wilselby / ros_quadrotor_simulator Goto Github PK
View Code? Open in Web Editor NEWQuadrotor simulator using ROS, Gazebo, and RVIZ
Quadrotor simulator using ROS, Gazebo, and RVIZ




















































































































Hello,
i am trying to install and run this package. I am using ROS Kinetic in Ubuntu 16.04. I am getting the following error: " fatal error: action_controller/MultiDofFollowJointTrajectoryAction.h: No such file or directory "
Please help.
Cheers,
svj
Hi Please help me. I'm new to ROS and Gazebo and I followed your model verification directions but I wasn't able to create the URDF description. This is what I got:
~/ros/catkin_ws/src/ROS_quadrotor_simulator/quad_description/urdf$ rosrun xacro xacro.py kit_c.xacro -o /tmp/kit_c.urdfTraceback (most recent call last):
File "/opt/ros/indigo/share/xacro/xacro.py", line 62, in
xacro.main()
File "/opt/ros/indigo/lib/python2.7/dist-packages/xacro/init.py", line 687, in main
process_includes(doc, os.path.dirname(args[0]))
File "/opt/ros/indigo/lib/python2.7/dist-packages/xacro/init.py", line 246, in process_includes
filename_spec = eval_text(elt.getAttribute('filename'), {})
File "/opt/ros/indigo/lib/python2.7/dist-packages/xacro/init.py", line 485, in eval_text
results.append(handle_extension(lex.next()[1][2:-1]))
File "/opt/ros/indigo/lib/python2.7/dist-packages/xacro/init.py", line 473, in handle_extension
return eval_extension("$(%s)" % s)
File "/opt/ros/indigo/lib/python2.7/dist-packages/xacro/init.py", line 66, in eval_extension
return substitution_args.resolve_args(str, context=substitution_args_context, resolve_anon=False)
File "/opt/ros/indigo/lib/python2.7/dist-packages/roslaunch/substitution_args.py", line 316, in resolve_args
resolved = _resolve_args(resolved, context, resolve_anon, commands)
File "/opt/ros/indigo/lib/python2.7/dist-packages/roslaunch/substitution_args.py", line 329, in _resolve_args
resolved = commands[command](resolved, a, args, context)
File "/opt/ros/indigo/lib/python2.7/dist-packages/roslaunch/substitution_args.py", line 157, in _find
pkg_path = rp.get_path(args[0])
File "/usr/lib/python2.7/dist-packages/rospkg/rospack.py", line 203, in get_path
raise ResourceNotFound(name, ros_paths=self._ros_paths)
rospkg.common.ResourceNotFound: quad_description
ROS path [0]=/opt/ros/indigo/share/ros
ROS path [1]=/home/magi/ros/catkin_ws/src
ROS path [2]=/opt/ros/indigo/share
ROS path [3]=/opt/ros/indigo/stacks
CMakeFiles/position_controller_node.dir/src/nodes/position_controller_node.cpp.o:
In function `double*& google::CheckNotNull<double*&>(char const*, int, char const*, double*&)':
position_controller_node.cpp:(.text._ZN6google12CheckNotNullIRPdEET_PKciS5_OS3_[_ZN6google12CheckNotNullIRPdEET_PKciS5_OS3_]+0x86):
undefined reference to `google::LogMessageFatal::LogMessageFatal(char const*, int, google::CheckOpString const&)'
position_controller_node.cpp:(.text._ZN6google12CheckNotNullIRPdEET_PKciS5_OS3_[_ZN6google12CheckNotNullIRPdEET_PKciS5_OS3_]+0x92):
undefined reference to `google::LogMessageFatal::~LogMessageFatal()'
collect2: error: ld returned 1 exit status
quadrotor/ROS_quadrotor_simulator/quad_control/CMakeFiles/position_controller_node.dir/build.make:112:
recipe for target Solution
Comment "CHECK_NOTNULL" in those files:(You can also use VSCode to find "CHECK_NOTNULL" in the folder)
ROS_quadrotor_simulator/quad_control/include/quad_control/common.h
ROS_quadrotor_simulator/quad_control/include/quad_control/parameters_ros.h
rotors_simulator/rotors_control/include/rotors_control/common.h
rotors_simulator/rotors_control/include/rotors_control/parameters_ros.h
You can find such code in "/usr/local/include/glog/logging.h" if you set up the glog by yourself.Those functions are called by "CHECK_NOTNULL" in logging.h.
class GOOGLE_GLOG_DLL_DECL LogMessageFatal : public LogMessage {
public:
LogMessageFatal(const char* file, int line);
LogMessageFatal(const char* file, int line, const CheckOpString& result);
__attribute__((noreturn)) ~LogMessageFatal();
};
template <typename T>
T* CheckNotNull(const char *file, int line, const char *names, T* t) {
if (t == NULL) {
LogMessageFatal(file, line, new std::string(names));
}
return t;
}
#define CHECK_NOTNULL(val) \
google::CheckNotNull(__FILE__, __LINE__, "'" #val "' Must be non NULL", (val))
Dear professor Wiselby:
I ran your code in my computer(ubuntu 14.04 indigo) but I face a new problem.The plan of moveit! is ok.The trail can appear in the rviz like this picture.
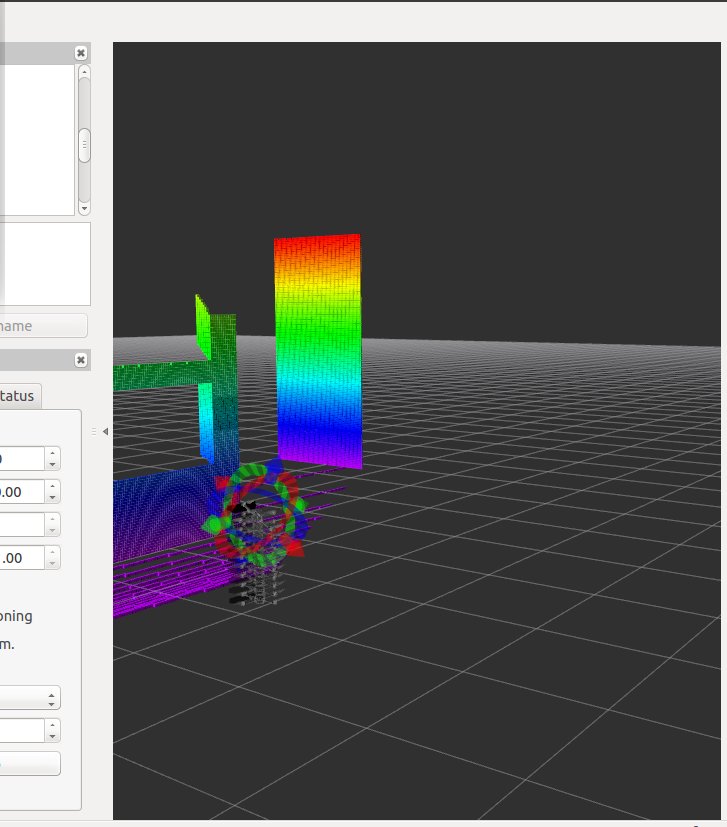
But after I clicked execute button,the rviz showed the planning is executed but nothing happened in gazebo like this picture,and the status of the robot did not update.
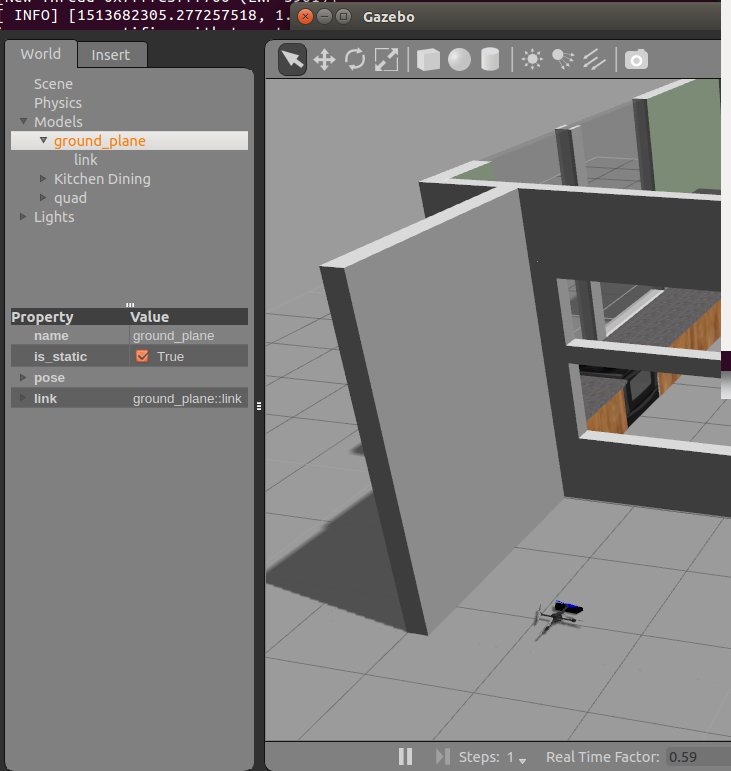
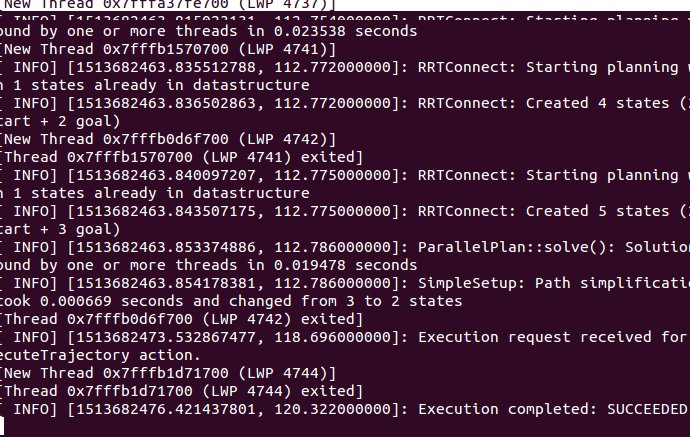
The terminal aslo showed the execution is successful.
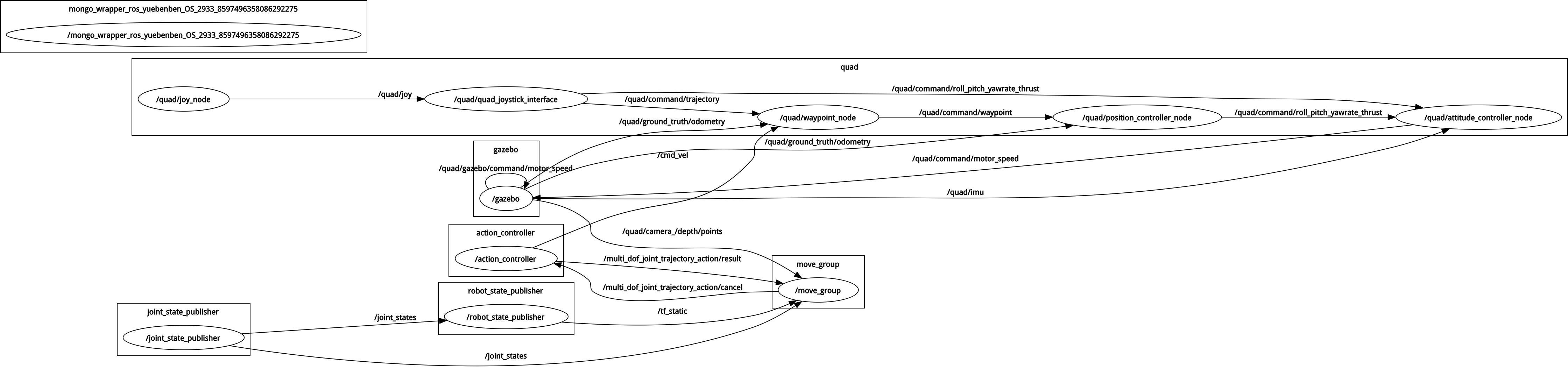
the rqt_graph is as this picture
this is another error "[ERROR] [1513682297.860795914]: Couldn't open joystick /dev/input/js0. Will retry every second." I don't have a joystick so I just ignore it.the "/multi_dof_joint_trajectory_action/goal" can be printed when I clicked execute and "/multi_dof_joint_trajectory_action/result" is
"header: ###
seq: 1
stamp:
secs: 354
nsecs: 285000000
frame_id: ''
status:
goal_id:
stamp:
secs: 352
nsecs: 661000000
id: /move_group-2-352.661000000
status: 3
text: ''
result:
error_code: 0
---"
However,I found the "/cmd_vel" which is published by action_controller is empty.on the contrary .The "/cmd3d_nav" have content as
" x: 0.0
y: 0.0
z: 0.0
acceleration:
x: 0.0
y: 0.0
z: 0.0
jerk:
x: 1.0
y: 0.0
z: 0.0
snap:
x: 0.0
y: 0.0
z: 0.0
yaw: 1.52000000044
yaw_rate: 0.0
---"
The "/cmd_3dnav"'s info is shown as follow
"Type: mav_msgs/CommandTrajectory
Publishers:
Subscribers:
Hi!
when I run roslaunch quav_3d quav_3d.launch and push the "execute" button,the info is
[ WARN] [1512270703.350232328, 261.711000000]: Maybe failed to update robot state, time diff: 2.158s
[ WARN] [1512270788.384673792, 334.554000000]: Failed to fetch current robot state.
the rqt_graph is shown as follow

and the robot is gazebo did not move anymore
the quav_3d.launch did contain the definition of “world” frame so I add this line “ ” which is copied from demo.launch.I choose world as fixed frame,everython seem to be ok except the "execute" as follow

could you please help me to solve this problem? thank you very much.
Hi,
I am trying to follow all the steps that you have mentioned, however when I enter (during the model Verification part)
rosrun xacro xacro.py kit_c.xacro -o /tmp/kit_c.urdf
I get an error:
Traceback (most recent call last):
File "/opt/ros/indigo/share/xacro/xacro.py", line 62, in
xacro.main()
File "/opt/ros/indigo/lib/python2.7/dist-packages/xacro/init.py", line 673, in main
f = open(args[0])
IOError: [Errno 2] No such file or directory: 'kit_c.xacro'
and the next command:
check_urdf kit_c.urdf
gives:
Error: Error document empty.
at line 72 in /build/buildd/urdfdom-0.2.10+dfsg/urdf_parser/src/model.cpp
ERROR: Model Parsing the xml failed
Can you please help me with? Do I need to install something extra? I am using Ubuntu 14.04 Trusty version and a newbie to ROS.
In wilowgarage map. provided 48 waypoints are not executing properly. Robot is actually following points but outside the maze. some problem with coordinate system. How to generate waypoints file from gazebo environment ?
cannot convert ‘const boost::shared_ptr<actionlib::SimpleActionClient<control_msgs::GripperCommandAction_<std::allocator > > >’ to ‘bool’ in return
return controller_action_client_;
^
/home/lisa/WORKSPACE/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h: In instantiation of ‘bool moveit_simple_controller_manager::ActionBasedControllerHandle::isConnected() const [with T = control_msgs::FollowJointTrajectoryAction_<std::allocator >]’:
/home/lisa/WORKSPACE/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:131:93: required from here
/home/lisa/WORKSPACE/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:95:12: error: cannot convert ‘const boost::shared_ptr<actionlib::SimpleActionClient<control_msgs::FollowJointTrajectoryAction_<std::allocator > > >’ to ‘bool’ in return
cannot convert ‘const boost::shared_ptr<actionlib::SimpleActionClient<control_msgs::GripperCommandAction_<std::allocator > > >’ to ‘bool’ in return
return controller_action_client_;
^
/home/lisa/WORKSPACE/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h: In instantiation of ‘bool moveit_simple_controller_manager::ActionBasedControllerHandle::isConnected() const [with T = control_msgs::FollowJointTrajectoryAction_<std::allocator >]’:
/home/lisa/WORKSPACE/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:131:93: required from here
/home/lisa/WORKSPACE/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:95:12: error: cannot convert ‘const boost::shared_ptr<actionlib::SimpleActionClient<control_msgs::FollowJointTrajectoryAction_<std::allocator > > >’ to ‘bool’ in return
cannot convert ‘const boost::shared_ptr<actionlib::SimpleActionClient<action_controller::MultiDofFollowJointTrajectoryAction_<std::allocator > > >’ to ‘bool’ in return
ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/build.make:62: recipe for target 'ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/src/moveit_simple_controller_manager.cpp.o' failed
make[2]: *** [ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/src/moveit_simple_controller_manager.cpp.o] Error 1
Do I need to install any glog dependency? I tryed to run sudo apt-get install libgoogle-glog-dev, but nothing happened.
[ 77%] Performing patch step for 'glog_src'
/bin/sh: 1: cannot open /home/andre/ros/catkin_ws/src/fix-unused-typedef-warning.patch: No such file
make[2]: *** [glog_catkin/glog_src-prefix/src/glog_src-stamp/glog_src-patch] Error 2
make[1]: *** [glog_catkin/CMakeFiles/glog_src.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
Linking CXX executable /home/andre/ros/catkin_ws/devel/lib/rotors_gazebo/gazebo_pose_publisher
[ 77%] Built target gazebo_pose_publisher
Linking CXX executable /home/andre/ros/catkin_ws/devel/lib/quad_joystick_interface/quad_joystick_interface
Linking CXX executable /home/andre/ros/catkin_ws/devel/lib/rotors_joy_interface/rotors_joy_interface
[ 77%] Built target quad_joystick_interface
[ 77%] Built target rotors_joy_interface
make[1]: *** [rotors_simulator/rotors_control/CMakeFiles/lee_position_controller.dir/all] Error 2
make[1]: *** [rotors_simulator/rotors_control/CMakeFiles/roll_pitch_yawrate_thrust_controller.dir/all] Error 2
The bug is not reproducible, so it is likely a hardware or OS problem.
make[2]: *** [ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/src/actionController.cpp.o] Error 1
make[1]: *** [ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/all] Error 2
The bug is not reproducible, so it is likely a hardware or OS problem.
make[2]: *** [ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/src/moveit_simple_controller_manager.cpp.o] Error 1
make[1]: *** [ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/all] Error 2
make: *** [all] Error 2
Invoking "make -j8 -l8" failed
EDIT:
I fixed that moving get-newest-config-guess.sh and fix-unused-typedef-warning.patch to the src folder. Still I can't run catkin_make without errors. Now I have erros on the build step:
[ 83%] Performing build step for 'glog_src'
make[3]: warning: -jN forced in submake: disabling jobserver mode.
make[1]: *** [ROS_quadrotor_simulator/quad_control/CMakeFiles/quad_controller.dir/all] Error 2
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-logging.lo -MD -MP -MF src/.deps/libglog_la-logging.Tpo -c src/logging.cc -fPIC -DPIC -o src/.libs/libglog_la-logging.o
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-demangle.lo -MD -MP -MF src/.deps/libglog_la-demangle.Tpo -c src/demangle.cc -fPIC -DPIC -o src/.libs/libglog_la-demangle.o
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-signalhandler.lo -MD -MP -MF src/.deps/libglog_la-signalhandler.Tpo -c src/signalhandler.cc -fPIC -DPIC -o src/.libs/libglog_la-signalhandler.o
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-raw_logging.lo -MD -MP -MF src/.deps/libglog_la-raw_logging.Tpo -c src/raw_logging.cc -fPIC -DPIC -o src/.libs/libglog_la-raw_logging.o
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-utilities.lo -MD -MP -MF src/.deps/libglog_la-utilities.Tpo -c src/utilities.cc -fPIC -DPIC -o src/.libs/libglog_la-utilities.o
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-symbolize.lo -MD -MP -MF src/.deps/libglog_la-symbolize.Tpo -c src/symbolize.cc -fPIC -DPIC -o src/.libs/libglog_la-symbolize.o
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-vlog_is_on.lo -MD -MP -MF src/.deps/libglog_la-vlog_is_on.Tpo -c src/vlog_is_on.cc -fPIC -DPIC -o src/.libs/libglog_la-vlog_is_on.o
src/logging_unittest.cc:64:17: error: ‘GFLAGS_NAMESPACE’ is not a namespace-name
using namespace GFLAGS_NAMESPACE;
^
src/logging_unittest.cc:64:33: error: expected namespace-name before ‘;’ token
using namespace GFLAGS_NAMESPACE;
^
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-raw_logging.lo -MD -MP -MF src/.deps/libglog_la-raw_logging.Tpo -c src/raw_logging.cc -fPIC -DPIC -o src/libglog_la-raw_logging.o >/dev/null 2>&1
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-utilities.lo -MD -MP -MF src/.deps/libglog_la-utilities.Tpo -c src/utilities.cc -fPIC -DPIC -o src/libglog_la-utilities.o >/dev/null 2>&1
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-vlog_is_on.lo -MD -MP -MF src/.deps/libglog_la-vlog_is_on.Tpo -c src/vlog_is_on.cc -fPIC -DPIC -o src/libglog_la-vlog_is_on.o >/dev/null 2>&1
make[3]: *** [src/logging_unittest-logging_unittest.o] Error 1
make[3]: *** Waiting for unfinished jobs....
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-symbolize.lo -MD -MP -MF src/.deps/libglog_la-symbolize.Tpo -c src/symbolize.cc -fPIC -DPIC -o src/libglog_la-symbolize.o >/dev/null 2>&1
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-signalhandler.lo -MD -MP -MF src/.deps/libglog_la-signalhandler.Tpo -c src/signalhandler.cc -fPIC -DPIC -o src/libglog_la-signalhandler.o >/dev/null 2>&1
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-demangle.lo -MD -MP -MF src/.deps/libglog_la-demangle.Tpo -c src/demangle.cc -fPIC -DPIC -o src/libglog_la-demangle.o >/dev/null 2>&1
Linking CXX executable /home/andre/catkin_ws/devel/lib/action_controller/action_controller
[ 83%] Built target action_controller
libtool: compile: g++ -DHAVE_CONFIG_H -I. -I./src -I./src -I/include -Wall -Wwrite-strings -Woverloaded-virtual -Wno-sign-compare -DNO_FRAME_POINTER -DNDEBUG -g -O2 -MT src/libglog_la-logging.lo -MD -MP -MF src/.deps/libglog_la-logging.Tpo -c src/logging.cc -fPIC -DPIC -o src/libglog_la-logging.o >/dev/null 2>&1
make[2]: *** [glog_catkin/glog_src-prefix/src/glog_src-stamp/glog_src-build] Error 2
make[1]: *** [glog_catkin/CMakeFiles/glog_src.dir/all] Error 2
Linking CXX shared library /home/andre/catkin_ws/devel/lib/libmoveit_simple_controller_manager.so
[ 83%] Built target moveit_simple_controller_manager
make: *** [all] Error 2
Invoking "make -j8 -l8" failed
apart from ROS_quadrotor_simullator which other packages are required ? do we need rotors_simulator (which branch) too and SITL ROS gazebo.
I compiled with 'wilselby/rotors_simulator'. It works but unable to control yaw of the quad.
Can we use it with arducopter SITL??
Hi,
I can't seem to generate an octomap in Rviz after running the quad_3dnav launch file This is my output in rviz. COuld you please kindly point me in the right direction.

Also, I get the following
[ERROR] [1486040499.742240912]: Group 'Quad_base' is not a chain
[ERROR] [1486040499.742304045]: Kinematics solver of type 'kdl_kinematics_plugin/KDLKinematicsPlugin' could not be initialized for group 'Quad_base'
[ERROR] [1486040499.742430888]: Kinematics solver could not be instantiated for joint group Quad_base.
However, I've set my Planning Groups to "None" and my "kinematics.yaml" file is empty.
when I trying to compile the 3d_nav package ,I got the error
fatal error: mav_msgs/CommandMotorSpeed.h: No such file or directory
#include <mav_msgs/CommandMotorSpeed.h>
And I checked the mav_msgs package, I just cannot find the commandMotorsSpeed.h file in that package.
I install the mav_msgs using the package https://github.com/ethz-asl/mav_comm
Apparently there is no such kind of .h file in that package,what should I do ?
Hi.
I try to make a catkin_make in the part of install-rotors-simulator and it fail
I install apart from the tutorial, moveIt and move_core
I think this is the error
/catkin_ws/src/ROS_quadrotor_simulator/action_controller/src/actionController.cpp:6:67: fatal error: action_controller/MultiDofFollowJointTrajectoryAction.h: No such file or directory #include <action_controller/MultiDofFollowJointTrajectoryAction.h>
the moveIt version is 0.7.12-0trusty-20170915-165807-0800 i think
thanks
When I try to launch,
roslaunch quad_3dnav quad_3dnav.launch
I receive the following error.
ERROR [/tmp/binarydeb/ros-indigo-roscpp-1.11.21/src/libros/publication.cpp:498(Publication::validateHeader) [topics: /rosout, /cmd_vel, /cmd_3dnav, /multi_dof_joint_trajectory_action/result, /multi_dof_joint_trajectory_action/feedback, /multi_dof_joint_trajectory_action/status] Client [/move_group] wants topic /multi_dof_joint_trajectory_action/feedback to have datatype/md5sum [action_controller/MultiDofFollowJointTrajectoryActionFeedback/bb90301ebf9ac17d9c3bcafa7a141cba], but our version has [action_controller/MultiDofFollowJointTrajectoryActionFeedback/0611ea4a62fe3c6e8470a86482016c70]. Dropping connection.
1.425000000 ERROR [/tmp/binarydeb/ros-indigo-roscpp-1.11.21/src/libros/publication.cpp:498(Publication::validateHeader) [topics: /rosout, /move_group/planning_scene_monitor/parameter_descriptions, /move_group/planning_scene_monitor/parameter_updates, /move_group/monitored_planning_scene, /move_group/ompl/parameter_descriptions, /move_group/ompl/parameter_updates, /move_group/display_planned_path, /move_group/display_contacts, /multi_dof_joint_trajectory_action/goal, /multi_dof_joint_trajectory_action/cancel] Client [/action_controller] wants topic /multi_dof_joint_trajectory_action/goal to have datatype/md5sum [action_controller/MultiDofFollowJointTrajectoryActionGoal/762be92da0a19418188f1bfa9dab9fe5], but our version has [action_controller/MultiDofFollowJointTrajectoryActionGoal/1292bbe002476592a0f3166376533ba1].
Hi,
after I git clone the rotors_simulator package, and I try to run catkin_make, I get the following error:
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:93 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:93 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:89 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:89 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:73 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:73 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:77 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:77 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:66 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:66 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:69 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:69 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:81 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:81 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:85 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error:
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
CMake Error at rotors_simulator/rotors_gazebo_plugins/CMakeLists.txt:85 (target_link_libraries):
Error evaluating generator expression:
$<TARGET_PROPERTY:UUID::UUID,INTERFACE_INCLUDE_DIRECTORIES>
Target "UUID::UUID" not found.
How to fix that?
Thanks alot for any help!
I am running Ubuntu 16.04 LTS, ROS Kinetic and Gazebo 8.6
When I place an obstacle in gazebo, Moveit is able to detect the object and voxels are seen on RVIZ. However when I remove the object or shift the object, the voxels at where the object previously was does not clear or disappear. How can I get Octomap to update the map without having the clear the map everytime?
Object placed at Position A:

Object moved to Position B but RVIZ still shows object at Position A:

Encountered with many errors while executing catkin build in my workspace.
At first had installed the rotor simulator package but was encountering with many problems so decided to delete the package as it was not much needed in the future.
Also did not have move_base package installed so make sure you install it while installing the noetic distro onto your device. if needed use this command: sudo apt-get install ros-noetic-navigation
Lastly debugged the CMakeLists.txt of action_controller in the ROS_quadrotor_simulator. In line 24 of CMakeLists.txt added the path to include folder in devel in the include_directories() or else it would not include the CommandTrajectory.h file
Hello,
I am working in a similar project here in Universidade Federal de Juiz de Fora, and I have to develop my own controllers but don't know exactly how to publish a command motor speed message. Initially I'm trying to use the rostopic pub command for later create a node to my controller:
rostopic pub /quad/command/motor_speed mav_msgs/CommandMotorSpeed "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
motor_speed:
Is there another way to set the motor speed? I have also to use the CommandRollPitchYawrateThrust message to move the quadrotor?
Hi,
I have installed this simulator. It's ok now, but i can't control using virtual joystick. (rotors_joy_interface/key_joystick.py)
After i view source code, i see that
topic > imu
is not published.
I think it because librotors_gazebo_imu_plugin.so not publish events, but don't know why it doesn't publish messages.
I have checked rostopic echo /quad/imu and it show nothing.
The bellow callback is not called.

I also checked librotors_gazebo_imu_plugin, it has published imu data on ~/quad/imu but callback is still not called.
I find that the gazebo_imu_plugin has published but with type gz_sensor_msgs::Imu, not sensor_msgs::Imu.
So, how to fix it.
On launching below command:
roslaunch quad_2dnav quad_2dnav.launch
there is a 90[deg] yaw difference between robot pose compared to Map on rviz. [attached below image]

How to correct it?
Also could you please list the procedure involve to from assigning goal and following it.
Hi Wilselby,
When launching the simulator in any gazebo world with waypoint publisher node, I noticed that the three parameters, time, x, y, and z are executed smoothly. However the yaw value does not get executed (in degrees). More or less the quadcopter keeps the same orientation when it is started. I was wondering if there is a bug related to this issue.
Thanks
Hi.
I'm trying to get things right with the quad2dnav package. All seems right, apart from that I can't liftoff the quadrotor. (I do not have a joystick, so I'm not using the joy node)
Since now I tried to publish
Any suggestion? What am I doing wrong?
Have you tested on ROS kinetic and gazebo 7?
Good afternoon, my friend and I are trying to use your simulator and it is in github, but we are having a problem, when we run some application like the kitchen, that ero appears, we would like to know if you can help us:
ERROR: cannot launch node of type [quad_joystick_interface/quad_joystick_interface]: can't locate node [quad_joystick_interface] in package [quad_joystick_interface]
ERROR: cannot launch node of type [quad_control/waypoint_publisher_node]: can't locate node [waypoint_publisher_node] in package [quad_control]
ERROR: cannot launch node of type [quad_control/position_controller_node]: can't locate node [position_controller_node] in package [quad_control]
ERROR: cannot launch node of type [quad_control/attitude_controller_node]: can't locate node [attitude_controller_node] in package [quad_control]
Hi!
I am trying to simulate the quadrotor using just the atttidue control. I successfully compiled the packages and lauched the following launch
roslaunch quad_gazebo quad_joystick_empty_world.launch
The Gazebo scene starts correctly but the quadrotor doesn't move. I have my Xbox360 joypad conrrectly configured and I can read messages on /quad/command/roll_pitch_yawrate_thrust topic, while this is the list of running nodes:
Do you have any suggestion to make the quadcopter moveing?
Thank you,
rosrun xacro xacro.py kit_c.xacro -o /tmp/kit_c.urdf
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
No such file or directory: kit_c.xacro None None
anyone help me with this
Did anyone was capable of running ROS_quadrotor_simulator on ROS melodic and Gazebo9?
I have been trying it for days but as I solve a problem another shows up. I have the desire to execute a system compoused of a drone capable of mapping an external environment, so I need a 3d mapping and collision avoidance system. This package looks to be the most appropriate for my desire but I am a litlle stucked. Does anyone have an idea how to make it run or a tip about another packages that could be applied for my system?
Thanks guys!
Hi,
I have successfully installed the package and everything seems to work fine. However, I am unable to get any response from the xbox 360 joystick to take off and land the quadroter. I have correctly configured the joystick and added the param /dev/input/js0 (for my case). When running the rosrun joy_node joy the joystick responds to the buttons, but not in the simulator. I am not sure how to fix this. I cant seem to find where the buttons are configured for the quadroter. Is it activated using a deadman switch? Please help. Thanks
Unable to update multi-DOF joint 'virtual_joint': TF has no common time between '/world' and 'base_link
Have you checked out your TF tree? It should have a connection “world” broadcast by Gazebo and connected to “base_link”. This is defined in the component_snippets.xacro file in the odometry_plugin_macro. Specifically, the parent_frame_id=”world” line. This should match the same line in the kit_c_base.xacro file as well.
Make sure that in quad_3dnav.launch you are spawning the quadrotor model with the file spawn_quad_kinect_kitchen.launch. In spawn_quad_kinect_kitchen.launch, make sure the enable_ground_truth parameter is set to “true”. The spawn_quad_kinect_kitchen launch file then loads the kit_c_base.xacro file which also loads the component_snippets.xacro file.
I have checked these and everything is as you mentioned in the comment, but I still get this warning all the time.
I am not able to figure out what is wrong with the process I followed as I am doing exactly the same as mentioned in your post. I am stuck at 64% make. Below is the error I am getting.
make[2]: *** [ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/src/actionController.cpp.o] Error 1
make[1]: *** [ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
make[2]: *** [ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/src/moveit_simple_controller_manager.cpp.o] Error 1
make[1]: *** [ROS_quadrotor_simulator/moveit_simple_controller_manager/CMakeFiles/moveit_simple_controller_manager.dir/all] Error 2
Linking CXX executable /home/akshaya/bhag_ws/devel/lib/rotors_joy_interface/rotors_joy_interface
[ 64%] Built target rotors_joy_interface
Linking CXX shared library /home/akshaya/bhag_ws/devel/lib/libroll_pitch_yawrate_thrust_controller.so
[ 64%] Built target roll_pitch_yawrate_thrust_controller
make: *** [all] Error 2
Invoking "make -j4 -l4" failed
Please let me know how to sort this out. Thank you/
In file included from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:41:0,
from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:39:
/opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:71:28: warning: explicit conversion operators only available with -std=c++11 or -std=gnu++11
explicit operator bool() const
^
In file included from /opt/ros/kinetic/include/moveit/macros/class_forward.h:40:0,
from /opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:43,
from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:41,
from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:39:
/opt/ros/kinetic/include/moveit/macros/declare_ptr.h:52:16: error: ‘shared_ptr’ in namespace ‘std’ does not name a template type
typedef std::shared_ptr Name##Ptr;
^
/opt/ros/kinetic/include/moveit/macros/class_forward.h:51:3: note: in expansion of macro ‘MOVEIT_DECLARE_PTR’
MOVEIT_DECLARE_PTR(C, C);
^
/opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:102:1: note: in expansion of macro ‘MOVEIT_CLASS_FORWARD’
MOVEIT_CLASS_FORWARD(MoveItControllerHandle);
^
/opt/ros/kinetic/include/moveit/macros/declare_ptr.h:53:16: error: ‘shared_ptr’ in namespace ‘std’ does not name a template type
typedef std::shared_ptr Name##ConstPtr;
^
/opt/ros/kinetic/include/moveit/macros/class_forward.h:51:3: note: in expansion of macro ‘MOVEIT_DECLARE_PTR’
MOVEIT_DECLARE_PTR(C, C);
^
/opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:102:1: note: in expansion of macro ‘MOVEIT_CLASS_FORWARD’
MOVEIT_CLASS_FORWARD(MoveItControllerHandle);
^
/opt/ros/kinetic/include/moveit/macros/declare_ptr.h:52:16: error: ‘shared_ptr’ in namespace ‘std’ does not name a template type
typedef std::shared_ptr Name##Ptr;
^
/opt/ros/kinetic/include/moveit/macros/class_forward.h:51:3: note: in expansion of macro ‘MOVEIT_DECLARE_PTR’
MOVEIT_DECLARE_PTR(C, C);
^
/opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:144:1: note: in expansion of macro ‘MOVEIT_CLASS_FORWARD’
MOVEIT_CLASS_FORWARD(MoveItControllerManager);
^
/opt/ros/kinetic/include/moveit/macros/declare_ptr.h:53:16: error: ‘shared_ptr’ in namespace ‘std’ does not name a template type
typedef std::shared_ptr Name##ConstPtr;
^
/opt/ros/kinetic/include/moveit/macros/class_forward.h:51:3: note: in expansion of macro ‘MOVEIT_DECLARE_PTR’
MOVEIT_DECLARE_PTR(C, C);
^
/opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:144:1: note: in expansion of macro ‘MOVEIT_CLASS_FORWARD’
MOVEIT_CLASS_FORWARD(MoveItControllerManager);
^
In file included from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:41:0,
from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:39:
/opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:185:11: error: ‘MoveItControllerHandlePtr’ does not name a type
virtual MoveItControllerHandlePtr getControllerHandle(const std::string& name) = 0;
^
In file included from /opt/ros/kinetic/include/moveit/macros/class_forward.h:40:0,
from /opt/ros/kinetic/include/moveit/controller_manager/controller_manager.h:43,
from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:41,
from /home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:39:
/opt/ros/kinetic/include/moveit/macros/declare_ptr.h:52:16: error: ‘shared_ptr’ in namespace ‘std’ does not name a template type
typedef std::shared_ptr Name##Ptr;
^
/opt/ros/kinetic/include/moveit/macros/class_forward.h:51:3: note: in expansion of macro ‘MOVEIT_DECLARE_PTR’
MOVEIT_DECLARE_PTR(C, C);
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:63:1: note: in expansion of macro ‘MOVEIT_CLASS_FORWARD’
MOVEIT_CLASS_FORWARD(ActionBasedControllerHandleBase);
^
/opt/ros/kinetic/include/moveit/macros/declare_ptr.h:53:16: error: ‘shared_ptr’ in namespace ‘std’ does not name a template type
typedef std::shared_ptr Name##ConstPtr;
^
/opt/ros/kinetic/include/moveit/macros/class_forward.h:51:3: note: in expansion of macro ‘MOVEIT_DECLARE_PTR’
MOVEIT_DECLARE_PTR(C, C);
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/action_based_controller_handle.h:63:1: note: in expansion of macro ‘MOVEIT_CLASS_FORWARD’
MOVEIT_CLASS_FORWARD(ActionBasedControllerHandleBase);
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:165:37: error: ‘MoveItControllerHandlePtr’ in namespace ‘moveit_controller_manager’ does not name a type
virtual moveit_controller_manager::MoveItControllerHandlePtr getControllerHandle(const std::string &name)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:234:24: error: ‘ActionBasedControllerHandleBasePtr’ was not declared in this scope
std::map<std::string, ActionBasedControllerHandleBasePtr> controllers_;
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:234:58: error: template argument 2 is invalid
std::map<std::string, ActionBasedControllerHandleBasePtr> controllers_;
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:234:58: error: template argument 4 is invalid
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp: In constructor ‘moveit_simple_controller_manager::MoveItSimpleControllerManager::MoveItSimpleControllerManager()’:
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:110:5: error: ‘ActionBasedControllerHandleBasePtr’ was not declared in this scope
ActionBasedControllerHandleBasePtr new_handle;
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:113:6: error: ‘new_handle’ was not declared in this scope
new_handle.reset(new GripperControllerHandle(name, action_ns));
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:125:19: error: no match for ‘operator[]’ (operand types are ‘int’ and ‘std::cxx11::string {aka std::cxx11::basic_string}’)
controllers[name] = new_handle;
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:130:6: error: ‘new_handle’ was not declared in this scope
new_handle.reset(new FollowJointTrajectoryControllerHandle(name, action_ns));
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:134:19: error: no match for ‘operator[]’ (operand types are ‘int’ and ‘std::cxx11::string {aka std::cxx11::basic_string}’)
controllers[name] = new_handle;
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:139:6: error: ‘new_handle’ was not declared in this scope
new_handle.reset(new MultiDofFollowJointTrajectoryControllerHandle(name, action_ns));
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:143:19: error: no match for ‘operator[]’ (operand types are ‘int’ and ‘std::cxx11::string {aka std::cxx11::basic_string}’)
controllers[name] = new_handle;
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:149:18: error: no match for ‘operator[]’ (operand types are ‘int’ and ‘std::cxx11::string {aka std::cxx11::basic_string}’)
controllers[name]->addJoint(std::string(controller_list[i]["joints"][j]));
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp: In member function ‘virtual void moveit_simple_controller_manager::MoveItSimpleControllerManager::getControllersList(std::vector<std::cxx11::basic_string >&)’:
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:30: error: ‘ActionBasedControllerHandleBasePtr’ was not declared in this scope
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.begin() ; it != controllers.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:64: error: template argument 2 is invalid
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.begin() ; it != controllers.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:64: error: template argument 4 is invalid
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:82: error: expected ‘;’ before ‘it’
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.begin() ; it != controllers.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:82: error: ‘it’ was not declared in this scope
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:100: error: request for member ‘begin’ in ‘((moveit_simple_controller_manager::MoveItSimpleControllerManager*)this)->moveit_simple_controller_manager::MoveItSimpleControllerManager::controllers’, which is of non-class type ‘int’
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.begin() ; it != controllers.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:129: error: request for member ‘end’ in ‘((moveit_simple_controller_manager::MoveItSimpleControllerManager*)this)->moveit_simple_controller_manager::MoveItSimpleControllerManager::controllers’, which is of non-class type ‘int’
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.begin() ; it != controllers.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:135: error: expected ‘)’ before ‘;’ token
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.begin() ; it != controllers.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:179:139: error: ‘it’ was not declared in this scope
for (std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers_.begin() ; it != controllers_.end() ; ++it)
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp: In member function ‘virtual void moveit_simple_controller_manager::MoveItSimpleControllerManager::getControllerJoints(const string&, std::vector<std::cxx11::basic_string >&)’:
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:205:25: error: ‘ActionBasedControllerHandleBasePtr’ was not declared in this scope
std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.find(name);
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:205:59: error: template argument 2 is invalid
std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers.find(name);
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:205:59: error: template argument 4 is invalid
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:205:77: error: expected initializer before ‘it’
std::map<std::string, ActionBasedControllerHandleBasePtr>::const_iterator it = controllers_.find(name);
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:206:7: error: ‘it’ was not declared in this scope
if (it != controllers_.end())
^
/home/nalin/Navigation/catkin_ws/src/ROS_quadrotor_simulator/moveit_simple_controller_manager/src/moveit_simple_controller_manager.cpp:206:26: error: request for member ‘end’ in ‘((moveit_simple_controller_manager::MoveItSimpleControllerManager*)this)->moveit_simple_controller_manager::MoveItSimpleControllerManager::controllers_’, which is of non-class type ‘int’
if (it != controllers_.end())
^
make[2]: *** [CMakeFiles/moveit_simple_controller_manager.dir/src/moveit_simple_controller_manager.cpp.o] Error 1
make[1]: *** [CMakeFiles/moveit_simple_controller_manager.dir/all] Error 2
make: *** [all] Error 2
Hi, while trying to run catkin_make under the Install rotors simulation section. I am getting the following error message.
[76%] Building CXX object ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/src/actionController.cpp.o
/home/jn//ros/catkin_ws/src/ROS_quadrotor_simulator/action_controller/src/actionController.cpp:6:67:
Fatal error: action_controller/MultiDofFollowJointTrajectoryAction.h: No such file or directory
#include <action_controller/MultiDofFollowJointTrajectoryAction.h>
compilation terminated.
make[2]: *** [ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/src/actionController.cpp.o] Error 1
make[1]: *** [ROS_quadrotor_simulator/action_controller/CMakeFiles/action_controller.dir/src/alll] Error 2
make: *** [all] Error 2
Invoking "make -j1 -l1" failed
I believe this is a similar issue to a previous one that was posted recently. If I could get a push in the right direction that would be greatly appreciated.
Thank you!
hi !
When I run roslaunch roslaunch quad_3dnav quad_3dnav.launch I get the output:
[ERROR] [1512140180.555562173, 0.340000000]: Client [/move_group] wants topic /multi_dof_joint_trajectory_action/feedback to have datatype/md5sum [action_controller/MultiDofFollowJointTrajectoryActionFeedback/bb90301ebf9ac17d9c3bcafa7a141cba], but our version has [action_controller/MultiDofFollowJointTrajectoryActionFeedback/0611ea4a62fe3c6e8470a86482016c70]. Dropping connection. [ERROR] [1512140180.655915619, 0.421000000]: Client [/action_controller] wants topic /multi_dof_joint_trajectory_action/goal to have datatype/md5sum [action_controller/MultiDofFollowJointTrajectoryActionGoal/762be92da0a19418188f1bfa9dab9fe5], but our version has [action_controller/MultiDofFollowJointTrajectoryActionGoal/1292bbe002476592a0f3166376533ba1]. Dropping connection.
My environment is kinetic,Iknow there are some mistake of actioncontroller and moveit but I don't know the reason .could you please telll me?
rosrun xacro xacro.py kit_c.xacro -o /tmp/kit_c.urdf
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
No such file or directory: kit_c.xacro None None
anyone help me with this
When I run
roslaunch quad_3dnav quad_3dnav.launch
I get the error:
[ERROR] [1480357098.245956879]: Group 'Quad_base' is not a chain
[ERROR] [1480357098.246008743]: Kinematics solver of type 'kdl_kinematics_plugin /KDLKinematicsPlugin' could not be initialized for group 'Quad_base'
[ERROR] [1480357098.246182732]: Kinematics solver could not be instantiated for joint group Quad_base.
And I can't interact with the quadrotor in rviz, there is no interact marker on the model. What's wrong here? Is there anything I can do ?
Thanks!
To control the quadrotor manually I have run
$ roslaunch quad_gazebo quad_joystick_empty_world.launch
this is the screen shot of the rqt_graph

when I use the Xbox controller, messages are getting published on /quad/command/motor_speed topic but the quadrotor isn't moving.
how does the /gazebo node get msgs from /quad/command/motor_speed which is published by /quad/attitude_controller_node?
Am I missing a plugin in gazebo to get the motor speeds?
Hi, I try to use your 3d naviguation simulation and mapping but I encoutered some problems : My waypoints seems to be broken when I start GPS Mode:
Start publishing #-800051560 waypoints
Publishing #0 x=0.000000 y=0.000000 z=0.000000 yaw=0.000000, and wait for 0.000000s.
Publishing #1 x=0.000000 y=0.000000 z=0.000000 yaw=0.000000, and wait for 0.000000s.
Publishing #2 x=0.000000 y=0.000000 z=0.000000 yaw=0.000000, and wait for 0.000000s.
Publishing #3 x=1.000000 y=0.000000 z=0.000000 yaw=0.000000, and wait for 0.000000s.
Publishing #4 x=0.000000 y=5738431076726222389685073172365035292083665080233866238859201001629927867862798979344841711774851300900159035643711474254561155928353114223259579820953653833115358476566324156825600.000000 z=0.000000 yaw=0.000000, and wait for 0.000000s.
Publishing #5 x=0.000000 y=0.000000 z=0.000000 yaw=0.000000, and wait for 34544653521011041425273226943955403952480793592875605810753909457570098983698963437919072949172041153383479371775238338564782493724937890751215317533162156809242810762819272704.000000s.
Hello,
I am working on project similar to your project. I have problem about yaw degree of the drone. If the target position yaw is smaller than 90 degree planned path is not work correctly. Drone rotate multiple times on any of the direction and goes to target point. I want to create planned path only changing drone position and yaw value. Is there any way to limit the planning algorithm like only rotate the yaw and don't change the pitch value ?
Additionally there is a yaw value difference between planned path and drone yaw value on rviz. Differences is exactly -90 degree. I try to decrease the target yaw value 90 degree but if the target yaw value is smaller than -90 planned path is changing and drone spin on x axis or y axis while planning the path.
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:100: undefined reference to google::FlagRegisterer::FlagRegisterer<int>(char const*, char const*, char const*, int*, int*)' collect2: error: ld returned 1 exit status Makefile:1109: recipe for target 'symbolize_unittest' failed make[3]: *** [symbolize_unittest] Error 1 make[3]: *** 正在等待未完成的任务.... Makefile:1073: recipe for target 'logging_striptest2' failed make[3]: *** [logging_striptest2] Error 1 src/demangle_unittest-demangle_unittest.o: In function __static_initialization_and_destruction_0':
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:93: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*)' /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:94: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits, std::allocator > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits, std::allocator >, std::__cxx11::basic_string<char, std::char_traits, std::allocator >)'
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:96: undefined reference to google::FlagRegisterer::FlagRegisterer<bool>(char const*, char const*, char const*, bool*, bool*)' /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:100: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, int*, int*)'
src/demangle_unittest-demangle_unittest.o: In function __static_initialization_and_destruction_0': /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/demangle_unittest.cc:49: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, bool*, bool*)'
collect2: error: ld returned 1 exit status
src/stl_logging_unittest-stl_logging_unittest.o: In function __static_initialization_and_destruction_0': /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:93: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits, std::allocator > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits, std::allocator >, std::__cxx11::basic_string<char, std::char_traits, std::allocator >)'
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:94: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*)' /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:96: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, bool*, bool*)'
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:100: undefined reference to google::FlagRegisterer::FlagRegisterer<int>(char const*, char const*, char const*, int*, int*)' collect2: error: ld returned 1 exit status Makefile:1055: recipe for target 'demangle_unittest' failed make[3]: *** [demangle_unittest] Error 1 Makefile:1103: recipe for target 'stl_logging_unittest' failed make[3]: *** [stl_logging_unittest] Error 1 ./.libs/libglog.so: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, int*, int*)'
./.libs/libglog.so: undefined reference to google::FlagRegisterer::FlagRegisterer<bool>(char const*, char const*, char const*, bool*, bool*)' ./.libs/libglog.so: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits, std::allocator > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits, std::allocator >, std::__cxx11::basic_string<char, std::char_traits, std::allocator >)'
collect2: error: ld returned 1 exit status
Makefile:1097: recipe for target 'stacktrace_unittest' failed
make[3]: *** [stacktrace_unittest] Error 1
src/utilities_unittest-utilities_unittest.o: In function __static_initialization_and_destruction_0': /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:93: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits, std::allocator > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits, std::allocator >, std::__cxx11::basic_string<char, std::char_traits, std::allocator >)'
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:94: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*)' /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:96: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, bool*, bool*)'
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:100: undefined reference to google::FlagRegisterer::FlagRegisterer<int>(char const*, char const*, char const*, int*, int*)' collect2: error: ld returned 1 exit status src/logging_striptest0-logging_striptest_main.o: In function __static_initialization_and_destruction_0':
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/logging_striptest_main.cc:42: undefined reference to google::FlagRegisterer::FlagRegisterer<bool>(char const*, char const*, char const*, bool*, bool*)' ./.libs/libglog.so: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, int*, int*)'
./.libs/libglog.so: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*)' collect2: error: ld returned 1 exit status Makefile:1115: recipe for target 'utilities_unittest' failed make[3]: *** [utilities_unittest] Error 1 Makefile:1061: recipe for target 'logging_striptest0' failed make[3]: *** [logging_striptest0] Error 1 src/logging_unittest-logging_unittest.o: In function __static_initialization_and_destruction_0':
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:93: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >*)' /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:94: undefined reference to google::FlagRegisterer::FlagRegisterer<std::__cxx11::basic_string<char, std::char_traits, std::allocator > >(char const*, char const*, char const*, std::__cxx11::basic_string<char, std::char_traits, std::allocator >, std::__cxx11::basic_string<char, std::char_traits, std::allocator >)'
/home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:96: undefined reference to google::FlagRegisterer::FlagRegisterer<bool>(char const*, char const*, char const*, bool*, bool*)' /home/jianhuaixie/ros/catkin_ws/build/glog_catkin/glog_src-prefix/src/glog_src/src/googletest.h:100: undefined reference to google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, int*, int*)'
collect2: error: ld returned 1 exit status
Makefile:1079: recipe for target 'logging_unittest' failed
make[3]: *** [logging_unittest] Error 1
glog_catkin/CMakeFiles/glog_src.dir/build.make:113: recipe for target 'glog_catkin/glog_src-prefix/src/glog_src-stamp/glog_src-build' failed
make[2]: *** [glog_catkin/glog_src-prefix/src/glog_src-stamp/glog_src-build] Error 2
CMakeFiles/Makefile2:450: recipe for target 'glog_catkin/CMakeFiles/glog_src.dir/all' failed
make[1]: *** [glog_catkin/CMakeFiles/glog_src.dir/all] Error 2
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
Can you provide some reference to the kinematic and dynamics equations of the quadrotor considered while motion planning and how they have been integrated while using moveIt? How do the motion planner that we find in motion planning plugin respond to the planning request as for a quadrotor?
Is the state of quadrotor represented with links analogous to state, (x,y,z,γ,β,α)
or
X = (t,x,y,z,V,β,α)
or
some other state space
model://grass_plane and model://vrc_heightmap_1 models do not exist
How to resolve this issue ?
fatal error: mav_msgs/CommandTrajectory.h
This error is coming while building, catkin WorkSpace I have followed everything as per steps.
ROS_quadrotor_simulator/moveit_simple_controller_manager/include/moveit_simple_controller_manager/multi_dof_follow_joint_trajectory_handle.h:42:67: fatal error: action_controller/MultiDofFollowJointTrajectoryAction.h
I have compile problem as following
Would you please let me know how to fix it?
(I cannot find planning_msgs ROS package from website)
CMake Error at /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "planning_msgs"
with any of the following names:
planning_msgsConfig.cmake
planning_msgs-config.cmake
Add the installation prefix of "planning_msgs" to CMAKE_PREFIX_PATH or set
"planning_msgs_DIR" to a directory containing one of the above files. If
"planning_msgs" provides a separate development package or SDK, be sure it
has been installed.
Call Stack (most recent call first):
ROS_quadrotor_simulator/quad_control/CMakeLists.txt:9 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/wkyoun/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/wkyoun/catkin_ws/build/CMakeFiles/CMakeError.log".
I need to log ground truth of quadrotor (x,y,yaw). on topic /ground_truth_to_tf/pose robot pose are okey but to calculate robot yaw we need to use orientation. in orientation x and y are
x: -6.87593260918e-20
y: 1.25863102164e-19
approximatly zero and thus the yaw(calculate throw atan2(2*(q0q3+q1q2)),1-2*(q2q2+q3q3)) will be 0 or pi.
what's the solution?
Hello,
I was not able to follow on the tutorial because of this initial error :
Project 'rotors_control' tried to find library 'glog'. The library is
neither a target nor built/installed properly. Did you compile project
'glog_catkin'? Did you find_package() it before the subdirectory containing
its code is included?
Call Stack (most recent call first):
/opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:75 (find_package)
rotors_simulator/rotors_control/CMakeLists.txt:6 (find_package)
-- Configuring incomplete, errors occurred!
Do you have a fix for this.
Thanks.
Naveed
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.