupancy_all:=/sdf_map/occupancy_all_2 /sdf_map/occupancy_local:=/sdf_map/occupancy_local_2 /sdf_map/occupancy_local_inflate:=/sdf_map/occupancy_local_inflate_2 /sdf_map/unknown:=/sdf_map/unknown_2 /sdf_map/update_range:=/sdf_map/update_range_2 /sdf_map/basecoor:=/swarm_sim_tf/basecoor_2 __name:=exploration_node_2 __log:=/home/young8/.ros/log/5feaccee-b44c-11ed-a4bd-38002590fcd6/exploration_node_2-9.log].
log file: /home/young8/.ros/log/5feaccee-b44c-11ed-a4bd-38002590fcd6/exploration_node_2-9*.log
[exploration_node_1-2] process has died [pid 18701, exit code -11, cmd /home/young8/multi_exploration/Racer_ws/devel/lib/exploration_manager/exploration_node /odom_world:=/state_ukf/odom_1 /map_ros/pose:=/pcl_render_node/sensor_pose_1 /map_ros/depth:=/pcl_render_node/depth_1 /map_ros/cloud:=/pcl_render_node/cloud_1 /planning/replan:=/planning/replan_1 /planning/new:=/planning/new_1 /planning/bspline:=/planning/bspline_1 /swarm_expl/drone_state_send:=/swarm_expl/drone_state /swarm_expl/drone_state_recv:=/swarm_expl/drone_state /swarm_expl/pair_opt_send:=/swarm_expl/pair_opt /swarm_expl/pair_opt_recv:=/swarm_expl/pair_opt /swarm_expl/pair_opt_res_send:=/swarm_expl/pair_opt_res /swarm_expl/pair_opt_res_recv:=/swarm_expl/pair_opt_res /swarm_expl/grid_tour_send:=/swarm_expl/grid_tour /swarm_expl/hgrid_send:=/swarm_expl/hgrid /multi_map_manager/chunk_stamps_send:=/multi_map_manager/chunk_stamps /multi_map_manager/chunk_data_send:=/multi_map_manager/chunk_data /multi_map_manager/chunk_stamps_recv:=/multi_map_manager/chunk_stamps /multi_map_manager/chunk_data_recv:=/multi_map_manager/chunk_data /planning/swarm_traj_recv:=/planning/swarm_traj /planning/swarm_traj_send:=/planning/swarm_traj /planning_vis/trajectory:=/planning_vis/trajectory_1 /planning_vis/frontier:=/planning_vis/frontier_1 /planning_vis/viewpoints:=/planning_vis/viewpoints_1 /sdf_map/occupancy_all:=/sdf_map/occupancy_all_1 /sdf_map/occupancy_local:=/sdf_map/occupancy_local_1 /sdf_map/occupancy_local_inflate:=/sdf_map/occupancy_local_inflate_1 /sdf_map/unknown:=/sdf_map/unknown_1 /sdf_map/update_range:=/sdf_map/update_range_1 /sdf_map/basecoor:=/swarm_sim_tf/basecoor_1 __name:=exploration_node_1 __log:=/home/young8/.ros/log/5feaccee-b44c-11ed-a4bd-38002590fcd6/exploration_node_1-2.log].
log file: /home/young8/.ros/log/5feaccee-b44c-11ed-a4bd-38002590fcd6/exploration_node_1-2*.log
[ WARN] [1677247602.821016119]: Pair opt 3 & 4
[ WARN] [1677247602.834322157]: Drone 3 send opt request to 4, pair opt t: 0.013321, allocate t: 0.012186
[ WARN] [1677247602.834615143]: get response 1
[ WARN] [1677247602.893309530]: Drone 3, [1.000550,0.344042,0.343853,3.832224], [time, length, vel, energy]
[ WARN] [1677247602.898017805]: Drone 4, [0.999200,0.213831,0.214002,2.681881], [time, length, vel, energy]
[ WARN] [1677247602.898866902]: Drone 2, [0.769890,0.082941,0.107731,5.035449], [time, length, vel, energy]
[ WARN] [1677247602.927753537]: Replan: cluster covered=====================================
[ WARN] [1677247602.937479053]: Drone 1, [0.924734,0.093479,0.101088,2.852091], [time, length, vel, energy]
[ WARN] [1677247602.943360037]: Replan: cluster covered=====================================
[ WARN] [1677247603.347882201]: Replan: cluster covered=====================================
[ WARN] [1677247603.353065950]: Replan: cluster covered=====================================
Stack trace (most recent call last):
#4 Object "", at 0xffffffffffffffff, in
#3 Object "/home/young8/multi_exploration/Racer_ws/devel/lib/libpath_searching.so", at 0x7faf0a55800a, in fast_planner::KinodynamicAstar::cubic(double, double, double, double) [clone .cold.1153]
#2 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7faf088c3d06, in _Unwind_Resume
#1 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7faf088c33e5, in
#0 Object "/lib/x86_64-linux-gnu/libgcc_s.so.1", at 0x7faf088c2f34, in
Segmentation fault (Signal sent by the kernel [(nil)])
[exploration_node_3-16] process has died [pid 18799, exit code -11, cmd /home/young8/multi_exploration/Racer_ws/devel/lib/exploration_manager/exploration_node /odom_world:=/state_ukf/odom_3 /map_ros/pose:=/pcl_render_node/sensor_pose_3 /map_ros/depth:=/pcl_render_node/depth_3 /map_ros/cloud:=/pcl_render_node/cloud_3 /planning/replan:=/planning/replan_3 /planning/new:=/planning/new_3 /planning/bspline:=/planning/bspline_3 /swarm_expl/drone_state_send:=/swarm_expl/drone_state /swarm_expl/drone_state_recv:=/swarm_expl/drone_state /swarm_expl/pair_opt_send:=/swarm_expl/pair_opt /swarm_expl/pair_opt_recv:=/swarm_expl/pair_opt /swarm_expl/pair_opt_res_send:=/swarm_expl/pair_opt_res /swarm_expl/pair_opt_res_recv:=/swarm_expl/pair_opt_res /swarm_expl/grid_tour_send:=/swarm_expl/grid_tour /swarm_expl/hgrid_send:=/swarm_expl/hgrid /multi_map_manager/chunk_stamps_send:=/multi_map_manager/chunk_stamps /multi_map_manager/chunk_data_send:=/multi_map_manager/chunk_data /multi_map_manager/chunk_stamps_recv:=/multi_map_manager/chunk_stamps /multi_map_manager/chunk_data_recv:=/multi_map_manager/chunk_data /planning/swarm_traj_recv:=/planning/swarm_traj /planning/swarm_traj_send:=/planning/swarm_traj /planning_vis/trajectory:=/planning_vis/trajectory_3 /planning_vis/frontier:=/planning_vis/frontier_3 /planning_vis/viewpoints:=/planning_vis/viewpoints_3 /sdf_map/occupancy_all:=/sdf_map/occupancy_all_3 /sdf_map/occupancy_local:=/sdf_map/occupancy_local_3 /sdf_map/occupancy_local_inflate:=/sdf_map/occupancy_local_inflate_3 /sdf_map/unknown:=/sdf_map/unknown_3 /sdf_map/update_range:=/sdf_map/update_range_3 /sdf_map/basecoor:=/swarm_sim_tf/basecoor_3 __name:=exploration_node_3 __log:=/home/young8/.ros/log/5feaccee-b44c-11ed-a4bd-38002590fcd6/exploration_node_3-16.log].
log file: /home/young8/.ros/log/5feaccee-b44c-11ed-a4bd-38002590fcd6/exploration_node_3-16*.log
[ WARN] [1677247603.773967676]: Replan: cluster covered=====================================
[ WARN] [1677247603.898132827]: Drone 4, [1.999318,0.988353,0.494345,5.149499], [time, length, vel, energy]
[ WARN] [1677247603.898965140]: Drone 2, [0.769890,0.082941,0.107731,5.035449], [time, length, vel, energy]
[ WARN] [1677247603.901671420]: Drone 3, [1.790637,1.070052,0.597582,17.157516], [time, length, vel, energy]
[ WARN] [1677247603.937533827]: Drone 1, [0.924734,0.093479,0.101088,2.852091], [time, length, vel, energy]
[ WARN] [1677247604.186434847]: Replan: cluster covered=====================================
[ WARN] [1677247604.648216646]: Replan: cluster covered=====================================
[ WARN] [1677247604.908088316]: Drone 4, [3.009233,1.775520,0.590024,12.785846], [time, length, vel, energy]
[ WARN] [1677247604.908892480]: Drone 2, [0.769890,0.082941,0.107731,5.035449], [time, length, vel, energy]
[ WARN] [1677247604.911605524]: Drone 3, [1.790637,1.070052,0.597582,17.157516], [time, length, vel, energy]
[ WARN] [1677247604.939140315]: Drone 1, [0.924734,0.093479,0.101088,2.852091], [time, length, vel, energy]
[ WARN] [1677247605.059736308]: Replan: cluster covered=====================================
[ WARN] [1677247605.475253547]: Replan: cluster covered=====================================
Thanks for your great and cool work in autonomous exploration!
Recently, I am studying planning or exploration with a distributed drone swarm, but it is a realistic problem that how to ensure the time synchronization in the swarm. If the time is asynchronous, the collision might happen between drones.
Is there any good way to solve that problem?
Hi,
Im using realsense d435i and facing an issue of pointcloud in z axis. I am using depth topic of realsense.
I am giving my odometry topic whose forward is x, and also giving my odometry pose topic.

Please help
(1) I found the map doesn't get updated after one of the drone pass by (the one with Green Traj)

(2) why the system continuously give me message that hgrid out of range, does that mean anything wrong?

Im trying to install this using Docker. Got so many troubles using melodic version that I decided to try installing it using kinetic. I just replaced all the melodic ones with their kinetic alternative but when doing catkin_make it doesn't recognize the LKD despite being in /usr/local/bin . So, are the steps for installing in kinetic those? Or have you done anything different to make it work on that version?

Tanks for your code, I find the project cannot successfully compile on less than 8 core. On a 4-core CPU, the compilation of the srv files into .h files (such as SolveMTSP.h, ChunkStamps.h) could not be solved by recompiling. (Probably due to compiling order and parallel tasks). Anyone experiencing this problem can solve it by creating an empty header file or catkin_make it with other computer and use the .h file.

Following guide, but what else I have missed?
Please correct me, if I did something wrong, thanks.

When I start, the error "[ERROR] [1703141022.727323139]: Fail to solve ATSP" occurs. Currently, when I click on '2D Nav,' the program freezes. What could be the reason for this?
[ERROR] [1703141023.484201976]: Fail to solve ACVRP.
[ WARN] [1703141023.488464743]: Drone 1 send opt request to 2, pair opt t: 0.094435, allocate t: 0.089981
[ WARN] [1703141023.499463192]: [Traj server]: init...
[ WARN] [1703141023.529948049]: Pair opt 1 & 2
[ERROR] [1703141023.560839094]: Fail to solve ACVRP.
[ WARN] [1703141023.564007632]: Drone 1 send opt request to 2, pair opt t: 0.034106, allocate t: 0.030868
[ WARN] [1703141023.592531548]: Reject frequent attempt
[ WARN] [1703141023.592893510]: get response 2
[ WARN] [1703141023.629597664]: Global Pointcloud received..
global map has points: 187081.
[ WARN] [1703141023.677698339]: Pair opt 1 & 2
[ERROR] [1703141023.711393238]: Fail to solve ACVRP.
[ WARN] [1703141023.714765857]: Drone 1 send opt request to 2, pair opt t: 0.037116, allocate t: 0.033672
[ERROR] [1703141023.805901394]: Fail to solve ATSP.
[ WARN] [1703141023.819792237]: Pair opt 1 & 2
[ERROR] [1703141023.862610568]: Fail to solve ACVRP.
[ WARN] [1703141023.865683084]: Drone 1 send opt request to 2, pair opt t: 0.045955, allocate t: 0.042739
[ WARN] [1703141023.899997182]: wait for trigger.
[ WARN] [1703141023.902972485]: get response 1
0
0
[ WARN] [1703141024.099688638]: [Traj server]: ready.
[ WARN] [1703141024.191062850]: Empty dominance.
[ WARN] [1703141024.439777066]: wait for init
0
0
[ WARN] [1703141024.536757417]: [Traj server]: ready.
[ WARN] [1703141024.684873392]: Empty dominance.
[ WARN] [1703141024.909039558]: wait for trigger.
[ WARN] [1703141025.183037478]: Empty dominance.
[ WARN] [1703141025.398208479]: wait for trigger.
[ WARN] [1703141025.674419496]: Empty dominance.
[ WARN] [1703141025.857706619]: Init grid allocation.
[ WARN] [1703141025.861715592]: Init grid allocation.
[ WARN] [1703141025.861757730]: Empty dominance.
[ WARN] [1703141025.915766053]: wait for trigger.
[ WARN] [1703141026.081909783]: no odom
[ WARN] [1703141026.158268163]: no odom
[ WARN] [1703141026.193196679]: Empty dominance.
[ WARN] [1703141026.229409616]: wait for init
[ WARN] [1703141026.317953940]: wait for init
[ WARN] [1703141026.333339218]: Empty dominance.
[ WARN] [1703141026.403677652]: wait for trigger.
[ WARN] [1703141026.684236865]: Empty dominance.
[ WARN] [1703141026.825911733]: Empty dominance.
[ WARN] [1703141026.921029902]: wait for trigger.
[ WARN] [1703141027.203808724]: Empty dominance.
[ WARN] [1703141027.239298498]: wait for init
[ WARN] [1703141027.325748537]: Empty dominance.
[ WARN] [1703141027.327176653]: wait for init
[ WARN] [1703141027.413519061]: wait for trigger.
[ WARN] [1703141027.674807969]: Empty dominance.
[ WARN] [1703141027.829111173]: Empty dominance.
[ WARN] [1703141027.928267231]: wait for trigger.
[ WARN] [1703141028.126720649]: wait for trigger.
[ WARN] [1703141028.187451920]: Empty dominance.
[ WARN] [1703141028.231026346]: wait for trigger.
[ WARN] [1703141028.325989125]: Empty dominance.
[ WARN] [1703141028.409000246]: Init grid allocation.
[ WARN] [1703141028.411636154]: Init grid allocation.
[ WARN] [1703141028.411656182]: Empty dominance.
[ WARN] [1703141028.416706202]: wait for trigger.
[ WARN] [1703141028.472782335]: Init grid allocation.
[ WARN] [1703141028.475829125]: Init grid allocation.
[ WARN] [1703141028.475882397]: Empty dominance.
[ WARN] [1703141028.686085860]: Empty dominance.
[ WARN] [1703141028.825098435]: Empty dominance.
[ WARN] [1703141028.888478771]: Empty dominance.
[ WARN] [1703141028.937284910]: wait for trigger.
[ WARN] [1703141028.951512767]: Empty dominance.
[ WARN] [1703141029.134726504]: wait for trigger.
[ WARN] [1703141029.189288654]: Empty dominance.
[ WARN] [1703141029.238066851]: wait for trigger.
[ WARN] [1703141029.332850438]: Empty dominance.
[ WARN] [1703141029.385878752]: Empty dominance.
[ WARN] [1703141029.420397231]: wait for trigger.
[ WARN] [1703141029.458643758]: Empty dominance.
[ WARN] [1703141029.680179138]: Empty dominance.
[ WARN] [1703141029.824070521]: Empty dominance.
[ WARN] [1703141029.885188187]: Empty dominance.
[ WARN] [1703141029.952325676]: Empty dominance.
[ WARN] [1703141029.975308203]: wait for trigger.
[ WARN] [1703141030.140714956]: wait for trigger.
[ WARN] [1703141030.199442595]: Empty dominance.
[ WARN] [1703141030.243453408]: wait for trigger.
[ WARN] [1703141030.323901395]: Empty dominance.
[ WARN] [1703141030.384894858]: Empty dominance.
[ WARN] [1703141030.430229508]: wait for trigger.
[ WARN] [1703141030.452624161]: Empty dominance.
[ WARN] [1703141030.685714306]: Empty dominance.
[ WARN] [1703141030.823470949]: Empty dominance.
[ WARN] [1703141030.886448617]: Empty dominance.
[ WARN] [1703141030.959205047]: Empty dominance.
[ WARN] [1703141030.982819483]: wait for trigger.
[ WARN] [1703141031.150594358]: wait for trigger.
[ WARN] [1703141031.185745471]: Empty dominance.
[ WARN] [1703141031.249030012]: wait for trigger.
[ WARN] [1703141031.324433671]: Empty dominance.
[ WARN] [1703141031.386851089]: Empty dominance.
[ WARN] [1703141031.436510662]: wait for trigger.
[ WARN] [1703141031.454661016]: Empty dominance.
[ WARN] [1703141031.684708333]: Empty dominance.
[ WARN] [1703141031.721103462]: Start expl pos: 0 0 1
[ WARN] [1703141031.721157409]: Start expl pos: 0 -1 1
[ WARN] [1703141031.726909996]: Empty dominance.
[ WARN] [1703141031.726960852]: No grid
[ WARN] [1703141031.729543259]: Empty dominance.
[ WARN] [1703141031.729597463]: No grid
[ WARN] [1703141031.732846606]: Start expl pos: 1 0 1
[ WARN] [1703141031.737761103]: Start expl pos: 1 -1 1
[ WARN] [1703141031.741353888]: Empty dominance.
[ WARN] [1703141031.741380359]: No grid
[ WARN] [1703141031.741540437]: Empty dominance.
[ WARN] [1703141031.741567089]: No grid
Great job! I am a beginner in this field. I want to know:
Can this work be used in such an environment as the tunnel? In other words, does this need GPS signal information?
How do I deploy the environment in the real world, and whether there are relevant papers and documents for reference?
Looking forward to your reply. Many thanks!
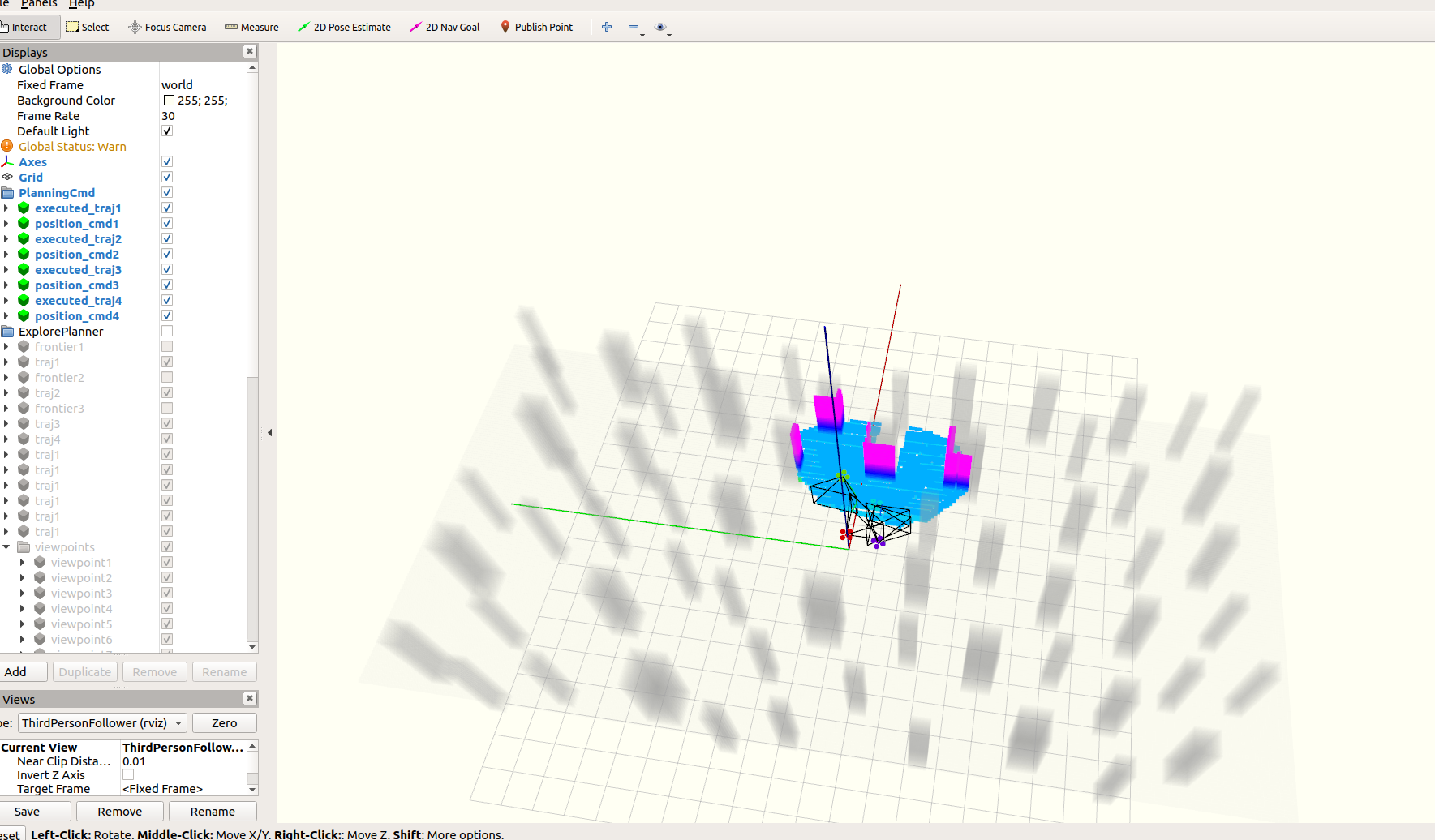
when I running this code: source devel/setup.bash && roslaunch exploration_manager swarm_exploration.launch. I have facing a problem that confuse me, why its occur this error:"[ERROR] [1711975484.051144093]: Larger cost after reallocation
[ERROR] [1711975484.051167210]: Path 1 inconsistent"... the first image (racer) is a screenshot of the open-source code published by the author of this method on GitHub; the second image (test racer) is the result that appeared after I configured the running environment based on the author's readme; the third image (test result) is the issue prompted at runtime. Why is the final result different from the author's? Is the result I obtained also correct? If not correct, which files should be modified? Thank you very much and I look forward to your reply. Thank you.



When I compile the source code with catkin_make, I get the error: in multi_map_manager.h:7:10: fatal error: plan_env/ChunkStamps.h: There are no such files or directories. I checked in the source code that I really didn't find this file under the plan_env folder.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.