stereolabs / zed-ros2-wrapper Goto Github PK
View Code? Open in Web Editor NEWROS 2 wrapper for the ZED SDK
Home Page: https://www.stereolabs.com/docs/ros2/
License: Apache License 2.0
ROS 2 wrapper for the ZED SDK
Home Page: https://www.stereolabs.com/docs/ros2/
License: Apache License 2.0

























































































































Describe the bug
[Eloquent] When replaying zed node data from rosbag in rviz2 tf view, only odom, base_link, map frames are available, the following frames are not:
Device information:
To Reproduce
Steps to reproduce the behavior:
ros2 launch zed_wrapper zed2.launch.py
ros2 bag record -a -o zed_test_bag
Stop rosbag recording (with ctrl+c), zed_node, and rvzi2
Now try to replay data, start rviz2 first.
Start rosbag replay
ros2 bag play zed_test_bag
Expected behavior
Here I expect to see base_link, map, odom, and zed2_* frames but I cannot see zed2_* frames nor in the frame listing neither in the Tree.
Is there any guess what could be the problem?
However, If I run robot state publisher manually, while replaying the bag all other frames appears, too.
Step 7
ros2 run robot_state_publisher robot_state_publisher <ros_ws>/src/zed-ros2-wrapper/zed_wrapper/urdf/zed2.urdf
Additional context
Hi,
We experienced some difference when using ZED SDK 3.4.0 compared to version 3.3.0 regarding the depth image quality.
See attached attached images below.
The depth quality with SDK 3.3.0 seems to be better. We used zed-ros2-wrapper with same configuration on the same svo recording. The compute platform is a Jetson AGX Xavier.
RGB image

SDK 3.3.0

SDK 3.4.0

Can you tell us what could be the cause for this? We chose to revert to SDK 3.3.0.
Thanks!
Hi,
I see that this package supports Crystal at this stage.
I did make an attempt at building it on my Dashing system. I successfully got through most of the build steps, until:
colcon build --symlink-install --packages-select stereolabs_zed --cmake-args=-DCMAKE_BUILD_TYPE=Release
Where the following issue occurred:
Starting >>> stereolabs_zed
--- stderr: stereolabs_zed
CMake Error at CMakeLists.txt:155 (rclcpp_components_register_nodes):
Unknown CMake command "rclcpp_components_register_nodes".
---
Failed <<< stereolabs_zed [ Exited with code 1 ]
Is Dashing support planned?
Best Regards
Your requirement for Eloquent https://index.ros.org/doc/ros2/Installation/Eloquent/ is EOL
Getting errors like:
when executing: "colcon build --symlink-install --packages-select stereolabs_zed --cmake-args=-DCMAKE_BUILD_TYPE=Release"
How do I fix this?
Since the introduction of the zed-ros2-interfaces submodule, I cannot git clone the repository in a Dockerfile anymore. I suppose the issue has something to do with the SSH URL of the submodule. I also tried the zed-ros-wrapper, which also has a submodule but with an HTTPS URL, and that works.
My Dockerfile
ARG ZED_SDK_VERSION
ARG L4T_VERSION
ARG ROS_DISTRO
FROM stereolabs/zed:${ZED_SDK_VERSION}-runtime-l4t-${L4T_VERSION} AS zed
FROM dustynv/ros:${ROS_DISTRO}-ros-base-l4t-${L4T_VERSION} as ros2
ENV ROS_WS="/workspaces/${ROS_DISTRO}"
FROM ros2 AS build
RUN apt-get update && \
apt-get install -y --no-install-recommends \
build-essential \
libturbojpeg-dev \
libusb-1.0-0-dev \
libv4l-dev && \
rm -rf /var/lib/apt/lists/*
# Get ZED ROS 2 wrapper source and dependencies that rosdep cannot find.
ARG ZED_SDK_VERSION
WORKDIR "${ROS_WS}/src"
RUN apt-get update && \
apt-get install -y --no-install-recommends git && \
git clone -b "${ROS_DISTRO}-v${ZED_SDK_VERSION}" --recurse https://github.com/stereolabs/zed-ros2-wrapper.git && \
git clone -b "${ROS_DISTRO}" https://github.com/ros/diagnostics.git && \
git clone -b ros2 https://github.com/ros-perception/image_common.git && \
git clone -b ros2 https://github.com/ros/xacro.git
COPY --from=zed /usr/local/zed /usr/local/zed/
ENV LD_LIBRARY_PATH="${LD_LIBRARY_PATH}:/usr/local/zed/lib"
WORKDIR ${ROS_WS}
RUN apt-get update && \
. "${ROS_ROOT/foxy/foxy\/install}/setup.sh" && \
rosdep update --rosdistro "${ROS_DISTRO}" && \
rosdep install --default-yes --ignore-src --from-paths . --rosdistro "${ROS_DISTRO}" && \
colcon build --event-handlers console_direct+ --executor sequential --packages-up-to zed_ros2 --cmake-args \
" -DCMAKE_BUILD_TYPE=Release" \
" -DCMAKE_LIBRARY_PATH=/usr/local/cuda/lib64/stubs" \
" -DCUDA_CUDART_LIBRARY=/usr/local/cuda/lib64/stubs" \
" -DCMAKE_CXX_FLAGS='-Wl,--allow-shlib-undefined'" && \
rm -rf /var/lib/apt/lists/* "${ROS_WS}/build"
# This symbolic link is needed to use the streaming features on Jetson inside a container
RUN ln -sf /usr/lib/aarch64-linux-gnu/tegra/libv4l2.so.0 /usr/lib/aarch64-linux-gnu/libv4l2.so
FROM build AS runtime
WORKDIR /workspaces
COPY tools/docker/entrypoint.sh .
ENTRYPOINT [ "./entrypoint.sh" ]and the entrypoint.sh file
#!/bin/bash
# shellcheck disable=SC1090
source "${ROS_ROOT/foxy/foxy\/install}/setup.bash"
source "${ROS_WS}/install/setup.bash"
exec "$@"
Build with
docker build --build-arg ZED_SDK_VERSION=3.6 --build-arg L4T_VERSION=r32.6.1 --build-arg ROS_DISTRO=foxy --platform linux/arm64 --tags test .Docker builds the image without failures.
I get the following error
[...]
Cloning into 'zed-ros2-wrapper'...
#10 132.3 Note: checking out '7cbd090186a838a93b0077fc861b887ba55aefc3'.
#10 132.3
#10 132.3 You are in 'detached HEAD' state. You can look around, make experimental
#10 132.3 changes and commit them, and you can discard any commits you make in this
#10 132.3 state without impacting any branches by performing another checkout.
#10 132.3
#10 132.3 If you want to create a new branch to retain commits you create, you may
#10 132.3 do so (now or later) by using -b with the checkout command again. Example:
#10 132.3
#10 132.3 git checkout -b <new-branch-name>
#10 132.3
#10 134.4 Submodule 'zed-ros2-interfaces' ([email protected]:stereolabs/zed-ros2-interfaces.git) registered for path 'zed-ros2-interfaces'
#10 134.8 Cloning into '/workspaces/foxy/src/zed-ros2-wrapper/zed-ros2-interfaces'...
#10 134.8 fatal: unable to fork
#10 134.9 fatal: clone of '[email protected]:stereolabs/zed-ros2-interfaces.git' into submodule path '/workspaces/foxy/src/zed-ros2-wrapper/zed-ros2-interfaces' failed
#10 134.9 Failed to clone 'zed-ros2-interfaces'. Retry scheduled
#10 135.1 Cloning into '/workspaces/foxy/src/zed-ros2-wrapper/zed-ros2-interfaces'...
#10 135.1 fatal: unable to fork
#10 135.1 fatal: clone of '[email protected]:stereolabs/zed-ros2-interfaces.git' into submodule path '/workspaces/foxy/src/zed-ros2-wrapper/zed-ros2-interfaces' failed
#10 135.1 Failed to clone 'zed-ros2-interfaces' a second time, aborting
------
executor failed running [/bin/bash -c apt-get update && apt-get install -y --no-install-recommends git && git clone -b "${ROS_DISTRO}-v${ZED_SDK_VERSION}" --recurse https://github.com/stereolabs/zed-ros2-wrapper.git && git clone -b "${ROS_DISTRO}" https://github.com/ros/diagnostics.git && git clone -b ros2 https://github.com/ros-perception/image_common.git && git clone -b ros2 https://github.com/ros/xacro.git]: exit code: 1ZED2i
OS: Ubuntu 20.04The git clone command works for zed-ros-wrapper, though. This is the reason why I suspect the submodule's URL.
Hi all,
I'm trying to set up zed-ros2-wrapper on a Jetson running ROS foxy. I'm using the dustynv base container, and installing the ZED SDK, Python API, and wrapper on top.
I don't want to rely on the eloquent branch as all my other containers are running Foxy, and I don't want to risk strange issues down the line with communication between ROS versions.
My Dockerfile is shown below
ARG ROS_VERSION=foxy
ARG L4T_MINOR_VERSION=5.0
ARG FROM_IMAGE=dustynv/ros:$ROS_VERSION-ros-base-l4t-r32.${L4T_MINOR_VERSION}
ARG OVERLAY_WS=/opt/ros/overlay_ws
# Base container
FROM $FROM_IMAGE
# After using an arg in a `FROM` line, the arg is lost.
# This will allow it to be used again.
ARG ROS_VERSION
ARG L4T_MINOR_VERSION
ARG OVERLAY_WS
ARG ZED_SDK_MAJOR=3
ARG ZED_SDK_MINOR=5
ARG JETPACK_MAJOR=4
ARG JETPACK_MINOR=5
# Fix for core dump errors when ZED SDK is installed
ENV OPENBLAS_CORETYPE ARMV8
# Update and install dependencies
RUN apt-get update && apt-get install --no-install-recommends -y \
lsb-release \
less \
udev \
wget \
apt-transport-https \
python3-pip
# Fix for numpy installation later on
RUN pip3 install --upgrade pip
# Install ZED SDK
RUN echo "# R32 (release), REVISION: ${L4T_MINOR_VERSION}" > /etc/nv_tegra_release ; \
wget -q --no-check-certificate -O ZED_SDK_Linux_JP.run https://download.stereolabs.com/zedsdk/${ZED_SDK_MAJOR}.${ZED_SDK_MINOR}/jp${JETPACK_MAJOR}${JETPACK_MINOR}/jetsons && \
chmod +x ZED_SDK_Linux_JP.run ; ./ZED_SDK_Linux_JP.run silent skip_tools && \
rm -rf /usr/local/zed/resources/* \
rm -rf ZED_SDK_Linux_JP.run && \
rm -rf /var/lib/apt/lists/*
# Install ZED Python API
RUN apt-get update -y && apt-get install --no-install-recommends python3 python3-pip python3-dev gfortran gcc musl-dev python3-setuptools build-essential -y && \
wget download.stereolabs.com/zedsdk/pyzed -O /usr/local/zed/get_python_api.py && \
python3 /usr/local/zed/get_python_api.py && \
python3 -m pip install cython wheel && \
python3 -m pip install numpy pyopengl *.whl && \
rm *.whl ; rm -rf /var/lib/apt/lists/*
# Copy source
WORKDIR $OVERLAY_WS
COPY src src
# Build
RUN /bin/bash -c "source /opt/ros/${ROS_VERSION}/install/setup.bash && colcon build --cmake-args=-DCMAKE_BUILD_TYPE=Release"My src folder contains the release version of the wrapper, as well as the ros diagnostics package as I got errors that it was missing before (https://github.com/ros/diagnostics/tree/foxy).
I'm getting the following error when building:
Step 24/24 : RUN /bin/bash -c "source /opt/ros/${ROS_VERSION}/install/setup.bash && colcon build --cmake-args=-DCMAKE_BUILD_TYPE=Release"
---> Running in 4a555d185645
Starting >>> diagnostic_updater
Starting >>> zed_interfaces
Starting >>> diagnostic_aggregator
[Processing: diagnostic_aggregator, diagnostic_updater, zed_interfaces]
[Processing: diagnostic_aggregator, diagnostic_updater, zed_interfaces]
[Processing: diagnostic_aggregator, diagnostic_updater, zed_interfaces]
Finished <<< diagnostic_updater [1min 54s]
Starting >>> self_test
[Processing: diagnostic_aggregator, self_test, zed_interfaces]
Finished <<< diagnostic_aggregator [2min 44s]
[Processing: self_test, zed_interfaces]
[Processing: self_test, zed_interfaces]
Finished <<< zed_interfaces [3min 49s]
Starting >>> zed_components
Finished <<< self_test [2min 20s]
--- stderr: zed_components
CMake Error at cmake_install.cmake:61 (file):
file INSTALL cannot find
"/opt/ros/overlay_ws/src/zed-ros2-wrapper-foxy-v3.5/zed_components/DIRECTORY".
make: *** [install] Error 1
---
Failed <<< zed_components [2min 29s, exited with code 2]
[Processing: zed_components]
[Processing: zed_components]
[Processing: zed_components]
[Processing: zed_components]
Summary: 4 packages finished [6min 19s]
1 package failed: zed_components
1 package had stderr output: zed_components
2 packages not processed
The command '/bin/bash -c /bin/bash -c "source /opt/ros/${ROS_VERSION}/install/setup.bash && colcon build --cmake-args=-DCMAKE_BUILD_TYPE=Release"' returned a non-zero code: 2
I'm not very familiar with C++ and CMakeLists so not too sure what is going wrong. Any help is much appreciated!
Hi, i want to run zedm on jetson NX.
Only jetpack4.4 support jetson NX.
So, i need to install ZED SDK3.2.
When does zed-ros2-wrapper support for ZED SDK 3.2?
Building zed-ros2-wrapper(Foxy - SDK v3.5.x tar ball) with colcon generates and error that a file DIRECTORY is missing. Build process is run in a docker build senario. Building with the latest commit on master was succesful so the issue seems to be isolated to the 3.5 foxy release.
Build the github release for foxy v3.5 with colcon/ament_cmake
There is no file named DIRECTORY and i don't know why CMake looks for it really. The expected results is a successful build.
Build fails
ZED2
Tegra for linux, jetpack 4.6
Jetson AGX Xavior
Docker
zed-ros2-wrapper release 3.5 for foxyConsole error:
CMake Error at cmake_install.cmake:69 (file):
file INSTALL cannot find
"/opt/ros/foxy/src/zed-ros2-wrapper-foxy-v3.5/zed_components/DIRECTORY": No
such file or directory.
Failed <<< zed_components [2min 58s, exited with code 1]
We need to be able to disable the magnetometer for the zed 2i-camera. It would be nice if there were some way to do that when you configure the camera setup.
We're using the zed 2i camera in strong magnetic fields, it would be nice if we could turn of zed 2i's reliance to the magnetometer as it will most likely mess up the zed 2i estimates for positioning.
No response
Hello,
I am using ROS2 ELOQUENT and i am trying to build zed-ros2-wrapper and i get the below error.attached the image.
I have tried with both master branch and eloquent branch but i get the same error.
Please support!
OS: Ubuntu
OS 18.04
ZED SDK Version: 3.2
ROS Wrapper version: eloquent

Is there a dependency on CUDA 10.2 for this wrapper?
When trying to build with colcon for Ubuntu 20.04 with CUDA 11.1 we're hitting this error:
--- stderr: zed_components
CMake Error: The following variables are used in this project, but they are set to NOTFOUND.
Please set them or make sure they are set and tested correctly in the CMake files:
CUDA_nppicom_LIBRARY (ADVANCED)
linked by target "zed_camera_component" in directory /home/kanke/ros2_example_ws/src/zed-ros2-wrapper/zed_components
Failed <<< zed_components [1.72s, exited with code 1]
Summary: 5 packages finished [3.42s]
1 package failed: zed_components
1 package had stderr output: zed_components
2 packages not processed
In digging a little bit it seems that libnppicom.so is no longer part of CUDA, but also I don't see where the reference to this is coming from as it doesn't seem to be reference anywhere in this repo.
Any thoughts? Thanks!
Hello,I have a problem with my recent project. I hope to set the resolution when I start the zed_wrapper.
Can I use this format: ros2 launch zed_wrapper zed2.launch.py --ros-args -p resolution:=2 ? Hope for your help
cat log.txt
In file included from /home/user/your_ws/install/zed_components/include/zed_components/sl_tools.h:50,
from /home/user/your_ws/install/zed_components/include/zed_components/zed_camera_component.hpp:29,
from /home/user/your_ws/zed-ros2-wrapper/zed_wrapper/src/zed_wrapper.cpp:26:
/usr/local/zed/include/sl/Camera.hpp:784:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:937:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1114:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1278:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1282:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1286:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1526:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1530:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp:1534:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
};
^
/usr/local/zed/include/sl/Camera.hpp: In function ‘cudaError sl::__cudaSafeCall(cudaError, const char*, const char*, int)’:
/usr/local/zed/include/sl/Camera.hpp:2048:89: warning: unused parameter ‘file’ [-Wunused-parameter]
daError __cudaSafeCall(cudaError err, const char *func, const char *file, const int line) {
~~~~~~~~~~~~^~~~
/usr/local/zed/include/sl/Camera.hpp:2048:105: warning: unused parameter ‘line’ [-Wunused-parameter]
daSafeCall(cudaError err, const char *func, const char *file, const int line) {
~~~~~~~~~~^~~~
In file included from /home/user/your_ws/install/zed_components/include/zed_components/sl_tools.h:50,
from /home/user/your_ws/install/zed_components/include/zed_components/zed_camera_component.hpp:29,
from /home/user/your_ws/zed-ros2-wrapper/zed_wrapper/src/zed_wrapper.cpp:26:
/usr/local/zed/include/sl/Camera.hpp: At global scope:
/usr/local/zed/include/sl/Camera.hpp:5335:12: warning: type qualifiers ignored on function return type [-Wignored-qualifiers]
inline const void /*@cond SHOWHIDDEN*/SL_SDK_EXPORT/*@endcond*/ getZEDSDKBuildVersion(int &major, int& minor, int& patch) {
^~~~~
In file included from /home/user/your_ws/install/zed_components/include/zed_components/sl_tools.h:50,
from /home/user/your_ws/install/zed_components/include/zed_components/zed_camera_component.hpp:29,
from /home/user/your_ws/zed-ros2-wrapper/zed_wrapper/src/zed_wrapper.cpp:26:
/usr/local/zed/include/sl/Camera.hpp:5724:2: warning: extra ‘;’ [-Wpedantic]
};
^
...
built node
err
ZED2
foxy ros2
jetson aarch64
20.04 ubuntuNo response
Having trouble with this wrapper. I see in the common.yaml file the device is being set to 720p by default, but when I echo the topic I see:
header:
stamp:
sec: 1615931279
nanosec: 259278004
frame_id: zed2_left_camera_optical_frame
height: 360
width: 640
encoding: bgra8
640x360
So exactly half of 720p. Setting this to 1080p results in a resolution of 960x540. Again, exactly half. I'm digging into this more, but up front I don't see what the cause is. QOS settings? Something dynamic? Bug? User error?
Help appreciated.
I'm getting the following error when building zed_components
Steps from my docker file
`ENV LOGNAME root
ENV DEBIAN_FRONTEND noninteractive
RUN apt-get update -y && apt-get install --no-install-recommends lsb-release wget less udev sudo apt-transport-https -y &&
wget -q --no-check-certificate -O ZED_SDK_Linux_JP.run https://download.stereolabs.com/zedsdk/3.6/jp45/jetsons &&
chmod +x ZED_SDK_Linux_JP.run ; ./ZED_SDK_Linux_JP.run silent runtime_only &&
rm -rf /usr/local/zed/resources/*
rm -rf ZED_SDK_Linux_JP.run &&
rm -rf /var/lib/apt/lists/*
RUN cd ${ROS_ROOT} &&
mkdir ${ROS_ROOT}/src &&
wget https://github.com/stereolabs/zed-ros2-wrapper/archive/refs/tags/foxy-v3.5.zip -q --no-check-certificate -O zed-ros2.zip &&
unzip zed-ros2.zip &&
mv zed-ros2-wrapper-foxy-v3.5 ${ROS_ROOT}/src/zed_ros2
RUN cd ${ROS_ROOT} &&
. ${ROS_ROOT}/install/setup.bash &&
colcon build --merge-install --cmake-args=-DCMAKE_BUILD_TYPE=Release`
Expected the package to build without error
Failed <<< zed_components [1min 8s, exited with code 2]`
ZED2i
OS: ubuntu 18.04 w/ jetpack 4.5.1
HW: nvidia jetson agxNo response
Thanks for being the pioneer make ros2 example available on internet.
some issue I tested on cuda10.0 nvidia-410
here is the report
https://hackmd.io/s/rkRj5iG5N
wish someone get what I mean.
Subscribing to the sensor_msgs/msg/Image topic named /zed/zed_node/left/image_rect_color images fails and does not show images are being published.
Device information:
Steps to reproduce the behavior:
cd $HOME
mkdir -p ~/zed_ros2_ws/src && cd ~/zed_ros2_ws/src
git clone https://github.com/stereolabs/zed-ros2-wrapper.git --single-branch --branch dev_foxy --depth 1
git clone https://github.com/stereolabs/zed-ros2-examples.git --single-branch --branch dev_foxy --depth 1
cd ~/zed_ros2_ws/
source /opt/ros/foxy/setup.bash
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
# Launch zed_display_rviz2
ros2 launch zed_display_rviz2 display_zed.launch.pyObserved that RViz2 is indeed able to display published images from /zed/zed_node/left/image_rect_color. See screenshot attached. However, RGB Image /zed/zed_node/rgb/image_rect_color/ does not show any images.
source /opt/ros/foxy/setup.bash
cd ~/zed_ros2_ws/
source install/setup.bash
ros2 run zed_tutorial_video zed_tutorial_video --ros-args -r left_image:=/zed/zed_node/left/image_rect_color -r right_image:=/zed/zed_node/right/image_rect_colorzed_tutorial_video is unresponsive and does not show anything.
ros2 topic echo to check if images are being published.source /opt/ros/foxy/setup.bash
ros2 topic echo /zed/zed_node/left/image_rect_colorObserved that nothing is being echoed on this topic, even though we confirmed earlier that RVIz2 is able to display the images being published on the same topic. Refer to .gif animation below.
Expected to run the following commands and observe the sensor_ msgs/msg/Image raw information being published onto terminal while zed_display_rviz2 ROS2 package is running:
source /opt/ros/foxy/setup.bash
ros2 topic echo /zed/zed_node/left/image_rect_color


Attempting to write my own ROS2 node that subscribes to the images published on this topic to use for subsequent 2D image processing.
Not sure what I am doing wrong or missing here. Will appreciate any help. Thanks.
Hello,
Do you have a ROS 2 Jetson docker image or Dockerfile for testing this zed-ros2-wrapper?
Thanks,
Bo
Hi,
I'm unable to build the ros2 wrapper using the given colcon command in the installation guide. I'm getting the error:
zed_camera_component.cpp:295:3: error: ‘set_on_parameters_set_callback’ was not declared in this scope
I've done some research on the topic and it turns out that the function set_on_parameters_set_callback is deprecated in ros21 foxy: ros2/rclcpp#1129
I've tried replacing it with the new function called add_on_set_parameters_callback as described here, but it did not help.
/home/jorgen/Work/NTNU/ProsjektOppgave/Code/ros2_ws/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp: In member function ‘void stereolabs::ZedCamera::initParameters()’:
/home/jorgen/Work/NTNU/ProsjektOppgave/Code/ros2_ws/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp:295:3: error: ‘set_on_parameters_set_callback’ was not declared in this scope
295 | set_on_parameters_set_callback(std::bind(&ZedCamera::callback_paramChange, this, _1));
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In file included from /opt/ros/galactic/include/rclcpp/client.hpp:40,
from /opt/ros/galactic/include/rclcpp/callback_group.hpp:23,
from /opt/ros/galactic/include/rclcpp/any_executable.hpp:20,
from /opt/ros/galactic/include/rclcpp/memory_strategy.hpp:25,
from /opt/ros/galactic/include/rclcpp/memory_strategies.hpp:18,
from /opt/ros/galactic/include/rclcpp/executor_options.hpp:20,
from /opt/ros/galactic/include/rclcpp/executor.hpp:36,
from /opt/ros/galactic/include/rclcpp/executors/multi_threaded_executor.hpp:26,
from /opt/ros/galactic/include/rclcpp/executors.hpp:21,
from /opt/ros/galactic/include/rclcpp/rclcpp.hpp:156,
from /home/jorgen/Work/NTNU/ProsjektOppgave/Code/ros2_ws/src/zed-ros2-wrapper/zed_components/src/zed_camera/include/zed_camera_component.hpp:31,
from /home/jorgen/Work/NTNU/ProsjektOppgave/Code/ros2_ws/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp:34:
/home/jorgen/Work/NTNU/ProsjektOppgave/Code/ros2_ws/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp: In member function ‘void stereolabs::ZedCamera::getGeneralParams()’:
/home/jorgen/Work/NTNU/ProsjektOppgave/Code/ros2_ws/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp:371:31: warning: too many arguments for format [-Wformat-extra-args]
371 | RCLCPP_WARN(get_logger(), "'pub_frame_rate' cannot be bigger than 'grab_frame_rate'", paramName.c_str());
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
make[2]: *** [CMakeFiles/zed_camera_component.dir/build.make:76: CMakeFiles/zed_camera_component.dir/src/zed_camera/src/zed_camera_component.cpp.o] Error 1
make[1]: *** [CMakeFiles/Makefile2:79: CMakeFiles/zed_camera_component.dir/all] Error 2
make: *** [Makefile:141: all] Error 2
Successful colcon build
Colcon build finishes with error
ZED2i
OS: Ubuntu 20.04
GPU: Nvidia GTX 660
ZED SKD: 3.5 (also tried 3.6, gave same error)
Ros2 distro: Foxy. I also have Ros2 Galactic on the computer, but I'm sourcing Foxy before I build this package.
Cuda: 11.0No response
On starting the node, all topics that are advertised are displayed. Only a fraction of them actually publish anything. Critically, depth images or stereo images are not published, while IMU and zed_node/stereo/image_rect_color are published.
In a Docker environment running on Jetson AGX Xavier, build ZED SDK and Zed Wrapper:
ARG BASE_IMAGE=nvcr.io/nvidia/l4t-base:r32.5.0
FROM ${BASE_IMAGE}
[...]
RUN apt-get update -y && apt-get install --no-install-recommends lsb-release wget less udev sudo build-essential cmake -y && \
wget -q --no-check-certificate -O ZED_SDK_Linux_JP.run https://download.stereolabs.com/zedsdk/3.5/jp45/jetsons && \
chmod +x ZED_SDK_Linux_JP.run ; ./ZED_SDK_Linux_JP.run silent skip_tools && \
rm -rf /usr/local/zed/resources/* \
rm -rf ZED_SDK_Linux_JP.run && \
rm -rf /var/lib/apt/lists/*
[...]
ARG ROS_ENVIRONMENT=${ROS_ROOT}/install/setup.bash
RUN source ${ROS_ENVIRONMENT} && \
cd ${ROS_ROOT} && \
mkdir src/slam && \
rosinstall_generator --exclude-path ${ROS_ROOT}/src --rosdistro ${ROS_DISTRO} \
diagnostic_updater \
xacro \
> ros2.${ROS_DISTRO}.zed.rosinstall && \
cat ros2.${ROS_DISTRO}.zed.rosinstall && \
vcs import src/slam < ros2.${ROS_DISTRO}.zed.rosinstall && \
apt-get update && \
rosdep install --from-paths src/slam --ignore-src --rosdistro ${ROS_DISTRO} -y --skip-keys "Pangolin libopencv-dev libopencv-contrib-dev libopencv-imgproc-dev python-opencv python3-opencv" && \
rm -rf /var/lib/apt/lists/* && \
apt-get clean && \
colcon build --merge-install --base-paths src/slam
RUN source ${ROS_ENVIRONMENT} && \
cd ${ROS_ROOT} && \
git clone https://github.com/stereolabs/zed-ros2-wrapper src/slam/zed-ros2-wrapper && \
apt-get update && \
rosdep install --from-paths src/slam --ignore-src --rosdistro ${ROS_DISTRO} -y --skip-keys "rtabmap find_object_2d Pangolin libopencv-dev libopencv-contrib-dev libopencv-imgproc-dev python-opencv python3-opencv" && \
rm -rf /var/lib/apt/lists/* && \
apt-get clean && \
colcon build --merge-install --base-paths src/slam/zed-ros2-wrapper --cmake-args=-DCMAKE_BUILD_TYPE=Release
/**:
ros__parameters:
general:
svo_file: ''
svo_loop: false # Enable loop mode when using an SVO as input source
svo_realtime: false # if true SVO will be played trying to respect the original framerate eventually skipping frames, otherwise every frame will be processed respecting the `pub_frame_rate` setting
debug_mode: false
camera_timeout_sec: 5
camera_max_reconnect: 5
camera_flip: false
zed_id: 0
serial_number: 0
resolution: 2 # '0': HD2K, '1': HD1080, '2': HD720, '3': VGA
sdk_verbose: true
grab_frame_rate: 30 # ZED SDK internal grabbing rate
pub_frame_rate: 15.0 # [DYNAMIC] - frequency of publishing of visual images and depth images
gpu_id: 0
camera_model: 'zed2'
camera_name: 'zed2'
video:
extrinsic_in_camera_frame: false # if `false` extrinsic parameter in `camera_info` will use ROS native frame (X FORWARD, Z UP) instead of the camera frame (Z FORWARD, Y DOWN) [`true` use old behavior as for version < v3.1]
img_downsample_factor: 0.5 # Resample factor for image data matrices [0.01,1.0] The SDK works with native data sizes, but publishes rescaled matrices
brightness: 4 # [DYNAMIC]
contrast: 4 # [DYNAMIC]
hue: 0 # [DYNAMIC]
saturation: 4 # [DYNAMIC]
sharpness: 4 # [DYNAMIC]
gamma: 8 # [DYNAMIC] - Requires SDK >=v3.1
auto_exposure_gain: true # [DYNAMIC]
exposure: 80 # [DYNAMIC]
gain: 80 # [DYNAMIC]
auto_whitebalance: true # [DYNAMIC]
whitebalance_temperature: 42 # [DYNAMIC] - [28,65] works only if `auto_whitebalance` is false
qos_history: 1 # '1': KEEP_LAST - '2': KEEP_ALL
qos_depth: 1 # Queue size if using KEEP_LAST
qos_reliability: 2 # '1': RELIABLE - '2': BEST_EFFORT -
qos_durability: 2 # '1': TRANSIENT_LOCAL - '2': VOLATILE
depth:
quality: 3 # '0': NONE, '1': PERFORMANCE, '2': QUALITY, '3': ULTRA - Note: if '0' all the modules that requires depth extraction are disabled by default (Pos. Tracking, Obj. Detection, Mapping, ...)
sensing_mode: 0 # '0': STANDARD, '1': FILL
depth_stabilization: true # Forces positional tracking to start if 'true'
openni_depth_mode: false # 'false': 32bit float [meters], 'true': 16bit unsigned int [millimeters]
depth_downsample_factor: 0.5 # Resample factor for depth data matrices [0.01,1.0] The SDK works with native data sizes, but publishes rescaled matrices (depth map, point cloud, ...)
point_cloud_freq: 10.0 # [DYNAMIC] - frequency of the pointcloud publishing (equal or less to `grab_frame_rate` value)
depth_confidence: 50 # [DYNAMIC]
depth_texture_conf: 100 # [DYNAMIC]
qos_history: 1 # '1': KEEP_LAST - '2': KEEP_ALL
qos_depth: 1 # Queue size if using KEEP_LAST
qos_reliability: 2 # '1': RELIABLE - '2': BEST_EFFORT -
qos_durability: 2 # '1': TRANSIENT_LOCAL - '2': VOLATILE
min_depth: 0.3 # Min: 0.2, Max: 3.0 - Default 0.7 - Note: reducing this value wil require more computational power and GPU memory
max_depth: 20.0 # Max: 40.0
pos_tracking:
pos_tracking_enabled: true # True to enable positional tracking from start
publish_tf: false # publish `odom -> base_link` TF
publish_map_tf: false # publish `map -> odom` TF
base_frame: 'base_link' # use the same name as in the URDF file
map_frame: 'map'
odometry_frame: 'odom'
area_memory_db_path: ''
area_memory: true # Enable to detect loop closure
floor_alignment: true # Enable to automatically calculate camera/floor offset
initial_base_pose: [0.0,0.0,0.0, 0.0,0.0,0.0] # Initial position of the `base_frame` -> [X, Y, Z, R, P, Y]
init_odom_with_first_valid_pose: true # Enable to initialize the odometry with the first valid pose
path_pub_rate: 2.0 # [DYNAMIC] - Camera trajectory publishing frequency
path_max_count: -1 # use '-1' for unlimited path size
two_d_mode: true # Force navigation on a plane. If true the Z value will be fixed to "fixed_z_value", roll and pitch to zero
fixed_z_value: 0.00 # Value to be used for Z coordinate if `two_d_mode` is true
qos_history: 1 # '1': KEEP_LAST - '2': KEEP_ALL
qos_depth: 1 # Queue size if using KEEP_LAST
qos_reliability: 2 # '1': RELIABLE - '2': BEST_EFFORT -
qos_durability: 2 # '1': TRANSIENT_LOCAL - '2': VOLATILE
imu_fusion: true # enable/disable IMU fusion. When set to false, only the optical odometry will be used.
publish_imu_tf: true # enable/disable the static IMU TF broadcasting
mapping:
mapping_enabled: false # True to enable mapping and fused point cloud pubblication
resolution: 0.1 # maps resolution in meters [0.01f, 0.2f]
max_mapping_range: 20.0 # maximum depth range while mapping in meters (-1 for automatic calculation) [2.0, 20.0]
fused_pointcloud_freq: 0.5 # frequency of the publishing of the fused colored point cloud
qos_history: 1 # '1': KEEP_LAST - '2': KEEP_ALL
qos_depth: 1 # Queue size if using KEEP_LAST
qos_reliability: 2 # '1': RELIABLE - '2': BEST_EFFORT -
qos_durability: 2 # '1': TRANSIENT_LOCAL - '2': VOLATILE
object_detection:
od_enabled: false # True to enable Object Detection [only ZED 2]
confidence_threshold: 50.0 # [DYNAMIC] - Minimum value of the detection confidence of an object [0,100]
model: 0 # '0': MULTI_CLASS_BOX - '1': MULTI_CLASS_BOX_ACCURATE - '2': HUMAN_BODY_FAST - '3': HUMAN_BODY_ACCURATE - '4': MULTI_CLASS_BOX_MEDIUM - '5': HUMAN_BODY_MEDIUM
mc_people: true # [DYNAMIC] - Enable/disable the detection of persons for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_vehicle: true # [DYNAMIC] - Enable/disable the detection of vehicles for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_bag: true # [DYNAMIC] - Enable/disable the detection of bags for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_animal: true # [DYNAMIC] - Enable/disable the detection of animals for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_electronics: true # [DYNAMIC] - Enable/disable the detection of electronic devices for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_fruit_vegetable: true # [DYNAMIC] - Enable/disable the detection of fruits and vegetables for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
body_fitting: false # Enable/disable body fitting for 'HUMAN_BODY_FAST' and 'HUMAN_BODY_ACCURATE' models
qos_history: 1 # '1': KEEP_LAST - '2': KEEP_ALL
qos_depth: 1 # Queue size if using KEEP_LAST
qos_reliability: 2 # '1': RELIABLE - '2': BEST_EFFORT -
qos_durability: 2 # '1': TRANSIENT_LOCAL - '2': VOLATILE
sensors:
sensors_image_sync: false # Synchronize Sensors messages with latest published video/depth message
sensors_pub_rate: 200. # frequency of publishing of sensors data. MAX: 400. - MIN: grab rate
qos_history: 1 # '1': KEEP_LAST - '2': KEEP_ALL
qos_depth: 1 # Queue size if using KEEP_LAST
qos_reliability: 2 # '1': RELIABLE - '2': BEST_EFFORT -
qos_durability: 2 # '1': TRANSIENT_LOCAL - '2': VOLATILE
# ros2 launch hugo rtabmap.py
[INFO] [launch]: All log files can be found below /root/.ros/log/2021-09-22-09-53-37-177059-hugo_ada-4460
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ekf_node-1]: process started with pid [4463]
[INFO] [odrive_ros2_uart-2]: process started with pid [4464]
[INFO] [zed_wrapper-3]: process started with pid [4465]
[INFO] [robot_state_publisher-4]: process started with pid [4466]
[INFO] [rgbd_sync-5]: process started with pid [4467]
[INFO] [rtabmap-6]: process started with pid [4468]
[INFO] [point_cloud_xyz-7]: process started with pid [4477]
[ekf_node-1] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[robot_state_publisher-4] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[robot_state_publisher-4] 1632304417.559410313 [localization.robot_state_publisher] [WARN] use_tf_static is deprecated and will be removed in the future
[robot_state_publisher-4] Parsing robot urdf xml string.
[robot_state_publisher-4] Link camera_back had 0 children
[robot_state_publisher-4] Link camera_front had 1 children
[robot_state_publisher-4] Link zed2_camera_center had 2 children
[robot_state_publisher-4] Link zed2_left_camera_frame had 1 children
[robot_state_publisher-4] Link zed2_left_camera_optical_frame had 0 children
[robot_state_publisher-4] Link zed2_right_camera_frame had 1 children
[robot_state_publisher-4] Link zed2_right_camera_optical_frame had 0 children
[robot_state_publisher-4] Link caster_left had 0 children
[robot_state_publisher-4] Link caster_right had 0 children
[robot_state_publisher-4] Link laser_back had 0 children
[robot_state_publisher-4] Link laser_front had 0 children
[robot_state_publisher-4] 1632304417.575684903 [localization.robot_state_publisher] [INFO] got segment base_link
[robot_state_publisher-4] 1632304417.575842123 [localization.robot_state_publisher] [INFO] got segment camera_back
[robot_state_publisher-4] 1632304417.575909933 [localization.robot_state_publisher] [INFO] got segment camera_front
[robot_state_publisher-4] 1632304417.575974543 [localization.robot_state_publisher] [INFO] got segment caster_left
[robot_state_publisher-4] 1632304417.576028977 [localization.robot_state_publisher] [INFO] got segment caster_right
[robot_state_publisher-4] 1632304417.576086866 [localization.robot_state_publisher] [INFO] got segment laser_back
[robot_state_publisher-4] 1632304417.576141844 [localization.robot_state_publisher] [INFO] got segment laser_front
[robot_state_publisher-4] 1632304417.576206710 [localization.robot_state_publisher] [INFO] got segment zed2_camera_center
[robot_state_publisher-4] 1632304417.576268984 [localization.robot_state_publisher] [INFO] got segment zed2_left_camera_frame
[robot_state_publisher-4] 1632304417.576323897 [localization.robot_state_publisher] [INFO] got segment zed2_left_camera_optical_frame
[robot_state_publisher-4] 1632304417.576381979 [localization.robot_state_publisher] [INFO] got segment zed2_right_camera_frame
[robot_state_publisher-4] 1632304417.576436221 [localization.robot_state_publisher] [INFO] got segment zed2_right_camera_optical_frame
[zed_wrapper-3] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[zed_wrapper-3] 1632304417.585981396 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[zed_wrapper-3] 1632304417.586106232 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[zed_wrapper-3] 1632304417.586934000 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[zed_wrapper-3] 1632304417.589518172 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[zed_wrapper-3] 1632304417.589604799 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[zed_wrapper-3] 1632304417.589991914 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[zed_wrapper-3] 1632304417.651718780 [sensors.zed_node] [INFO] ********************************
[zed_wrapper-3] 1632304417.652116328 [sensors.zed_node] [INFO] ZED Camera Component
[zed_wrapper-3] 1632304417.652244715 [sensors.zed_node] [INFO] ********************************
[zed_wrapper-3] 1632304417.652327502 [sensors.zed_node] [INFO] * namespace: /sensors
[zed_wrapper-3] 1632304417.652381007 [sensors.zed_node] [INFO] * node name: zed_node
[zed_wrapper-3] 1632304417.652428145 [sensors.zed_node] [INFO] ********************************
[zed_wrapper-3] 1632304417.652995457 [sensors.zed_node] [INFO] *** DEBUG parameters ***
[zed_wrapper-3] 1632304417.653113285 [sensors.zed_node] [INFO] *** GENERAL parameters ***
[zed_wrapper-3] 1632304417.653533873 [sensors.zed_node] [INFO] * Camera model: zed2 - ZED 2
[zed_wrapper-3] 1632304417.653937789 [sensors.zed_node] [INFO] * SDK Verbose: 1
[zed_wrapper-3] 1632304417.654344841 [sensors.zed_node] [INFO] * SVO:
[zed_wrapper-3] 1632304417.654699347 [sensors.zed_node] [INFO] * SVO Loop: FALSE
[zed_wrapper-3] 1632304417.656247681 [sensors.zed_node] [INFO] * SVO Realtime: FALSE
[zed_wrapper-3] 1632304417.656731567 [sensors.zed_node] [INFO] * Camera name: zed2
[zed_wrapper-3] 1632304417.657113690 [sensors.zed_node] [INFO] * Camera ID: 0
[zed_wrapper-3] 1632304417.657504294 [sensors.zed_node] [INFO] * Camera SN: 0
[zed_wrapper-3] 1632304417.657862608 [sensors.zed_node] [INFO] * Camera timeout [sec]: 5
[zed_wrapper-3] 1632304417.658259548 [sensors.zed_node] [INFO] * Camera reconnection temptatives: 5
[zed_wrapper-3] 1632304417.658575941 [sensors.zed_node] [INFO] * Camera framerate: 30
[zed_wrapper-3] 1632304417.658990001 [sensors.zed_node] [INFO] * GPU ID: 0
[zed_wrapper-3] 1632304417.659346780 [sensors.zed_node] [INFO] * Camera resolution: 2 - HD720
[zed_wrapper-3] 1632304417.659653541 [sensors.zed_node] [INFO] * Camera self calibration: TRUE
[zed_wrapper-3] 1632304417.659973454 [sensors.zed_node] [INFO] * Camera flip: FALSE
[zed_wrapper-3] 1632304417.660298519 [sensors.zed_node] [INFO] * [DYN] Publish framerate [Hz]: 15
[zed_wrapper-3] 1632304417.660387578 [sensors.zed_node] [INFO] *** VIDEO parameters ***
[zed_wrapper-3] 1632304417.660727460 [sensors.zed_node] [INFO] * Use old extrinsic parameters: 0
[zed_wrapper-3] 1632304417.661043725 [sensors.zed_node] [INFO] * [DYN] Image downsample factor: 0.5
[zed_wrapper-3] 1632304417.661385175 [sensors.zed_node] [INFO] * [DYN] Brightness: 4
[zed_wrapper-3] 1632304417.661727393 [sensors.zed_node] [INFO] * [DYN] Contrast: 4
[zed_wrapper-3] 1632304417.662124077 [sensors.zed_node] [INFO] * [DYN] Hue: 0
[zed_wrapper-3] 1632304417.662447703 [sensors.zed_node] [INFO] * [DYN] Saturation: 4
[zed_wrapper-3] 1632304417.662768608 [sensors.zed_node] [INFO] * [DYN] Sharpness: 4
[zed_wrapper-3] 1632304417.663146955 [sensors.zed_node] [INFO] * [DYN] Gamma: 8
[zed_wrapper-3] 1632304417.663481205 [sensors.zed_node] [INFO] * [DYN] Auto Exposure/Gain: TRUE
[zed_wrapper-3] 1632304417.663821471 [sensors.zed_node] [INFO] * [DYN] Exposure: 80
[zed_wrapper-3] 1632304417.664170313 [sensors.zed_node] [INFO] * [DYN] Gain: 80
[zed_wrapper-3] 1632304417.664503187 [sensors.zed_node] [INFO] * [DYN] Auto White Balance: TRUE
[zed_wrapper-3] 1632304417.664831964 [sensors.zed_node] [INFO] * [DYN] White Balance Temperature: 42
[zed_wrapper-3] 1632304417.665168230 [sensors.zed_node] [INFO] * Video QoS History: KEEP_LAST
[zed_wrapper-3] 1632304417.665528529 [sensors.zed_node] [INFO] * Video QoS History depth: 1
[zed_wrapper-3] 1632304417.665876251 [sensors.zed_node] [INFO] * Video QoS Reliability: BEST_EFFORT
[zed_wrapper-3] 1632304417.666266022 [sensors.zed_node] [INFO] * Video QoS Durability: VOLATILE
[zed_wrapper-3] 1632304417.666355113 [sensors.zed_node] [INFO] *** DEPTH parameters ***
[zed_wrapper-3] 1632304417.666678067 [sensors.zed_node] [INFO] * Depth quality: 1 - PERFORMANCE
[zed_wrapper-3] 1632304417.667022781 [sensors.zed_node] [INFO] * Depth downsample factor: 0.5
[zed_wrapper-3] 1632304417.667429865 [sensors.zed_node] [INFO] * Min depth [m]: 0.3
[zed_wrapper-3] 1632304417.667782195 [sensors.zed_node] [INFO] * Max depth [m]: 20
[zed_wrapper-3] 1632304417.668122173 [sensors.zed_node] [INFO] * Depth Sensing Mode: 1 - FILL
[zed_wrapper-3] 1632304417.668509224 [sensors.zed_node] [INFO] * Depth Stabilization: TRUE
[zed_wrapper-3] 1632304417.668829426 [sensors.zed_node] [INFO] * OpenNI mode (16bit point cloud): FALSE
[zed_wrapper-3] 1632304417.669209981 [sensors.zed_node] [INFO] * [DYN] Point cloud rate [Hz]: 10
[zed_wrapper-3] 1632304417.669579656 [sensors.zed_node] [INFO] * [DYN] Depth Confidence: 50
[zed_wrapper-3] 1632304417.669925074 [sensors.zed_node] [INFO] * [DYN] Depth Texture Confidence: 100
[zed_wrapper-3] 1632304417.670286812 [sensors.zed_node] [INFO] * Depth QoS History: KEEP_LAST
[zed_wrapper-3] 1632304417.670627750 [sensors.zed_node] [INFO] * Depth QoS History depth: 1
[zed_wrapper-3] 1632304417.671027026 [sensors.zed_node] [INFO] * Depth QoS Reliability: BEST_EFFORT
[zed_wrapper-3] 1632304417.671442110 [sensors.zed_node] [INFO] * Depth QoS Durability: TRANSIENT_LOCAL
[zed_wrapper-3] 1632304417.671536001 [sensors.zed_node] [INFO] *** POSITIONAL TRACKING parameters ***
[zed_wrapper-3] 1632304417.671884619 [sensors.zed_node] [INFO] * Positional tracking enabled: TRUE
[zed_wrapper-3] 1632304417.672243446 [sensors.zed_node] [INFO] * Base frame id: base_link
[zed_wrapper-3] 1632304417.672592736 [sensors.zed_node] [INFO] * Map frame id: map
[zed_wrapper-3] 1632304417.672944906 [sensors.zed_node] [INFO] * Odometry frame id: odom
[zed_wrapper-3] 1632304417.673295893 [sensors.zed_node] [INFO] * Broadcast Odometry TF: FALSE
[zed_wrapper-3] 1632304417.673716641 [sensors.zed_node] [INFO] * [DYN] Path publishing rate: 2
[zed_wrapper-3] 1632304417.674051851 [sensors.zed_node] [INFO] * Path history lenght: -1
[zed_wrapper-3] 1632304417.674469623 [sensors.zed_node] [INFO] * Initial pose: [0,0,0,0,0,0,]
[zed_wrapper-3] 1632304417.674835330 [sensors.zed_node] [INFO] * Area Memory: TRUE
[zed_wrapper-3] 1632304417.675280399 [sensors.zed_node] [INFO] * Area Memory DB:
[zed_wrapper-3] 1632304417.675649018 [sensors.zed_node] [INFO] * IMU Fusion [not for ZED]: TRUE
[zed_wrapper-3] 1632304417.675982851 [sensors.zed_node] [INFO] * Floor Alignment: TRUE
[zed_wrapper-3] 1632304417.676346478 [sensors.zed_node] [INFO] * Init Odometry with first valid pose data: TRUE
[zed_wrapper-3] 1632304417.676657879 [sensors.zed_node] [INFO] * 2D mode: TRUE
[zed_wrapper-3] 1632304417.677114693 [sensors.zed_node] [INFO] * Fixed Z value: 0
[zed_wrapper-3] 1632304417.677453582 [sensors.zed_node] [INFO] * Pose/Odometry QoS History: KEEP_LAST
[zed_wrapper-3] 1632304417.677777176 [sensors.zed_node] [INFO] * Pose/Odometry QoS History depth: 1
[zed_wrapper-3] 1632304417.678128418 [sensors.zed_node] [INFO] * Pose/Odometry QoS Reliability: BEST_EFFORT
[zed_wrapper-3] 1632304417.678464844 [sensors.zed_node] [INFO] * Pose/Odometry QoS Durability: VOLATILE
[zed_wrapper-3] 1632304417.678538254 [sensors.zed_node] [INFO] *** SENSORS STACK parameters ***
[zed_wrapper-3] 1632304417.678953114 [sensors.zed_node] [INFO] * Sensors Camera Sync: TRUE
[zed_wrapper-3] 1632304417.680450918 [sensors.zed_node] [INFO] * Sensors publishing rate: 200 Hz
[zed_wrapper-3] 1632304417.680851282 [sensors.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-3] 1632304417.681263550 [sensors.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-3] 1632304417.681615913 [sensors.zed_node] [INFO] * Sensors QoS Reliability: BEST_EFFORT
[zed_wrapper-3] 1632304417.682015252 [sensors.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-3] 1632304417.682100119 [sensors.zed_node] [INFO] *** Spatial Mapping parameters ***
[zed_wrapper-3] 1632304417.682441057 [sensors.zed_node] [INFO] * Spatial Mapping Enabled: FALSE
[zed_wrapper-3] 1632304417.682812524 [sensors.zed_node] [INFO] * Spatial Mapping resolution [m]: 0.1
[zed_wrapper-3] 1632304417.683219736 [sensors.zed_node] [INFO] * 3D Max Mapping range [m]: 20
[zed_wrapper-3] 1632304417.683559394 [sensors.zed_node] [INFO] * Map publishing rate [Hz]: 0.5
[zed_wrapper-3] 1632304417.683897611 [sensors.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-3] 1632304417.684213653 [sensors.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-3] 1632304417.684538334 [sensors.zed_node] [INFO] * Sensors QoS Reliability: BEST_EFFORT
[zed_wrapper-3] 1632304417.684913353 [sensors.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-3] 1632304417.684986411 [sensors.zed_node] [INFO] *** OBJECT DETECTION parameters ***
[zed_wrapper-3] 1632304417.685291316 [sensors.zed_node] [INFO] * Object Detection enabled: FALSE
[zed_wrapper-3] 1632304417.685634238 [sensors.zed_node] [INFO] * OD min. confidence: 50
[zed_wrapper-3] 1632304417.686003753 [sensors.zed_node] [INFO] * Object Detection model: 0 - MULTI CLASS BOX FAST
[zed_wrapper-3] 1632304417.686331859 [sensors.zed_node] [INFO] * MultiClassBox people: TRUE
[zed_wrapper-3] 1632304417.686679901 [sensors.zed_node] [INFO] * MultiClassBox vehicles: TRUE
[zed_wrapper-3] 1632304417.687043144 [sensors.zed_node] [INFO] * MultiClassBox bags: TRUE
[zed_wrapper-3] 1632304417.687416915 [sensors.zed_node] [INFO] * MultiClassBox animals: TRUE
[zed_wrapper-3] 1632304417.687781213 [sensors.zed_node] [INFO] * MultiClassBox electronics: TRUE
[zed_wrapper-3] 1632304417.688146440 [sensors.zed_node] [INFO] * MultiClassBox fruits and vegetables: TRUE
[zed_wrapper-3] 1632304417.688466353 [sensors.zed_node] [INFO] * Skeleton fitting: FALSE
[zed_wrapper-3] 1632304417.688804059 [sensors.zed_node] [INFO] * Obj. Det. QoS History: KEEP_LAST
[zed_wrapper-3] 1632304417.689105700 [sensors.zed_node] [INFO] * Obj. Det. QoS History depth: 1
[zed_wrapper-3] 1632304417.689573010 [sensors.zed_node] [INFO] * Obj. Det. QoS Reliability: BEST_EFFORT
[zed_wrapper-3] 1632304417.689886843 [sensors.zed_node] [INFO] * Obj. Det. QoS Durability: VOLATILE
[zed_wrapper-3] 1632304417.690144131 [sensors.zed_node] [INFO] *** SERVICES ***
[zed_wrapper-3] 1632304417.692003705 [sensors.zed_node] [INFO] * '/sensors/zed_node/reset_odometry'
[zed_wrapper-3] 1632304417.693423235 [sensors.zed_node] [INFO] * '/sensors/zed_node/reset_pos_tracking'
[zed_wrapper-3] 1632304417.695982702 [sensors.zed_node] [INFO] * '/sensors/zed_node/set_pose'
[zed_wrapper-3] 1632304417.697611294 [sensors.zed_node] [INFO] * '/sensors/zed_node/enable_obj_det'
[zed_wrapper-3] 1632304417.698987526 [sensors.zed_node] [INFO] * '/sensors/zed_node/enable_mapping'
[zed_wrapper-3] 1632304417.700605525 [sensors.zed_node] [INFO] * '/sensors/zed_node/start_svo_rec'
[zed_wrapper-3] 1632304417.701787960 [sensors.zed_node] [INFO] * '/sensors/zed_node/stop_svo_rec'
[zed_wrapper-3] 1632304417.703195873 [sensors.zed_node] [INFO] * '/sensors/zed_node/toggle_svo_pause'
[zed_wrapper-3] 1632304417.703318021 [sensors.zed_node] [INFO] ***** STARTING CAMERA *****
[zed_wrapper-3] 1632304417.703401671 [sensors.zed_node] [INFO] SDK Version: 3.5.3 - Build 28371_2336704c
[zed_wrapper-3] 1632304417.737327210 [sensors.zed_node] [INFO] *** CAMERA OPENING ***
[odrive_ros2_uart-2] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[point_cloud_xyz-7] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[point_cloud_xyz-7] 1632304418.519125382 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[point_cloud_xyz-7] 1632304418.519230825 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[point_cloud_xyz-7] 1632304418.519867388 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[point_cloud_xyz-7] 1632304418.522058493 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[point_cloud_xyz-7] 1632304418.522111294 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[point_cloud_xyz-7] 1632304418.522371462 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[point_cloud_xyz-7] 1632304418.623756338 [pointcloud] [INFO] Approximate time sync = true
[rgbd_sync-5] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[rgbd_sync-5] 1632304418.641516126 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rgbd_sync-5] 1632304418.641830535 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rgbd_sync-5] 1632304418.645006309 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rgbd_sync-5] 1632304418.651911824 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rgbd_sync-5] 1632304418.652026036 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rgbd_sync-5] 1632304418.652421887 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[odrive_ros2_uart-2] 1632304418.689967986 [actuators.esc.odrive_interface_UART] [INFO] Starting odrive node
[rtabmap-6] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[rtabmap-6] 1632304418.781888648 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rtabmap-6] 1632304418.782004331 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rtabmap-6] 1632304418.784719099 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rtabmap-6] 1632304418.788157856 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_depth_image_transport/compressed_depth_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rtabmap-6] 1632304418.788227747 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/opt/ros/foxy/install/share/compressed_image_transport/compressed_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[rtabmap-6] 1632304418.788539756 [pluginlib.ClassLoader] [ERROR] Skipped loading plugin with error: XML Document '/src/workspace/install/theora_image_transport/share/theora_image_transport/theora_plugins.xml' has no Root Element. This likely means the XML is malformed or missing..
[odrive_ros2_uart-2] 1632304418.803815086 [actuators.esc.odrive_interface_UART] [INFO] Connecting to odrive...
[odrive_ros2_uart-2] 1632304418.815775439 [actuators.esc.odrive_interface_UART] [INFO] Connected to ODrive with serial number b'lu\r\n'
[rgbd_sync-5] 1632304418.829513860 [rbgd_sync] [INFO] rbgd_sync: approx_sync = true
[rgbd_sync-5] 1632304418.834636987 [rbgd_sync] [INFO] rbgd_sync: queue_size = 10
[rgbd_sync-5] 1632304418.836435184 [rbgd_sync] [INFO] rbgd_sync: depth_scale = 1.000000
[rgbd_sync-5] 1632304418.838055007 [rbgd_sync] [INFO] rbgd_sync: compressed_rate = 0.000000
[rtabmap-6] 1632304418.901692595 [rtabmap] [INFO] rtabmap: subscribe_depth = false
[rtabmap-6] 1632304418.902238275 [rtabmap] [INFO] rtabmap: subscribe_rgb = false
[rtabmap-6] 1632304418.902326598 [rtabmap] [INFO] rtabmap: subscribe_stereo = false
[rtabmap-6] 1632304418.902384680 [rtabmap] [INFO] rtabmap: subscribe_rgbd = true (rgbd_cameras=1)
[rtabmap-6] 1632304418.902437897 [rtabmap] [INFO] rtabmap: subscribe_odom_info = false
[rtabmap-6] 1632304418.902488331 [rtabmap] [INFO] rtabmap: subscribe_user_data = false
[rtabmap-6] 1632304418.902579629 [rtabmap] [INFO] rtabmap: subscribe_scan = false
[rtabmap-6] 1632304418.902633519 [rtabmap] [INFO] rtabmap: subscribe_scan_cloud = false
[rtabmap-6] 1632304418.902682992 [rtabmap] [INFO] rtabmap: queue_size = 10
[rtabmap-6] 1632304418.902738898 [rtabmap] [INFO] rtabmap: approx_sync = false
[rtabmap-6] 1632304418.909669598 [rtabmap] [INFO] rtabmap(maps): map_filter_radius = 0.000000
[rtabmap-6] 1632304418.909814115 [rtabmap] [INFO] rtabmap(maps): map_filter_angle = 30.000000
[rtabmap-6] 1632304418.909879300 [rtabmap] [INFO] rtabmap(maps): map_cleanup = true
[rtabmap-6] 1632304418.909949511 [rtabmap] [INFO] rtabmap(maps): map_always_update = true
[rtabmap-6] 1632304418.910012040 [rtabmap] [INFO] rtabmap(maps): map_empty_ray_tracing = true
[rtabmap-6] 1632304418.910065706 [rtabmap] [INFO] rtabmap(maps): cloud_output_voxelized = true
[rtabmap-6] 1632304418.910115659 [rtabmap] [INFO] rtabmap(maps): cloud_subtract_filtering = false
[rtabmap-6] 1632304418.910164653 [rtabmap] [INFO] rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[rgbd_sync-5] 1632304418.938951805 [rbgd_sync] [INFO]
[rgbd_sync-5] rbgd_sync subscribed to (approx sync):
[rgbd_sync-5] /sensors/zed_node/stereo/image_rect_color,
[rgbd_sync-5] /sensors/zed_node/depth/depth_registered,
[rgbd_sync-5] rgb/camera_info
[rtabmap-6] 1632304418.968051095 [rtabmap] [INFO] rtabmap: frame_id = base_link
[rtabmap-6] 1632304418.969301276 [rtabmap] [INFO] rtabmap: odom_frame_id = odom
[rtabmap-6] 1632304418.969377950 [rtabmap] [INFO] rtabmap: map_frame_id = map
[rtabmap-6] 1632304418.969428128 [rtabmap] [INFO] rtabmap: use_action_for_goal = false
[rtabmap-6] 1632304418.969474433 [rtabmap] [INFO] rtabmap: tf_delay = 0.050000
[rtabmap-6] 1632304418.969534339 [rtabmap] [INFO] rtabmap: tf_tolerance = 0.100000
[rtabmap-6] 1632304418.969584260 [rtabmap] [INFO] rtabmap: odom_sensor_sync = false
[rtabmap-6] 1632304419.039643995 [rtabmap] [INFO] Setting RTAB-Map parameter "Grid/RayTracing"="True"
[rtabmap-6] 1632304419.239532221 [rtabmap] [INFO] RTAB-Map detection rate = 1.000000 Hz
[rtabmap-6] 1632304419.239868007 [rtabmap] [INFO] rtabmap: Using database from "/root/.ros/rtabmap.db" (1924 MB).
[zed_wrapper-3] 1632304420.082662717 [sensors.zed_node] [INFO] ZED SDK running on GPU #0
[zed_wrapper-3] 1632304420.082983334 [sensors.zed_node] [INFO] * Camera Model -> ZED 2
[zed_wrapper-3] 1632304420.083161996 [sensors.zed_node] [INFO] * Serial Number -> 22535431
[zed_wrapper-3] 1632304420.083325617 [sensors.zed_node] [INFO] * Input type -> USB input type
[zed_wrapper-3] 1632304420.083414483 [sensors.zed_node] [INFO] * Camera FW Version -> 1523
[zed_wrapper-3] 1632304420.083490613 [sensors.zed_node] [INFO] * Sensors FW Version -> 776
[zed_wrapper-3] 1632304420.083730205 [sensors.zed_node] [INFO] *** TF FRAMES ***
[zed_wrapper-3] 1632304420.083830016 [sensors.zed_node] [INFO] * Map -> map
[zed_wrapper-3] 1632304420.083891969 [sensors.zed_node] [INFO] * Odometry -> odom
[zed_wrapper-3] 1632304420.083974244 [sensors.zed_node] [INFO] * Base -> base_link
[zed_wrapper-3] 1632304420.084034726 [sensors.zed_node] [INFO] * Camera -> zed2_camera_center
[zed_wrapper-3] 1632304420.084092103 [sensors.zed_node] [INFO] * Left -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.084146505 [sensors.zed_node] [INFO] * Left Optical -> zed2_left_camera_optical_frame
[zed_wrapper-3] 1632304420.084206955 [sensors.zed_node] [INFO] * RGB -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.084285133 [sensors.zed_node] [INFO] * RGB Optical -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.084370192 [sensors.zed_node] [INFO] * Right -> zed2_right_camera_frame
[zed_wrapper-3] 1632304420.084450706 [sensors.zed_node] [INFO] * Right Optical -> zed2_right_camera_optical_frame
[zed_wrapper-3] 1632304420.084524948 [sensors.zed_node] [INFO] * Depth -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.084582550 [sensors.zed_node] [INFO] * Depth Optical -> zed2_left_camera_optical_frame
[zed_wrapper-3] 1632304420.084637304 [sensors.zed_node] [INFO] * Point Cloud -> zed2_left_camera_optical_frame
[zed_wrapper-3] 1632304420.084691161 [sensors.zed_node] [INFO] * Disparity -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.084745499 [sensors.zed_node] [INFO] * Disparity Optical -> zed2_left_camera_optical_frame
[zed_wrapper-3] 1632304420.084821949 [sensors.zed_node] [INFO] * Confidence -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.084881727 [sensors.zed_node] [INFO] * Confidence Optical -> zed2_left_camera_optical_frame
[zed_wrapper-3] 1632304420.084936961 [sensors.zed_node] [INFO] * IMU -> zed2_imu_link
[zed_wrapper-3] 1632304420.084991234 [sensors.zed_node] [INFO] * Barometer -> zed2_camera_center
[zed_wrapper-3] 1632304420.085057316 [sensors.zed_node] [INFO] * Magnetometer -> zed2_imu_link
[zed_wrapper-3] 1632304420.085113670 [sensors.zed_node] [INFO] * Left Temperature -> zed2_left_camera_frame
[zed_wrapper-3] 1632304420.085168359 [sensors.zed_node] [INFO] * Right Temperature -> zed2_right_camera_frame
[zed_wrapper-3] 1632304420.085269034 [sensors.zed_node] [INFO] *** PUBLISHED TOPICS ***
[zed_wrapper-3] 1632304420.097426260 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/rgb/image_rect_color
[zed_wrapper-3] 1632304420.100676533 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/rgb/image_rect_gray
[zed_wrapper-3] 1632304420.100860155 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/rgb/camera_info
[zed_wrapper-3] 1632304420.103807154 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/rgb_raw/image_raw_color
[zed_wrapper-3] 1632304420.106584293 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-3] 1632304420.106814924 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/rgb_raw/camera_info
[zed_wrapper-3] 1632304420.110523546 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left/image_rect_color
[zed_wrapper-3] 1632304420.113522772 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left/image_rect_gray
[zed_wrapper-3] 1632304420.113672184 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left/camera_info
[zed_wrapper-3] 1632304420.116469228 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left_raw/image_raw_color
[zed_wrapper-3] 1632304420.119097498 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left_raw/image_raw_gray
[zed_wrapper-3] 1632304420.119251326 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left_raw/camera_info
[zed_wrapper-3] 1632304420.121708488 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/right/image_rect_color
[zed_wrapper-3] 1632304420.124350326 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/right/image_rect_gray
[zed_wrapper-3] 1632304420.124508283 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/right/camera_info
[zed_wrapper-3] 1632304420.127130313 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/right_raw/image_raw_color
[zed_wrapper-3] 1632304420.130021055 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/right_raw/image_raw_gray
[zed_wrapper-3] 1632304420.130171876 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/right_raw/camera_info
[zed_wrapper-3] 1632304420.132841875 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/depth/depth_registered
[zed_wrapper-3] 1632304420.134124793 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/depth/camera_info
[zed_wrapper-3] 1632304420.135812268 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/stereo/image_rect_color
[zed_wrapper-3] 1632304420.137303800 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/stereo_raw/image_raw_color
[zed_wrapper-3] 1632304420.138592798 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/confidence/confidence_map
[zed_wrapper-3] 1632304420.140780447 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/disparity/disparity_image
[zed_wrapper-3] 1632304420.142287372 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/point_cloud/cloud_registered
[zed_wrapper-3] 1632304420.143838043 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/pose
[zed_wrapper-3] 1632304420.145257797 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/pose_with_covariance
[zed_wrapper-3] 1632304420.147661068 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/odom
[zed_wrapper-3] 1632304420.149159225 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/path_map
[zed_wrapper-3] 1632304420.150368637 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/path_odom
[zed_wrapper-3] 1632304420.151871690 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/imu/data
[zed_wrapper-3] 1632304420.153112239 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/imu/data_raw
[zed_wrapper-3] 1632304420.154259377 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/temperature/imu
[zed_wrapper-3] 1632304420.155523767 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/imu/mag
[zed_wrapper-3] 1632304420.156718138 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/atm_press
[zed_wrapper-3] 1632304420.157728600 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/temperature/left
[zed_wrapper-3] 1632304420.158688117 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/temperature/right
[zed_wrapper-3] 1632304420.160155328 [sensors.zed_node] [INFO] Advertised on topic: /sensors/zed_node/left_cam_imu_transform [LATCHED]
[zed_wrapper-3] 1632304420.160262404 [sensors.zed_node] [INFO] Camera-IMU Translation:
[zed_wrapper-3] -0.002 -0.023 -0.002
[zed_wrapper-3] 1632304420.161459623 [sensors.zed_node] [INFO] Camera-IMU Rotation:
[zed_wrapper-3] 7FE70BCB08
[zed_wrapper-3] 0.999988 0.004578 -0.001661
[zed_wrapper-3] -0.004582 0.999987 -0.002388
[zed_wrapper-3] 0.001650 0.002396 0.999996
[zed_wrapper-3]
[zed_wrapper-3] 1632304420.161953302 [sensors.zed_node] [INFO] Published static TF: 'zed2_imu_link' -> 'zed2_left_camera_frame'
[zed_wrapper-3] 1632304420.215573011 [sensors.zed_node] [INFO] *** Starting Positional Tracking ***
[zed_wrapper-3] 1632304420.215856123 [sensors.zed_node] [INFO] * Waiting for valid static transformations...
[zed_wrapper-3] 1632304420.216848473 [sensors.zed_node] [INFO] Static transform Sensor to Base [zed2_left_camera_frame -> base_link]
[zed_wrapper-3] 1632304420.216958172 [sensors.zed_node] [INFO] * Translation: {-0.075,0.055,-0.175}
[zed_wrapper-3] 1632304420.217029630 [sensors.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-3] 1632304420.217420394 [sensors.zed_node] [INFO] Static transform Sensor to Camera Center [zed2_left_camera_frame -> zed2_camera_center]
[zed_wrapper-3] 1632304420.217490860 [sensors.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-3] 1632304420.217550126 [sensors.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-3] 1632304420.217656977 [sensors.zed_node] [INFO] Static transform Camera Center to Base [zed2_camera_center -> base_link]
[zed_wrapper-3] 1632304420.217749268 [sensors.zed_node] [INFO] * Translation: {-0.075,0.115,-0.175}
[zed_wrapper-3] 1632304420.217862935 [sensors.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-3] 1632304420.318056735 [sensors.zed_node] [INFO] Initial ZED left camera pose (ZED pos. tracking):
[zed_wrapper-3] 1632304420.319524874 [sensors.zed_node] [INFO] * T: [0.075,-0.0545,0.175]
[zed_wrapper-3] 1632304420.319671023 [sensors.zed_node] [INFO] * Q: [0,0,0,1]
[zed_wrapper-3] 1632304420.842024146 [sensors.zed_node] [INFO] Odometry aligned to last tracking pose
[...]
ros2 topic hz /sensors/zed_node/depth/depth_registered. Observe lack of output.ros2 topic hz /sensors/zed_node/rgb/image_rect_color. Revel at the correct amount of output.I expect that any advertised topic produce data. In particular, that stereo, depth, rectified and associated camera infos are published.
Some topics produce data, but most do not.
ZED2
OS: Ubuntu 18.04, from docker image above
CPU: ARM
GPU: Nvidia Jetson AGX Xavier
Other info: ROS2, Foxy. Many packages are built before Zed is built, but they have been left out for brevity. Do tell me if you want a full list.For the record, running ros2 launch zed_wrapper zed2.launch.py gives the same behavior.
Hi,
I'm trying to save area map. For this I have modified zed_wrapper_nodelet.cpp
Unfortunately, sl::ERROR_CODE err = mZed.saveAreaMap returned FAILURE, but map.txt created without issue.
Could you advise me, how to fix issue and what is wrong?
Configuration: Zedm, SDK 3.1.1, Jetson TX2 4.3
std::ofstream file("/home/jetson/projects/area/map.txt", ios::out | ios::binary);
file << "Writing this to a file.\n";
file.close();
sl::ERROR_CODE err = mZed.saveAreaMap("/home/jetson/projects/area/map.area");
std::cout << "saveAreaMap" << std::endl;
std::cout << err << std::endl;
for (int i = 0; i < 100; i++)
{
sl::AREA_EXPORTING_STATE state = mZed.getAreaExportState();
std::cout << i << " " << state << std::endl;
ros::Duration(0.05).sleep();
}
mZed.close();
Hi team,
I am studying Zed2 camera. I want to record left + right camera with FHD resulotion and maximize FOV?
Can I change FOV of Zed2? Was it configure in calibration process? Should I change it?
Thank team
Hello!
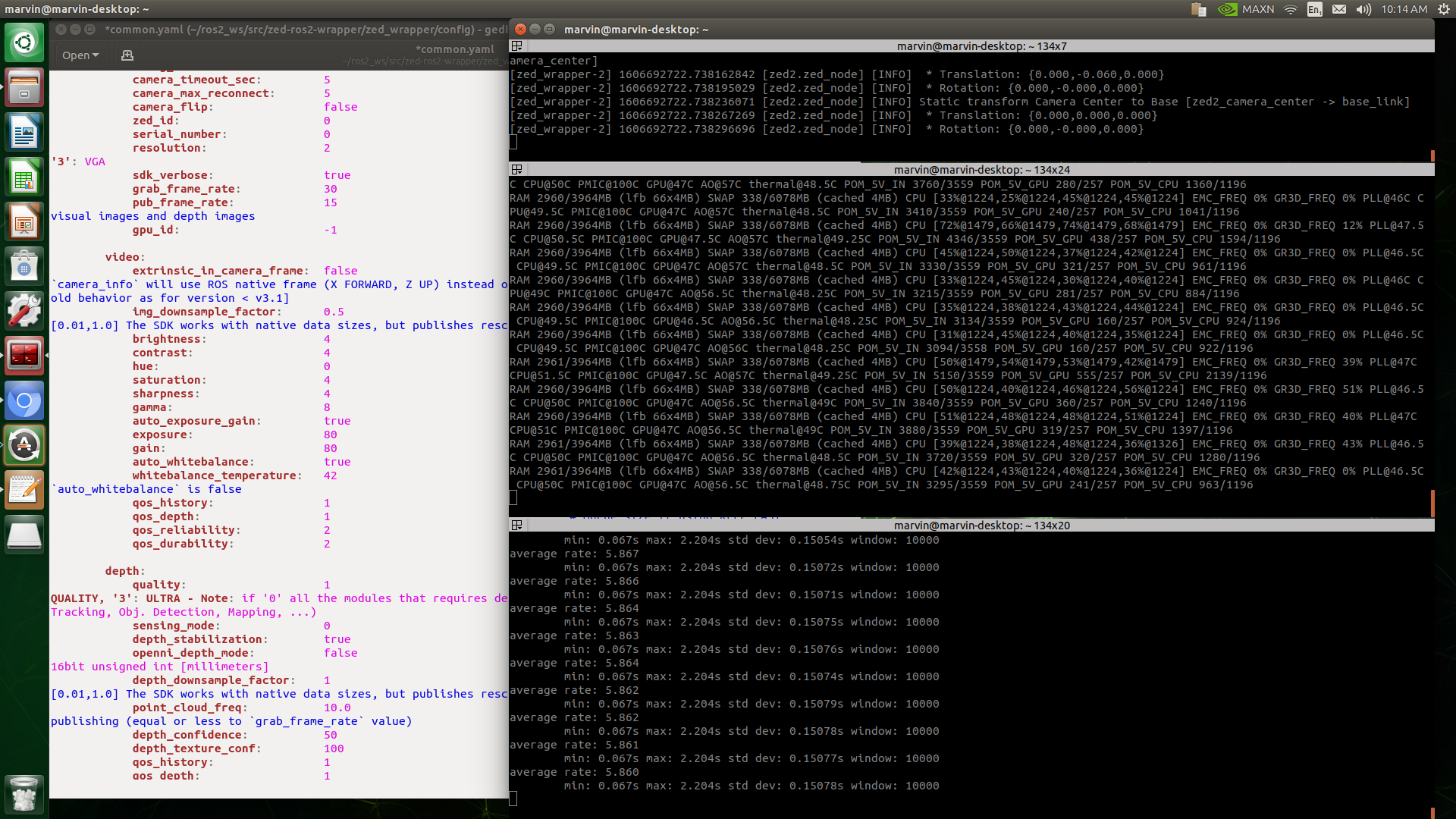
ROS2 zed2 camera produces low camera frame rates (5-8Hz) when published as ROS2 node (lower than publish setting in YAML file, various tried >10Hz) despite no CPU or GPU limitations. GPU frequency reported does oscillate between approximately 5% and 70% between reports (produced by tegrastats). Performance was verified with a fresh system installation with ROS(1), no problems at 15Hz matching YAML settings.
All software latest at time of writing.
Device information:
Attached:
-Screen shot of node Hz publish frequencies and tegrastats report (ROS2)
-Ros2 doctor report
-YAML files (common, ZED2) - for reference
Thanks for your time
Describe the bug
I tried to build the repo and got No module named 'em'
Device information:
To Reproduce
Steps to reproduce the behavior:
installation instructions given in repo
i then install emy via pip but i still get the error
Screenshots

I would like to know which ZED SDK i should use if im using numpy 1.18.5. Since I get following issue in project.
Using python 3.7
import pyzed.sl as sl File "pyzed/sl.pyx", line 1, in init pyzed.sl ValueError: numpy.ndarray size changed, may indicate binary incompatibility. Expected 88 from C header, got 80 from PyObject
thank you
1 package had stderr output: zed_wrapper when building the package of "zed_wrapper"
$ cd ~/ros2_ws/src/ #use your current ros2 workspace folder
$ git clone https://github.com/stereolabs/zed-ros2-wrapper.git
$ cd ..
$ rosdep install --from-paths src --ignore-src -r -y
$ colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
No building issues
stderr issue
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
Starting >>> zed_interfaces
Starting >>> zed_tutorial_depth
Starting >>> zed_tutorial_pos_tracking
Starting >>> zed_tutorial_video
Finished <<< zed_tutorial_depth [8.00s]
Finished <<< zed_tutorial_video [8.48s]
Finished <<< zed_tutorial_pos_tracking [9.85s]
Finished <<< zed_interfaces [13.0s]
Starting >>> zed_components
Starting >>> rviz_plugin_zed_od
Finished <<< rviz_plugin_zed_od [10.7s]
Finished <<< zed_components [23.3s]
Starting >>> zed_wrapper
Starting >>> zed_rgb_convert
--- stderr: zed_wrapper
In file included from /root/colcon_ws/install/zed_components/include/zed_components/sl_tools.h:50,
from /root/colcon_ws/install/zed_components/include/zed_components/zed_camera_component.hpp:29,
from /root/colcon_ws/src/zed-ros2-wrapper/zed_wrapper/src/zed_wrapper.cpp:26:
/usr/local/zed/include/sl/Camera.hpp:784:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
784 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:937:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
937 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1114:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1114 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1278:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1278 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1282:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1282 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1286:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1286 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1526:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1526 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1530:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1530 | };
| ^
/usr/local/zed/include/sl/Camera.hpp:1534:13: warning: ISO C++ prohibits anonymous structs [-Wpedantic]
1534 | };
| ^
/usr/local/zed/include/sl/Camera.hpp: In function ‘sl::Timestamp sl::operator+(sl::Timestamp, const sl::Timestamp&)’:
/usr/local/zed/include/sl/Camera.hpp:1992:16: warning: implicitly-declared ‘constexpr sl::Timestamp::Timestamp(const sl::Timestamp&)’ is deprecated [-Wdeprecated-copy]
1992 | return lhs;
| ^~~
/usr/local/zed/include/sl/Camera.hpp:1931:20: note: because ‘sl::Timestamp’ has user-provided ‘sl::Timestamp& sl::Timestamp::operator=(sl::Timestamp)’
1931 | Timestamp& operator=(Timestamp other) {
| ^~~~~~~~
/usr/local/zed/include/sl/Camera.hpp: In function ‘sl::Timestamp sl::operator-(sl::Timestamp, const sl::Timestamp&)’:
/usr/local/zed/include/sl/Camera.hpp:1997:16: warning: implicitly-declared ‘constexpr sl::Timestamp::Timestamp(const sl::Timestamp&)’ is deprecated [-Wdeprecated-copy]
1997 | return lhs;
| ^~~
/usr/local/zed/include/sl/Camera.hpp:1931:20: note: because ‘sl::Timestamp’ has user-provided ‘sl::Timestamp& sl::Timestamp::operator=(sl::Timestamp)’
1931 | Timestamp& operator=(Timestamp other) {
| ^~~~~~~~
/usr/local/zed/include/sl/Camera.hpp: In function ‘sl::Timestamp sl::operator/(sl::Timestamp, const sl::Timestamp&)’:
/usr/local/zed/include/sl/Camera.hpp:2002:16: warning: implicitly-declared ‘constexpr sl::Timestamp::Timestamp(const sl::Timestamp&)’ is deprecated [-Wdeprecated-copy]
2002 | return lhs;
| ^~~
/usr/local/zed/include/sl/Camera.hpp:1931:20: note: because ‘sl::Timestamp’ has user-provided ‘sl::Timestamp& sl::Timestamp::operator=(sl::Timestamp)’
1931 | Timestamp& operator=(Timestamp other) {
| ^~~~~~~~
/usr/local/zed/include/sl/Camera.hpp: In function ‘sl::Timestamp sl::operator*(sl::Timestamp, const sl::Timestamp&)’:
/usr/local/zed/include/sl/Camera.hpp:2007:16: warning: implicitly-declared ‘constexpr sl::Timestamp::Timestamp(const sl::Timestamp&)’ is deprecated [-Wdeprecated-copy]
2007 | return lhs;
| ^~~
/usr/local/zed/include/sl/Camera.hpp:1931:20: note: because ‘sl::Timestamp’ has user-provided ‘sl::Timestamp& sl::Timestamp::operator=(sl::Timestamp)’
1931 | Timestamp& operator=(Timestamp other) {
| ^~~~~~~~
/usr/local/zed/include/sl/Camera.hpp: In function ‘sl::Timestamp sl::getCurrentTimeStamp()’:
/usr/local/zed/include/sl/Camera.hpp:2041:16: warning: implicitly-declared ‘constexpr sl::Timestamp::Timestamp(const sl::Timestamp&)’ is deprecated [-Wdeprecated-copy]
2041 | return current_ts;
| ^~~~~~~~~~
/usr/local/zed/include/sl/Camera.hpp:1931:20: note: because ‘sl::Timestamp’ has user-provided ‘sl::Timestamp& sl::Timestamp::operator=(sl::Timestamp)’
1931 | Timestamp& operator=(Timestamp other) {
| ^~~~~~~~
/usr/local/zed/include/sl/Camera.hpp: In function ‘cudaError sl::__cudaSafeCall(cudaError, const char*, const char*, int)’:
/usr/local/zed/include/sl/Camera.hpp:2048:89: warning: unused parameter ‘file’ [-Wunused-parameter]
2048 | atic inline cudaError __cudaSafeCall(cudaError err, const char *func, const char *file, const int line) {
| ~~~~~~~~~~~~^~~~
/usr/local/zed/include/sl/Camera.hpp:2048:105: warning: unused parameter ‘line’ [-Wunused-parameter]
2048 | Error __cudaSafeCall(cudaError err, const char *func, const char *file, const int line) {
| ~~~~~~~~~~^~~~
In file included from /root/colcon_ws/install/zed_components/include/zed_components/sl_tools.h:50,
from /root/colcon_ws/install/zed_components/include/zed_components/zed_camera_component.hpp:29,
from /root/colcon_ws/src/zed-ros2-wrapper/zed_wrapper/src/zed_wrapper.cpp:26:
/usr/local/zed/include/sl/Camera.hpp: At global scope:
/usr/local/zed/include/sl/Camera.hpp:5343:12: warning: type qualifiers ignored on function return type [-Wignored-qualifiers]
5343 | inline const void /*@cond SHOWHIDDEN*/SL_SDK_EXPORT/*@endcond*/ getZEDSDKBuildVersion(int &major, int& minor, int& patch) {
| ^~~~~
/usr/local/zed/include/sl/Camera.hpp:5732:2: warning: extra ‘;’ [-Wpedantic]
5732 | };
| ^
---
Finished <<< zed_wrapper [4.80s]
Starting >>> zed_display_rviz2
Starting >>> zed_ros2
Finished <<< zed_ros2 [0.38s]
Finished <<< zed_display_rviz2 [0.79s]
Finished <<< zed_rgb_convert [7.78s]
Summary: 10 packages finished [44.1s]
1 package had stderr output: zed_wrapper
[0.122s] WARNING:colcon.colcon_core.verb:Some selected packages are already built in one or more underlay workspaces:
'image_transport' is in: /root/colcon_ws/install/image_transport, /opt/ros/foxy
'rcpputils' is in: /root/colcon_ws/install/rcpputils, /opt/ros/foxy
'zed_interfaces' is in: /root/colcon_ws/install/zed_interfaces
'zed_tutorial_depth' is in: /root/colcon_ws/install/zed_tutorial_depth
'zed_tutorial_pos_tracking' is in: /root/colcon_ws/install/zed_tutorial_pos_tracking
'zed_tutorial_video' is in: /root/colcon_ws/install/zed_tutorial_video
'camera_calibration_parsers' is in: /root/colcon_ws/install/camera_calibration_parsers
'rviz_plugin_zed_od' is in: /root/colcon_ws/install/rviz_plugin_zed_od
'zed_components' is in: /root/colcon_ws/install/zed_components
'camera_info_manager' is in: /root/colcon_ws/install/camera_info_manager
'zed_rgb_convert' is in: /root/colcon_ws/install/zed_rgb_convert
'zed_wrapper' is in: /root/colcon_ws/install/zed_wrapper
'zed_display_rviz2' is in: /root/colcon_ws/install/zed_display_rviz2
'zed_ros2' is in: /root/colcon_ws/install/zed_ros2
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.
If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding camera_calibration_parsers camera_info_manager image_transport rcpputils rviz_plugin_zed_od zed_components zed_display_rviz2 zed_interfaces zed_rgb_convert zed_ros2 zed_tutorial_depth zed_tutorial_pos_tracking zed_tutorial_video zed_wrapper
This may be promoted to an error in a future release of colcon-core.
Starting >>> image_transport
Starting >>> zed_interfaces
Starting >>> rcpputils
Starting >>> zed_tutorial_depth
Starting >>> zed_tutorial_pos_tracking
Starting >>> zed_tutorial_video
Finished <<< zed_tutorial_depth [0.25s]
Finished <<< zed_tutorial_video [0.25s]
Finished <<< zed_tutorial_pos_tracking [0.26s]
Finished <<< image_transport [0.36s]
Finished <<< rcpputils [0.37s]
Starting >>> camera_calibration_parsers
Finished <<< camera_calibration_parsers [0.15s]
Starting >>> camera_info_manager
Finished <<< zed_interfaces [0.61s]
Starting >>> zed_components
Starting >>> rviz_plugin_zed_od
Finished <<< zed_components [0.14s]
Starting >>> zed_wrapper
Starting >>> zed_rgb_convert
Finished <<< rviz_plugin_zed_od [0.18s]
Finished <<< zed_wrapper [0.15s]
Starting >>> zed_display_rviz2
Starting >>> zed_ros2
Finished <<< zed_rgb_convert [0.18s]
Finished <<< zed_display_rviz2 [0.11s]
Finished <<< zed_ros2 [0.10s]
Finished <<< camera_info_manager [1.42s]
Starting >>> image_common
Finished <<< image_common [0.82s]
Summary: 15 packages finished [2.84s]
ZED2i
OS : Ubuntu 20.04
ROS2 : Foxy
Docker image : stereolabs/zed:3.6-gl-devel-cuda11.4-ubuntu20.04No response
Hello,
I am new to ROS. I have installer ROS 2 Foxy on my Ubuntu 20.04 machine and I would like to use a ZEDM stereo camera to perform SLAM. However, from what I have read, the zed-ros2-wrapper is only compatible with Eloquent and Crystal.
Is this information verified ? Are there new releases coming soon to use ZED cameras on Ubuntu 20.04 ?
Is there another way to use ROS and ZED on Ubuntu 20.04 ?
Thank You !
Unknown CMake command "rclcpp_register_node_plugins"
Wnen I try and run ros2 launch zed_rviz display_zedm.launch.py I get an error stating it can't find zed_rviz. Rebuilt everything and I see zed_rviz being built so not sure what is going on. Launching stereolabs_zed zedm.launch.py works fine. Also there is a typo under Displaying ZED data. The line for zedm is roslaunch zed_rviz display_zedm.launch.py should be ros2 launch instead.
After successfully building the wrapper with colcon, I'm having an error finding libnppc but the library is present at /usr/local/cuda/lib64/libnppc.so.10.0.
In order to revert CUDA to 10.0 I downloaded the .run from here: https://developer.nvidia.com/cuda-10.0-download-archive?target_os=Linux&target_arch=x86_64&target_distro=Ubuntu&target_version=1804&target_type=runfilelocal
Is that the best way to install the correct version of CUDA?
ROS 2 Crystal
Ubuntu 18.04.3
Intel i7 tower with 1080 Ti
CUDA 10.0.130
user@ocu:~/dev/zed_ws$ ros2 launch stereolabs_zed zed.launch.py
[INFO] [launch]: process[zed_wrapper_node-1]: started with pid [12172]
/home/user/dev/zed_ws/install/stereolabs_zed/lib/stereolabs_zed/zed_wrapper_node: error while loading shared libraries: libnppc.so.10.0: cannot open shared object file: No such file or directory
[ERROR] [launch]: process[zed_wrapper_node-1] process has died [pid 12172, exit code 127, cmd '/home/user/dev/zed_ws/install/stereolabs_zed/lib/stereolabs_zed/zed_wrapper_node __node:=zed_node __ns:=/zed __params:=/home/user/dev/zed_ws/install/stereolabs_zed/share/stereolabs_zed/config/common.yaml __params:=/home/user/dev/zed_ws/install/stereolabs_zed/share/stereolabs_zed/config/zed.yaml'].
^C[WARNING] [launch.LaunchService]: user interrupted with ctrl-c (SIGINT)
[ERROR] [asyncio]: Future exception was never retrieved
future: <Future finished exception=RuntimeError("Failed to check service availability: rcl node's rmw handle is invalid, at /tmp/binarydeb/ros-crystal-rcl-0.6.6/src/rcl/node.c:535",)>
Traceback (most recent call last):
File "/usr/lib/python3.6/concurrent/futures/thread.py", line 56, in run
result = self.fn(*self.args, **self.kwargs)
File "/opt/ros/crystal/lib/python3.6/site-packages/launch_ros/actions/lifecycle_node.py", line 79, in _call_change_state
while not self.__rclpy_change_state_client.wait_for_service(timeout_sec=1.0):
File "/opt/ros/crystal/lib/python3.6/site-packages/rclpy/client.py", line 105, in wait_for_service
while self.context.ok() and not self.service_is_ready() and timeout_sec > 0.0:
File "/opt/ros/crystal/lib/python3.6/site-packages/rclpy/client.py", line 97, in service_is_ready
return _rclpy.rclpy_service_server_is_available(self.node_handle, self.client_handle)
RuntimeError: Failed to check service availability: rcl node's rmw handle is invalid, at /tmp/binarydeb/ros-crystal-rcl-0.6.6/src/rcl/node.c:535
hello, Can we reconfigure only the following 6 parameters directly during the execution of the node?
i want to reconfigure >video.qos_reliability and >video.qos_history directly during the execution of the node.
I would appreciate it if you could get back to me.
`
general.mat_resize_factor: Sets the scale factor of the output images and depth map. Note that the camera will acquire data at the dimension set by the resolution parameter; images are resized before being sent to the user
video.auto_exposure: Enables/disables automatic gain and exposure
video.exposure: Sets camera exposure only if auto_exposure is false
video.gain: Set camera gain only if auto_exposure is false
depth.confidence: Sets a threshold that filters the values of the depth or the point cloud. With a confidence threshold set to 100, all depth values will be written in the depth and the point cloud. This is set to 80 by default, which removes the least accurate values.
depth.max_depth: Sets the maximum depth range`
Describe the bug
A clear and concise description of what the bug is.
Device information:
OS: [e.g. Ubuntu]
OS version: 18.04
CPU: [e.g. i7, Jeston Nano, Intel desktop
GPU Nvidia: jetson, GTX1660
ZED SDK Version: 3.5
ROS Wrapper version: zed-ros2-wrapper foxy-dev
To Reproduce
Steps to reproduce the behavior:
Expected behavior
This error only shows up with the zedm. The ZED1 and ZED2i work fine on both machines.
Screenshots

Additional context
Fresh install on both machines. Running Ubuntu 20.04 and ros2 foxy on the Desktop and Ubuntu 18.04 and ros2 foxy in a stereolabs container with ros2 installed as well on the nano. I ran the .yaml file through a asii dump looking for weird characters none were found. Strange problem it should work the other two cameras are fine.

Hello,
I get an std error(please see the attached image) for zed_component while trying to build the package in ros eloquent.Could you please support?
Also i don't see any node or launch files to view camera output in rviz. When is it expected to release here / any release planned?
Thanks in advance !
Regards,
Hari.s
If the ZED camera is plugged into the Jetson when I power on, I can see the system loading but around when the lock screen would show up the system crashes.
Similarly, if I start the Jetson without the ZED plugged in, I can use the Jetson normally until I plug in the ZED camera, in which the Jetson hard crashes like I pulled the power plug.
Any ideas how I would debug this sort of thing? Are there any special steps required for Jetson operation? Maybe I should reflash the Jetson SD card and try again.
Describe the bug
The zed_wrapper node doesn't restart the SVO file from the beginning after reaching the end of the file when setting the parameter general.svo_loop to True. Instead, the node logs the warning Camera error: END OF SVO FILE REACHED and stops.
Device information:
To Reproduce
Steps to reproduce the behavior:
/**:
general:
debug_mode: true
sdk_verbose: true
svo_file: path/to/svo_file
svo_loop: true
svo_realtime: false
camera_model: zed2
camera_name: zed2
camera_flip: true
resolution: 2
self_calib: false
grab_frame_rate: 30
pub_frame_rate: 15.0
video:
img_downsample_factor: 0.5
depth:
quality: 1
min_depth: 1.0
max_depth: 10.0
depth_downsample_factor: 0.5
point_cloud_freq: 15.0
pos_tracking:
publish_tf: false
publish_map_tf: false
base_frame: base_linkros2 launch zed_wrapper zed2.launch.py[INFO] [robot_state_publisher-1]: process started with pid [23886]
[INFO] [zed_wrapper-2]: process started with pid [23887]
[robot_state_publisher-1] Initialize urdf model from file: /workspaces/eloquent_ws/install/zed_wrapper/share/zed_wrapper/urdf/zed2.urdf
[robot_state_publisher-1] Parsing robot urdf xml string.
[robot_state_publisher-1] Link zed2_camera_center had 2 children
[robot_state_publisher-1] Link zed2_left_camera_frame had 1 children
[robot_state_publisher-1] Link zed2_left_camera_optical_frame had 0 children
[robot_state_publisher-1] Link zed2_right_camera_frame had 1 children
[robot_state_publisher-1] Link zed2_right_camera_optical_frame had 0 children
[robot_state_publisher-1] got segment base_link
[robot_state_publisher-1] got segment zed2_camera_center
[robot_state_publisher-1] got segment zed2_left_camera_frame
[robot_state_publisher-1] got segment zed2_left_camera_optical_frame
[robot_state_publisher-1] got segment zed2_right_camera_frame
[robot_state_publisher-1] got segment zed2_right_camera_optical_frame
[robot_state_publisher-1] Adding fixed segment from base_link to zed2_camera_center
[robot_state_publisher-1] Adding fixed segment from zed2_camera_center to zed2_left_camera_frame
[robot_state_publisher-1] Adding fixed segment from zed2_left_camera_frame to zed2_left_camera_optical_frame
[robot_state_publisher-1] Adding fixed segment from zed2_camera_center to zed2_right_camera_frame
[robot_state_publisher-1] Adding fixed segment from zed2_right_camera_frame to zed2_right_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: ********************************
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: ZED Camera Component
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: ********************************
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * namespace: /zed26226608
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * node name: zed_node
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: ********************************
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** Debug Mode enabled ***
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: [ROS2] Using RMW_IMPLEMENTATION = rmw_fastrtps_cpp
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** GENERAL parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera model: zed2 - ZED 2
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * SDK Verbose: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * SVO: /workspaces/argos-ros2/tmp/ds20180128_sn26226608_ts164649.svo
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * SVO Loop: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * SVO Realtime: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera name: zed2
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera ID: 0
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera SN: 0
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera timeout [sec]: 5
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera reconnection temptatives: 5
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera framerate: 30
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * GPU ID: -1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera resolution: 2 - HD720
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera self calibration: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera flip: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Publish framerate [Hz]: 15
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** VIDEO parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Use old extrinsic parameters: 0
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Image downsample factor: 0.5
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Brightness: 4
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Contrast: 4
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Hue: 0
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Saturation: 4
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Sharpness: 4
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Gamma: 8
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Auto Exposure/Gain: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Exposure: 80
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Gain: 80
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Auto White Balance: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] White Balance Temperature: 42
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Video QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Video QoS History depth: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Video QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Video QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** DEPTH parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth downsample factor: 0.5
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth quality: 1 - PERFORMANCE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Min depth [m]: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Max depth [m]: 10
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth Sensing Mode: 0 - STANDARD
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth Stabilization: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * OpenNI mode (16bit point cloud): FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Point cloud rate [Hz]: 15
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Depth Confidence: 50
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Depth Texture Confidence: 100
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth QoS History depth: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** POSITIONAL TRACKING parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Base frame id: base_link
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Map frame id: map
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Odometry frame id: odom
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Broadcast Odometry TF: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * [DYN] Path publishing rate: 2
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Path history lenght: -1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Initial pose: [0,0,0,0,0,0,]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Area Memory: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Area Memory DB:
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * IMU Fusion [not for ZED]: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Floor Alignment: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Init Odometry with first valid pose data: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * 2D mode: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Pose/Odometry QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Pose/Odometry QoS History depth: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Pose/Odometry QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Pose/Odometry QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** SENSORS STACK parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors Camera Sync: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors publishing rate: 400 Hz
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS History depth: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** Spatial Mapping parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Spatial Mapping Enabled: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Spatial Mapping resolution [m]: 0.05
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * 3D Max Mapping range [m]: 10
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Map publishing rate [Hz]: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS History depth: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** OBJECT DETECTION parameters ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Object Detection enabled: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * OD min. confidence: 40
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Object Detection model: 0 - MULTI CLASS BOX
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * MultiClassBox people: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * MultiClassBox vehicles: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * MultiClassBox bags: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * MultiClassBox animals: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * MultiClassBox electronics: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * MultiClassBox fruits and vegetables: TRUE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Skeleton fitting: FALSE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Obj. Det. QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Obj. Det. QoS History depth: 1
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Obj. Det. QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Obj. Det. QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** SERVICES ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/reset_odometry'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/reset_pos_tracking'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/set_pose'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/enable_obj_det'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/enable_mapping'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/start_svo_rec'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/stop_svo_rec'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * '/zed26226608/zed_node/toggle_svo_pause'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: ***** STARTING CAMERA *****
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: SDK Version: 3.3.1 - Build 21463_94204863
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** SVO OPENING ***
[zed_wrapper-2] [ZED][Init] Depth mode: PERFORMANCE
[zed_wrapper-2] [ZED][Init] Self-calibration disabled
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Opening successfull
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: ZED SDK running on GPU #0
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera Model -> ZED 2
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Serial Number -> 26226608
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Input type -> SVO input type
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * SVO resolution -> 1280x720
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * SVO framerate -> 30
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Camera-IMU Transform:
[zed_wrapper-2] 55746B4FEB10
[zed_wrapper-2] 1.000000 0.000000 0.000000 0.000000
[zed_wrapper-2] 0.000000 1.000000 0.000000 0.000000
[zed_wrapper-2] 0.000000 0.000000 1.000000 0.000000
[zed_wrapper-2] 0.000000 0.000000 0.000000 1.000000
[zed_wrapper-2]
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Camera Frame size : 1280x720
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Image Mat size : 640x360
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Depth Mat size : 640x360
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** TF FRAMES ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Map -> map
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Odometry -> odom
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Base -> base_link
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Camera -> zed2_camera_center
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Left -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Left Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * RGB -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * RGB Optical -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Right -> zed2_right_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Right Optical -> zed2_right_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Depth Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Point Cloud -> zed2_left_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Disparity -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Disparity Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Confidence -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Confidence Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * IMU -> zed2_imu_link
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Barometer -> zed2_camera_center
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Magnetometer -> zed2_imu_link
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Left Temperature -> zed2_left_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Right Temperature -> zed2_right_camera_frame
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** PUBLISHED TOPICS ***
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/rgb/image_rect_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/rgb/image_rect_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/rgb/image_rect_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/rgb/image_rect_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/rgb/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/rgb_raw/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/left/image_rect_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left/image_rect_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/left/image_rect_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left/image_rect_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/left_raw/image_raw_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left_raw/image_raw_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/left_raw/image_raw_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left_raw/image_raw_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left_raw/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/right/image_rect_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/right/image_rect_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/right/image_rect_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/right/image_rect_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/right/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/right_raw/image_raw_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/right_raw/image_raw_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/right_raw/image_raw_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/right_raw/image_raw_gray
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/right_raw/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/depth/depth_registered
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/depth/depth_registered
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/depth/camera_info
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/stereo/image_rect_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/stereo/image_rect_color
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: getTopicToAdvertise: /zed26226608/zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/confidence/confidence_map
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/disparity/disparity_image
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/point_cloud/cloud_registered
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/pose
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/pose_with_covariance
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/odom
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/path_map
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/path_odom
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/imu/data
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/imu/data_raw
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/temperature/imu
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/imu/mag
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/atm_press
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/temperature/left
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/temperature/right
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Advertised on topic: /zed26226608/zed_node/left_cam_imu_transform [LATCHED]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Camera-IMU Translation:
[zed_wrapper-2] 0 0 0
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Camera-IMU Rotation:
[zed_wrapper-2] 7FFC37CC7560
[zed_wrapper-2] 1.000000 0.000000 0.000000
[zed_wrapper-2] 0.000000 1.000000 0.000000
[zed_wrapper-2] 0.000000 0.000000 1.000000
[zed_wrapper-2]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Published static TF: 'zed2_imu_link' -> 'zed2_left_camera_frame'
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Point Cloud thread started
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Grab thread started
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: *** Starting Positional Tracking ***
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Waiting for valid static transformations...
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_left_camera_frame' to 'base_link'
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_left_camera_frame' to 'zed2_camera_center'
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_camera_center' to 'base_link'
[zed_wrapper-2] Warning: Invalid frame ID "base_link" passed to canTransform argument source_frame - frame does not exist
[zed_wrapper-2] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.5/src/buffer_core.cpp
[zed_wrapper-2] Warning: Invalid frame ID "zed2_camera_center" passed to canTransform argument source_frame - frame does not exist
[zed_wrapper-2] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.5/src/buffer_core.cpp
[zed_wrapper-2] Warning: Invalid frame ID "zed2_camera_center" passed to canTransform argument target_frame - frame does not exist
[zed_wrapper-2] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.5/src/buffer_core.cpp
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Video Depth callback called
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_left_camera_frame' to 'base_link'
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_left_camera_frame' to 'zed2_camera_center'
[zed_wrapper-2] Warning: Invalid frame ID "base_link" passed to canTransform argument source_frame - frame does not exist
[zed_wrapper-2] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.5/src/buffer_core.cpp
[zed_wrapper-2] Warning: Invalid frame ID "zed2_camera_center" passed to canTransform argument source_frame - frame does not exist
[zed_wrapper-2] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.5/src/buffer_core.cpp
[zed_wrapper-2] Warning: Invalid frame ID "zed2_camera_center" passed to canTransform argument target_frame - frame does not exist
[zed_wrapper-2] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.5/src/buffer_core.cpp
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_camera_center' to 'base_link'
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_left_camera_frame' to 'base_link'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Static transform Sensor to Base [zed2_left_camera_frame -> base_link]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_left_camera_frame' to 'zed2_camera_center'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Static transform Sensor to Camera Center [zed2_left_camera_frame -> zed2_camera_center]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Getting static TF from 'zed2_camera_center' to 'base_link'
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Static transform Camera Center to Base [zed2_camera_center -> base_link]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Translation: {0.000,0.000,0.000}
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Time required to get valid static transforms: 0.201 sec
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: Initial ZED left camera pose (ZED pos. tracking):
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * T: [0,0.06,0]
[zed_wrapper-2] [INFO] [zed26226608.zed_node]: * Q: [0,0,0,1]
[zed_wrapper-2] [WARN] [zed26226608.zed_node]: SVO reached the end and has been restarted.
[zed_wrapper-2] [ERROR] [zed26226608.zed_node]: Camera error: END OF SVO FILE REACHED
[zed_wrapper-2] [DEBUG] [zed26226608.zed_node]: Grab thread finishedExpected behavior
After reaching the end of the SVO file, the node should restart the SVO file.
Additional context
I think there's a logic error in
zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp
Lines 2754 to 2771 in 678bb3b
When mGrabStatus is sl::ERROR_CODE::END_OF_SVOFILE_REACHED the if-statement is entered and the SVO position is set to zero. But mGrabStatus doesn't change and hence, the last if-statement in the code snippet is entered.
I can solve the issue by simply adding a continue; to the second nested if-statement. But I'm not sure if it's okay to skip the rest of the code. @Myzhar, happy to get your opinion on my solution.
I didnt change anything from the repo since i started using it. I just discovered an issue recently.
ros2 launch zed_display_rviz2 display_zed2.launch.py
no errors
[INFO] [launch]: All log files can be found below /home/tres/.ros/log/2021-11-15-12-19-05-535142-halodi-Precision-5550-36572
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [36575]
[INFO] [zed_wrapper-2]: process started with pid [36577]
[INFO] [rviz2-3]: process started with pid [36579]
[robot_state_publisher-1] Parsing robot urdf xml string.
[robot_state_publisher-1] Link zed2_camera_center had 4 children
[robot_state_publisher-1] Link zed2_baro_link had 0 children
[robot_state_publisher-1] Link zed2_left_camera_frame had 2 children
[robot_state_publisher-1] Link zed2_left_camera_optical_frame had 0 children
[robot_state_publisher-1] Link zed2_temp_left_link had 0 children
[robot_state_publisher-1] Link zed2_mag_link had 0 children
[robot_state_publisher-1] Link zed2_right_camera_frame had 2 children
[robot_state_publisher-1] Link zed2_right_camera_optical_frame had 0 children
[robot_state_publisher-1] Link zed2_temp_right_link had 0 children
[robot_state_publisher-1] 1636996745.695192530 [zed2.zed_state_publisher] [INFO] got segment base_link
[robot_state_publisher-1] 1636996745.695252072 [zed2.zed_state_publisher] [INFO] got segment zed2_baro_link
[robot_state_publisher-1] 1636996745.695260228 [zed2.zed_state_publisher] [INFO] got segment zed2_camera_center
[robot_state_publisher-1] 1636996745.695264848 [zed2.zed_state_publisher] [INFO] got segment zed2_left_camera_frame
[robot_state_publisher-1] 1636996745.695269142 [zed2.zed_state_publisher] [INFO] got segment zed2_left_camera_optical_frame
[robot_state_publisher-1] 1636996745.695273360 [zed2.zed_state_publisher] [INFO] got segment zed2_mag_link
[robot_state_publisher-1] 1636996745.695277372 [zed2.zed_state_publisher] [INFO] got segment zed2_right_camera_frame
[robot_state_publisher-1] 1636996745.695281292 [zed2.zed_state_publisher] [INFO] got segment zed2_right_camera_optical_frame
[robot_state_publisher-1] 1636996745.695285200 [zed2.zed_state_publisher] [INFO] got segment zed2_temp_left_link
[robot_state_publisher-1] 1636996745.695289091 [zed2.zed_state_publisher] [INFO] got segment zed2_temp_right_link
[zed_wrapper-2] 1636996745.701086770 [zed2.zed_node] [INFO] ********************************
[zed_wrapper-2] 1636996745.701151587 [zed2.zed_node] [INFO] ZED Camera Component
[zed_wrapper-2] 1636996745.701160037 [zed2.zed_node] [INFO] ********************************
[zed_wrapper-2] 1636996745.701165453 [zed2.zed_node] [INFO] * namespace: /zed2
[zed_wrapper-2] 1636996745.701170642 [zed2.zed_node] [INFO] * node name: zed_node
[zed_wrapper-2] 1636996745.701174834 [zed2.zed_node] [INFO] ********************************
[zed_wrapper-2] 1636996745.701207525 [zed2.zed_node] [INFO] *** DEBUG parameters ***
[zed_wrapper-2] 1636996745.701218807 [zed2.zed_node] [INFO] *** GENERAL parameters ***
[zed_wrapper-2] 1636996745.701242717 [zed2.zed_node] [INFO] * Camera model: zed2 - ZED 2
[zed_wrapper-2] 1636996745.701259867 [zed2.zed_node] [INFO] * SDK Verbose: 1
[zed_wrapper-2] 1636996745.701274045 [zed2.zed_node] [INFO] * SVO:
[zed_wrapper-2] 1636996745.701286253 [zed2.zed_node] [INFO] * SVO Loop: TRUE
[zed_wrapper-2] 1636996745.701301484 [zed2.zed_node] [INFO] * SVO Realtime: FALSE
[zed_wrapper-2] 1636996745.701315233 [zed2.zed_node] [INFO] * Camera name: zed2
[zed_wrapper-2] 1636996745.701331333 [zed2.zed_node] [INFO] * Camera ID: 0
[zed_wrapper-2] 1636996745.701344472 [zed2.zed_node] [INFO] * Camera SN: 0
[zed_wrapper-2] 1636996745.701358189 [zed2.zed_node] [INFO] * Camera timeout [sec]: 5
[zed_wrapper-2] 1636996745.701371338 [zed2.zed_node] [INFO] * Camera reconnection temptatives: 5
[zed_wrapper-2] 1636996745.701386504 [zed2.zed_node] [INFO] * Camera framerate: 30
[zed_wrapper-2] 1636996745.701400022 [zed2.zed_node] [INFO] * GPU ID: -1
[zed_wrapper-2] 1636996745.701414293 [zed2.zed_node] [INFO] * Camera resolution: 2 - HD720
[zed_wrapper-2] 1636996745.701426834 [zed2.zed_node] [INFO] * Camera self calibration: TRUE
[zed_wrapper-2] 1636996745.701438419 [zed2.zed_node] [INFO] * Camera flip: FALSE
[zed_wrapper-2] 1636996745.701453428 [zed2.zed_node] [INFO] * [DYN] Publish framerate [Hz]: 15
[zed_wrapper-2] 1636996745.701463702 [zed2.zed_node] [INFO] *** VIDEO parameters ***
[zed_wrapper-2] 1636996745.701476542 [zed2.zed_node] [INFO] * Use old extrinsic parameters: 0
[zed_wrapper-2] 1636996745.701489277 [zed2.zed_node] [INFO] * [DYN] Image downsample factor: 0.5
[zed_wrapper-2] 1636996745.701504181 [zed2.zed_node] [INFO] * [DYN] Brightness: 4
[zed_wrapper-2] 1636996745.701517532 [zed2.zed_node] [INFO] * [DYN] Contrast: 4
[zed_wrapper-2] 1636996745.701531857 [zed2.zed_node] [INFO] * [DYN] Hue: 0
[zed_wrapper-2] 1636996745.701545172 [zed2.zed_node] [INFO] * [DYN] Saturation: 4
[zed_wrapper-2] 1636996745.701558028 [zed2.zed_node] [INFO] * [DYN] Sharpness: 4
[zed_wrapper-2] 1636996745.701570378 [zed2.zed_node] [INFO] * [DYN] Gamma: 8
[zed_wrapper-2] 1636996745.701582759 [zed2.zed_node] [INFO] * [DYN] Auto Exposure/Gain: TRUE
[zed_wrapper-2] 1636996745.701595314 [zed2.zed_node] [INFO] * [DYN] Exposure: 80
[zed_wrapper-2] 1636996745.701607820 [zed2.zed_node] [INFO] * [DYN] Gain: 80
[zed_wrapper-2] 1636996745.701621470 [zed2.zed_node] [INFO] * [DYN] Auto White Balance: TRUE
[zed_wrapper-2] 1636996745.701634633 [zed2.zed_node] [INFO] * [DYN] White Balance Temperature: 42
[zed_wrapper-2] 1636996745.701650101 [zed2.zed_node] [INFO] * Video QoS History: KEEP_LAST
[zed_wrapper-2] 1636996745.701662687 [zed2.zed_node] [INFO] * Video QoS History depth: 1
[zed_wrapper-2] 1636996692.793409811 [zed2.zed_node] [INFO] * Video QoS History depth: 1
[zed_wrapper-2] 1636996692.793432730 [zed2.zed_node] [INFO] * Video QoS Reliability: RELIABLE
[zed_wrapper-2] 1636996692.793454303 [zed2.zed_node] [INFO] * Video QoS Durability: VOLATILE
[zed_wrapper-2] 1636996692.793461381 [zed2.zed_node] [INFO] *** DEPTH parameters ***
[zed_wrapper-2] 1636996692.793478991 [zed2.zed_node] [INFO] * Depth quality: 1 - PERFORMANCE
[zed_wrapper-2] 1636996692.793496855 [zed2.zed_node] [INFO] * Depth downsample factor: 0.5
[zed_wrapper-2] 1636996692.793526703 [zed2.zed_node] [INFO] * Min depth [m]: 0.2
[zed_wrapper-2] 1636996692.793543201 [zed2.zed_node] [INFO] * Max depth [m]: 20
[zed_wrapper-2] 1636996692.793567516 [zed2.zed_node] [INFO] * Depth Sensing Mode: 0 - STANDARD
[zed_wrapper-2] 1636996692.793588315 [zed2.zed_node] [INFO] * Depth Stabilization: TRUE
[zed_wrapper-2] 1636996692.793609548 [zed2.zed_node] [INFO] * OpenNI mode (16bit point cloud): FALSE
[zed_wrapper-2] 1636996692.793635852 [zed2.zed_node] [INFO] * [DYN] Point cloud rate [Hz]: 10
[zed_wrapper-2] 1636996692.793656820 [zed2.zed_node] [INFO] * [DYN] Depth Confidence: 50
[zed_wrapper-2] 1636996692.793680077 [zed2.zed_node] [INFO] * [DYN] Depth Texture Confidence: 100
[zed_wrapper-2] 1636996692.793701807 [zed2.zed_node] [INFO] * Depth QoS History: KEEP_LAST
[zed_wrapper-2] 1636996692.793725251 [zed2.zed_node] [INFO] * Depth QoS History depth: 1
[zed_wrapper-2] 1636996692.793747769 [zed2.zed_node] [INFO] * Depth QoS Reliability: RELIABLE
[zed_wrapper-2] 1636996692.793772587 [zed2.zed_node] [INFO] * Depth QoS Durability: VOLATILE
[zed_wrapper-2] 1636996692.793779909 [zed2.zed_node] [INFO] *** POSITIONAL TRACKING parameters ***
[zed_wrapper-2] 1636996692.793812937 [zed2.zed_node] [INFO] * Positional tracking enabled: TRUE
[zed_wrapper-2] 1636996692.793837734 [zed2.zed_node] [INFO] * Base frame id: base_link
[zed_wrapper-2] 1636996692.793861083 [zed2.zed_node] [INFO] * Map frame id: map
[zed_wrapper-2] 1636996692.793884748 [zed2.zed_node] [INFO] * Odometry frame id: odom
[zed_wrapper-2] 1636996692.793908534 [zed2.zed_node] [INFO] * Broadcast Odometry TF: TRUE
[zed_wrapper-2] 1636996692.793932951 [zed2.zed_node] [INFO] * Broadcast Pose TF: TRUE
[zed_wrapper-2] 1636996692.793957029 [zed2.zed_node] [INFO] * Broadcast Static IMU TF [not for ZED]: TRUE
[zed_wrapper-2] 1636996692.793982740 [zed2.zed_node] [INFO] * [DYN] Path publishing rate: 2
[zed_wrapper-2] 1636996692.794006587 [zed2.zed_node] [INFO] * Path history lenght: -1
[zed_wrapper-2] 1636996692.794031323 [zed2.zed_node] [INFO] * Initial pose: [0,0,0,0,0,0,]
[zed_wrapper-2] 1636996692.794052945 [zed2.zed_node] [INFO] * Area Memory: TRUE
[zed_wrapper-2] 1636996692.794077076 [zed2.zed_node] [INFO] * Area Memory DB:
[zed_wrapper-2] 1636996692.794102084 [zed2.zed_node] [INFO] * IMU Fusion [not for ZED]: TRUE
[zed_wrapper-2] 1636996692.794126637 [zed2.zed_node] [INFO] * Floor Alignment: FALSE
[zed_wrapper-2] 1636996692.794157445 [zed2.zed_node] [INFO] * Init Odometry with first valid pose data: TRUE
[zed_wrapper-2] 1636996692.794181735 [zed2.zed_node] [INFO] * 2D mode: FALSE
[zed_wrapper-2] 1636996692.794206089 [zed2.zed_node] [INFO] * Pose/Odometry QoS History: KEEP_LAST
[zed_wrapper-2] 1636996692.794229536 [zed2.zed_node] [INFO] * Pose/Odometry QoS History depth: 1
[zed_wrapper-2] 1636996692.794253928 [zed2.zed_node] [INFO] * Pose/Odometry QoS Reliability: RELIABLE
[zed_wrapper-2] 1636996692.794284144 [zed2.zed_node] [INFO] * Pose/Odometry QoS Durability: VOLATILE
[zed_wrapper-2] 1636996692.794294990 [zed2.zed_node] [INFO] *** SENSORS STACK parameters ***
[zed_wrapper-2] 1636996692.794308956 [zed2.zed_node] [INFO] * Sensors Camera Sync: FALSE
[zed_wrapper-2] 1636996692.794335798 [zed2.zed_node] [INFO] * Sensors publishing rate: 200 Hz
[zed_wrapper-2] 1636996692.794358716 [zed2.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] 1636996692.794383599 [zed2.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-2] 1636996692.794409894 [zed2.zed_node] [INFO] * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] 1636996692.794434689 [zed2.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] 1636996692.794442074 [zed2.zed_node] [INFO] *** Spatial Mapping parameters ***
[zed_wrapper-2] 1636996692.794462434 [zed2.zed_node] [INFO] * Spatial Mapping Enabled: FALSE
[zed_wrapper-2] 1636996692.794489777 [zed2.zed_node] [INFO] * Spatial Mapping resolution [m]: 0.1
[zed_wrapper-2] 1636996692.794514857 [zed2.zed_node] [INFO] * 3D Max Mapping range [m]: 20
[zed_wrapper-2] 1636996692.794540714 [zed2.zed_node] [INFO] * Map publishing rate [Hz]: 0.5
[zed_wrapper-2] 1636996692.794564934 [zed2.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] 1636996692.794591820 [zed2.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-2] 1636996692.794619419 [zed2.zed_node] [INFO] * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] 1636996692.794645443 [zed2.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] 1636996692.794652773 [zed2.zed_node] [INFO] *** OBJECT DETECTION parameters ***
[zed_wrapper-2] 1636996692.794673841 [zed2.zed_node] [INFO] * Object Detection enabled: FALSE
[zed_wrapper-2] 1636996692.794701794 [zed2.zed_node] [INFO] * OD min. confidence: 50
[zed_wrapper-2] 1636996692.794728874 [zed2.zed_node] [INFO] * Object Detection model: 0 - MULTI CLASS BOX FAST
[zed_wrapper-2] 1636996692.794753466 [zed2.zed_node] [INFO] * MultiClassBox people: TRUE
[zed_wrapper-2] 1636996692.794780011 [zed2.zed_node] [INFO] * MultiClassBox vehicles: TRUE
[zed_wrapper-2] 1636996692.794807323 [zed2.zed_node] [INFO] * MultiClassBox bags: TRUE
[zed_wrapper-2] 1636996692.794846741 [zed2.zed_node] [INFO] * MultiClassBox animals: TRUE
[zed_wrapper-2] 1636996692.794879038 [zed2.zed_node] [INFO] * MultiClassBox electronics: TRUE
[zed_wrapper-2] 1636996692.794907834 [zed2.zed_node] [INFO] * MultiClassBox fruits and vegetables: TRUE
[zed_wrapper-2] 1636996692.794936043 [zed2.zed_node] [INFO] * Skeleton fitting: FALSE
[zed_wrapper-2] 1636996692.794963100 [zed2.zed_node] [INFO] * Obj. Det. QoS History: KEEP_LAST
[zed_wrapper-2] 1636996692.794991226 [zed2.zed_node] [INFO] * Obj. Det. QoS History depth: 1
[zed_wrapper-2] 1636996692.795019913 [zed2.zed_node] [INFO] * Obj. Det. QoS Reliability: RELIABLE
[zed_wrapper-2] 1636996692.795048612 [zed2.zed_node] [INFO] * Obj. Det. QoS Durability: VOLATILE
[zed_wrapper-2] 1636996692.795092945 [zed2.zed_node] [INFO] *** SERVICES ***
[zed_wrapper-2] 1636996692.795372864 [zed2.zed_node] [INFO] * '/zed2/zed_node/reset_odometry'
[zed_wrapper-2] 1636996692.795539564 [zed2.zed_node] [INFO] * '/zed2/zed_node/reset_pos_tracking'
[zed_wrapper-2] 1636996692.795796881 [zed2.zed_node] [INFO] * '/zed2/zed_node/set_pose'
[zed_wrapper-2] 1636996692.795982901 [zed2.zed_node] [INFO] * '/zed2/zed_node/enable_obj_det'
[zed_wrapper-2] 1636996692.796128220 [zed2.zed_node] [INFO] * '/zed2/zed_node/enable_mapping'
[zed_wrapper-2] 1636996692.796310430 [zed2.zed_node] [INFO] * '/zed2/zed_node/start_svo_rec'
[zed_wrapper-2] 1636996692.796457547 [zed2.zed_node] [INFO] * '/zed2/zed_node/stop_svo_rec'
[zed_wrapper-2] 1636996692.796599792 [zed2.zed_node] [INFO] * '/zed2/zed_node/toggle_svo_pause'
[zed_wrapper-2] 1636996692.796613802 [zed2.zed_node] [INFO] ***** STARTING CAMERA *****
[zed_wrapper-2] 1636996692.796619107 [zed2.zed_node] [INFO] SDK Version: 3.5.1 - Build 26368_03ef6906
[zed_wrapper-2] 1636996692.797929187 [zed2.zed_node] [INFO] *** CAMERA OPENING ***
[rviz2-3] 1636996693.267196247 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] 1636996693.267283900 [rviz2] [INFO] OpenGl version: 4.6 (GLSL 4.6)
[rviz2-3] 1636996693.285741263 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[zed_wrapper-2] 1636996693.399577264 [zed2.zed_node] [WARN] Error opening camera: CAMERA NOT DETECTED
[zed_wrapper-2] 1636996693.399613872 [zed2.zed_node] [INFO] Please verify the USB3 connection
[rviz2-3] 1636996693.430213915 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] 1636996693.447268157 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] 1636996693.466859953 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] 1636996693.482294576 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] Parsing robot urdf xml string.
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.11/src/buffer_core.cpp
ZED2
OS:LinuxNo response
Hi, I am enable to build the stereolalbs_zed.
I am running ROS2 Crystal on ubuntu 18.04 LTS using Jetson AGX Xavier.
The Jetpack version is 4.2.
Here is the error message.
Please let me know if there is anything I can do to correct this error:
jin@jin-desktop:~/ros2_ws$ colcon build --symlink-install --packages-select stereolabs_zed --cmake-args=-DCMAKE_BUILD_TYPE=Release
Starting >>> stereolabs_zed
--- stderr: stereolabs_zed
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
Timestamp
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
Timestamp
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘int sl_tools::checkCameraReady(unsigned int)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:39:54: error: ‘CAMERA_STATE_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
it.camera_state == sl::CAMERA_STATE::CAMERA_STATE_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘sl::DeviceProperties sl_tools::getZEDFromSN(unsigned int)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:52:54: error: ‘CAMERA_STATE_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
it.camera_state == sl::CAMERA_STATE::CAMERA_STATE_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
Timestamp
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘int sl_tools::checkCameraReady(unsigned int)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:39:54: error: ‘CAMERA_STATE_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
it.camera_state == sl::CAMERA_STATE::CAMERA_STATE_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘sl::DeviceProperties sl_tools::getZEDFromSN(unsigned int)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:52:54: error: ‘CAMERA_STATE_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
it.camera_state == sl::CAMERA_STATE::CAMERA_STATE_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: At global scope:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: error: redefinition of ‘rclcpp::Time sl_tools::slTime2Ros’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:18: note: ‘rclcpp::Time sl_tools::slTime2Ros’ previously declared here
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
Timestamp
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘int sl_tools::checkCameraReady(unsigned int)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:39:54: error: ‘CAMERA_STATE_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
it.camera_state == sl::CAMERA_STATE::CAMERA_STATE_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘sl::DeviceProperties sl_tools::getZEDFromSN(unsigned int)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:52:54: error: ‘CAMERA_STATE_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
it.camera_state == sl::CAMERA_STATE::CAMERA_STATE_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: At global scope:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: error: redefinition of ‘rclcpp::Time sl_tools::slTime2Ros’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:18: note: ‘rclcpp::Time sl_tools::slTime2Ros’ previously declared here
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
Timestamp
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘std::shared_ptr<sensor_msgs::msg::Image_<std::allocator > > sl_tools::imageToROSmsg(sl::Mat, std::cxx11::string, rclcpp::Time)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:193:18: error: ‘MAT_TYPE_32F_C1’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C1: /< float 1 channel.*/
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:193:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C1: /< float 1 channel./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:198:18: error: ‘MAT_TYPE_32F_C2’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C2: /**< float 2 channels./
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:198:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C2: /< float 2 channels.*/
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:203:18: error: ‘MAT_TYPE_32F_C3’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C3: /< float 3 channels./
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:203:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C3: /**< float 3 channels./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:208:18: error: ‘MAT_TYPE_32F_C4’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C4: /< float 4 channels.*/
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:208:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C4: /< float 4 channels./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:213:18: error: ‘MAT_TYPE_8U_C1’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C1: /**< unsigned char 1 channel./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:213:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C1: /< unsigned char 1 channel.*/
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:218:18: error: ‘MAT_TYPE_8U_C2’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C2: /< unsigned char 2 channels./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:218:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C2: /**< unsigned char 2 channels./
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: At global scope:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: error: redefinition of ‘rclcpp::Time sl_tools::slTime2Ros’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:18: note: ‘rclcpp::Time sl_tools::slTime2Ros’ previously declared here
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:223:18: error: ‘MAT_TYPE_8U_C3’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C3: /< unsigned char 3 channels.*/
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:223:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C3: /< unsigned char 3 channels./
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:167:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t) {
^~~~~~~~~
Timestamp
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:228:18: error: ‘MAT_TYPE_8U_C4’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C4: /**< unsigned char 4 channels./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:228:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C4: /**< unsigned char 4 channels.*/
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘std::shared_ptr<sensor_msgs::msg::Image<std::allocator > > sl_tools::imageToROSmsg(sl::Mat, std::cxx11::string, rclcpp::Time)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:193:18: error: ‘MAT_TYPE_32F_C1’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C1: /< float 1 channel.*/
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:193:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C1: /< float 1 channel./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:198:18: error: ‘MAT_TYPE_32F_C2’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C2: /**< float 2 channels./
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:198:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C2: /< float 2 channels.*/
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:203:18: error: ‘MAT_TYPE_32F_C3’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C3: /< float 3 channels./
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:203:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C3: /**< float 3 channels./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:208:18: error: ‘MAT_TYPE_32F_C4’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C4: /< float 4 channels.*/
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:208:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C4: /< float 4 channels./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:213:18: error: ‘MAT_TYPE_8U_C1’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C1: /**< unsigned char 1 channel./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:213:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C1: /< unsigned char 1 channel.*/
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:218:18: error: ‘MAT_TYPE_8U_C2’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C2: /< unsigned char 2 channels./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:218:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C2: /**< unsigned char 2 channels./
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:223:18: error: ‘MAT_TYPE_8U_C3’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C3: /< unsigned char 3 channels.*/
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:223:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C3: /< unsigned char 3 channels./
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:228:18: error: ‘MAT_TYPE_8U_C4’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C4: /**< unsigned char 4 channels./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:228:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C4: /**< unsigned char 4 channels.*/
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp: In function ‘std::shared_ptr<sensor_msgs::msg::Image<std::allocator > > sl_tools::imageToROSmsg(sl::Mat, std::cxx11::string, rclcpp::Time)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:193:18: error: ‘MAT_TYPE_32F_C1’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C1: /< float 1 channel.*/
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:193:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C1: /< float 1 channel./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:198:18: error: ‘MAT_TYPE_32F_C2’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C2: /**< float 2 channels./
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:198:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C2: /< float 2 channels.*/
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:203:18: error: ‘MAT_TYPE_32F_C3’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C3: /< float 3 channels./
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:203:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C3: /**< float 3 channels./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:208:18: error: ‘MAT_TYPE_32F_C4’ is not a member of ‘sl’
case sl::MAT_TYPE_32F_C4: /< float 4 channels.*/
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:208:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_32F_C4: /< float 4 channels./
^~~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:213:18: error: ‘MAT_TYPE_8U_C1’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C1: /**< unsigned char 1 channel./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:213:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C1: /< unsigned char 1 channel.*/
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:218:18: error: ‘MAT_TYPE_8U_C2’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C2: /< unsigned char 2 channels./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:218:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C2: /**< unsigned char 2 channels./
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:223:18: error: ‘MAT_TYPE_8U_C3’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C3: /< unsigned char 3 channels.*/
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:223:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C3: /< unsigned char 3 channels./
^~~~~~~~~~~~~~
MAT_TYPE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:228:18: error: ‘MAT_TYPE_8U_C4’ is not a member of ‘sl’
case sl::MAT_TYPE_8U_C4: /**< unsigned char 4 channels./
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/src/sl_tools.cpp:228:18: note: suggested alternative: ‘MAT_TYPE’
case sl::MAT_TYPE_8U_C4: /**< unsigned char 4 channels./
^~~~~~~~~~~~~~
MAT_TYPE
make[2]: *** [CMakeFiles/zed_tf_broadcaster.dir/src/tools/src/sl_tools.cpp.o] Error 1
make[2]: *** Waiting for unfinished jobs....
make[2]: *** [CMakeFiles/zed_it_broadcaster.dir/src/tools/src/sl_tools.cpp.o] Error 1
make[2]: *** Waiting for unfinished jobs....
make[2]: *** [CMakeFiles/zed_component.dir/src/tools/src/sl_tools.cpp.o] Error 1
make[2]: *** Waiting for unfinished jobs....
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:65:0,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: error: ‘timeStamp’ is not a member of ‘sl’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/tools/include/sl_tools.h:58:33: note: suggested alternative: ‘Timestamp’
rclcpp::Time slTime2Ros(sl::timeStamp t);
^~~~~~~~~
Timestamp
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:0:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:584:13: error: ‘TRACKING_STATE’ in namespace ‘sl’ does not name a type
sl::TRACKING_STATE mTrackingStatus;
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:606:13: error: ‘RecordingState’ in namespace ‘sl’ does not name a type
sl::RecordingState mRecState;
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘virtual rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn stereolabs::ZedCameraComponent::on_configure(const rclcpp_lifecycle::State&)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1786:24: error: ‘struct sl::InitParameters’ has no member named ‘svo_input_filename’
mZedParams.svo_input_filename = mSvoFilepath.c_str();
^~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1796:28: error: ‘struct sl::InitParameters’ has no member named ‘camera_linux_id’
mZedParams.camera_linux_id = mZedId;
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1800:44: error: ‘COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP_X_FWD’ is not a member of ‘sl’
mZedParams.coordinate_system = sl::COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP_X_FWD;
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1801:43: error: ‘UNIT_METER’ is not a member of ‘sl’
mZedParams.coordinate_units = sl::UNIT_METER;
^~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1821:24: error: ‘struct sl::InitParameters’ has no member named ‘camera_linux_id’
mZedParams.camera_linux_id = mZedId;
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1834:60: error: ‘CAMERA_STATE_NOT_AVAILABLE’ is not a member of ‘sl::CAMERA_STATE’
prop.camera_state == sl::CAMERA_STATE::CAMERA_STATE_NOT_AVAILABLE) {
^~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1840:32: error: ‘struct sl::InitParameters’ has no member named ‘camera_linux_id’
mZedParams.camera_linux_id = prop.id;
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1860:28: error: ‘SUCCESS’ is not a member of ‘sl’
if (err == sl::SUCCESS) {
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1873:28: error: ‘ERROR_CODE_CAMERA_DETECTION_ISSUE’ is not a member of ‘sl’
if (err == sl::ERROR_CODE_CAMERA_DETECTION_ISSUE && mZedUserCamModel == 1) {
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1901:37: error: ‘MODEL_ZED’ is not a member of ‘sl’
if (mZedRealCamModel == sl::MODEL_ZED) {
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1901:37: note: suggested alternative: ‘MODEL’
if (mZedRealCamModel == sl::MODEL_ZED) {
^~~~~~~~~
MODEL
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1907:44: error: ‘MODEL_ZED_M’ is not a member of ‘sl’
} else if (mZedRealCamModel == sl::MODEL_ZED_M) {
^~~~~~~~~~~
In file included from /opt/ros/crystal/include/rclcpp/client.hpp:39:0,
from /opt/ros/crystal/include/rclcpp/callback_group.hpp:23,
from /opt/ros/crystal/include/rclcpp/any_executable.hpp:20,
from /opt/ros/crystal/include/rclcpp/memory_strategy.hpp:24,
from /opt/ros/crystal/include/rclcpp/memory_strategies.hpp:18,
from /opt/ros/crystal/include/rclcpp/executor.hpp:32,
from /opt/ros/crystal/include/rclcpp/executors/multi_threaded_executor.hpp:24,
from /opt/ros/crystal/include/rclcpp/executors.hpp:21,
from /opt/ros/crystal/include/rclcpp/rclcpp.hpp:144,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:35,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1919:76: error: ‘struct sl::CameraInformation’ has no member named ‘firmware_version’; did you mean ‘camera_firmware_version’?
RCLCPP_INFO(get_logger(), "FW VERSION: %s", std::to_string(camInfo.firmware_version).c_str());
^
/opt/ros/crystal/include/rcutils/logging_macros.h:72:64: note: in definition of macro ‘RCUTILS_LOG_COND_NAMED’
rcutils_log(&__rcutils_logging_location, severity, name, VA_ARGS);
^~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:189:3: note: in expansion of macro ‘RCUTILS_LOG_INFO_NAMED’
RCUTILS_LOG_INFO_NAMED(
^~~~~~~~~~~~~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:192:7: note: in expansion of macro ‘RCLCPP_ALL_BUT_FIRST_ARGS’
RCLCPP_ALL_BUT_FIRST_ARGS(VA_ARGS,""))
^~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1919:9: note: in expansion of macro ‘RCLCPP_INFO’
RCLCPP_INFO(get_logger(), "FW VERSION: %s", std::to_string(camInfo.firmware_version).c_str());
^
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1928:63: error: ‘MODEL_ZED_M’ is not a member of ‘sl’
minDist = minDist == -1.0f ? (mZedRealCamModel == sl::MODEL_ZED_M ? 0.2f : 0.7f) : minDist;
^~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1936:26: error: ‘class sl::Camera’ has no member named ‘getResolution’; did you mean ‘getPosition’?
mCamWidth = mZed.getResolution().width;
^~~~~~~~~~~~~
getPosition
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:1937:27: error: ‘class sl::Camera’ has no member named ‘getResolution’; did you mean ‘getPosition’?
mCamHeight = mZed.getResolution().height;
^~~~~~~~~~~~~
getPosition
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘virtual rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn stereolabs::ZedCameraComponent::on_activate(const rclcpp_lifecycle::State&)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2014:56: error: ‘MODEL_ZED_M’ is not a member of ‘sl’
if (mImuPubRate > 0 && mZedRealCamModel == sl::MODEL_ZED_M) {
^~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2044:56: error: ‘MODEL_ZED_M’ is not a member of ‘sl’
if (mImuPubRate > 0 && mZedRealCamModel == sl::MODEL_ZED_M) {
^~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘virtual rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn stereolabs::ZedCameraComponent::on_deactivate(const rclcpp_lifecycle::State&)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2145:56: error: ‘MODEL_ZED_M’ is not a member of ‘sl’
if (mImuPubRate > 0 && mZedRealCamModel == sl::MODEL_ZED_M) {
^~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::zedGrabThreadFunc()’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2215:74: error: ‘TIME_REFERENCE_CURRENT’ is not a member of ‘sl’
mFrameTimestamp = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_CURRENT));
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2215:74: note: suggested alternative: ‘TIME_REFERENCE’
mFrameTimestamp = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_CURRENT));
^~~~~~~~~~~~~~~~~~~~~~
TIME_REFERENCE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2277:85: error: ‘DEPTH_MODE_NONE’ is not a member of ‘sl’
if ((computeTracking) && !mTrackingActivated && (mZedQuality != sl::DEPTH_MODE_NONE)) { // Start the tracking
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2277:85: note: suggested alternative: ‘DEPTH_MODE’
if ((computeTracking) && !mTrackingActivated && (mZedQuality != sl::DEPTH_MODE_NONE)) { // Start the tracking
^~~~~~~~~~~~~~~
DEPTH_MODE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2281:26: error: ‘class sl::Camera’ has no member named ‘disableTracking’; did you mean ‘disableStreaming’?
mZed.disableTracking();
^~~~~~~~~~~~~~~
disableStreaming
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2287:50: error: ‘class sl::Camera’ has no member named ‘getConfidenceThreshold’
int actual_confidence = mZed.getConfidenceThreshold();
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2290:30: error: ‘class sl::Camera’ has no member named ‘setConfidenceThreshold’
mZed.setConfidenceThreshold(mZedConfidence);
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2293:72: error: ‘class sl::Camera’ has no member named ‘getDepthMaxRangeValue’
double actual_max_depth = static_cast(mZed.getDepthMaxRangeValue());
^~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2296:30: error: ‘class sl::Camera’ has no member named ‘setDepthMaxRangeValue’
mZed.setDepthMaxRangeValue(static_cast(mZedMaxDepth));
^~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2309:82: error: ‘TIME_REFERENCE_CURRENT’ is not a member of ‘sl’
mFrameTimestamp = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_CURRENT));
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2309:82: note: suggested alternative: ‘TIME_REFERENCE’
mFrameTimestamp = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_CURRENT));
^~~~~~~~~~~~~~~~~~~~~~
TIME_REFERENCE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2311:82: error: ‘TIME_REFERENCE_IMAGE’ is not a member of ‘sl’
mFrameTimestamp = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_IMAGE));
^~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2311:82: note: suggested alternative: ‘TIME_REFERENCE’
mFrameTimestamp = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_IMAGE));
^~~~~~~~~~~~~~~~~~~~
TIME_REFERENCE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2320:44: error: ‘ERROR_CODE_NOT_A_NEW_FRAME’ is not a member of ‘sl’
if (grab_status != sl::ERROR_CODE_NOT_A_NEW_FRAME) {
^~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2327:83: error: ‘TIME_REFERENCE_CURRENT’ is not a member of ‘sl’
rclcpp::Time now = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_CURRENT));
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2327:83: note: suggested alternative: ‘TIME_REFERENCE’
rclcpp::Time now = sl_tools::slTime2Ros(mZed.getTimestamp(sl::TIME_REFERENCE_CURRENT));
^~~~~~~~~~~~~~~~~~~~~~
TIME_REFERENCE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2351:21: error: ‘mRecState’ was not declared in this scope
mRecState = mZed.record();
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2351:21: note: suggested alternative: ‘mRecMutex’
mRecState = mZed.record();
^~~~~~~~~
mRecMutex
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2351:38: error: ‘class sl::Camera’ has no member named ‘record’; did you mean ‘reboot’?
mRecState = mZed.record();
^~~~~~
reboot
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2378:52: error: ‘CAMERA_SETTINGS_EXPOSURE’ is not a member of ‘sl’
mZed.setCameraSettings(sl::CAMERA_SETTINGS_EXPOSURE, 0, true);
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2383:52: error: ‘CAMERA_SETTINGS_EXPOSURE’ is not a member of ‘sl’
mZed.getCameraSettings(sl::CAMERA_SETTINGS_EXPOSURE);
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2386:52: error: ‘CAMERA_SETTINGS_EXPOSURE’ is not a member of ‘sl’
mZed.setCameraSettings(sl::CAMERA_SETTINGS_EXPOSURE, mZedExposure);
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2389:66: error: ‘CAMERA_SETTINGS_GAIN’ is not a member of ‘sl’
int actual_gain = mZed.getCameraSettings(sl::CAMERA_SETTINGS_GAIN);
^~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2389:66: note: suggested alternative: ‘VIDEO_SETTINGS’
int actual_gain = mZed.getCameraSettings(sl::CAMERA_SETTINGS_GAIN);
^~~~~~~~~~~~~~~~~~~~
VIDEO_SETTINGS
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2392:52: error: ‘CAMERA_SETTINGS_GAIN’ is not a member of ‘sl’
mZed.setCameraSettings(sl::CAMERA_SETTINGS_GAIN, mZedGain);
^~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2392:52: note: suggested alternative: ‘VIDEO_SETTINGS’
mZed.setCameraSettings(sl::CAMERA_SETTINGS_GAIN, mZedGain);
^~~~~~~~~~~~~~~~~~~~
VIDEO_SETTINGS
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::publishImages(rclcpp::Time)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2466:48: error: ‘VIEW_LEFT’ is not a member of ‘sl’
mZed.retrieveImage(leftZEDMat, sl::VIEW_LEFT, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2466:63: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveImage(leftZEDMat, sl::VIEW_LEFT, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2484:48: error: ‘VIEW_LEFT_UNRECTIFIED’ is not a member of ‘sl’
mZed.retrieveImage(leftZEDMat, sl::VIEW_LEFT_UNRECTIFIED, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2484:75: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveImage(leftZEDMat, sl::VIEW_LEFT_UNRECTIFIED, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2502:49: error: ‘VIEW_RIGHT’ is not a member of ‘sl’
mZed.retrieveImage(rightZEDMat, sl::VIEW_RIGHT, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2502:65: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveImage(rightZEDMat, sl::VIEW_RIGHT, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2513:49: error: ‘VIEW_RIGHT_UNRECTIFIED’ is not a member of ‘sl’
mZed.retrieveImage(rightZEDMat, sl::VIEW_RIGHT_UNRECTIFIED, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2513:77: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveImage(rightZEDMat, sl::VIEW_RIGHT_UNRECTIFIED, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::publishDepthData(rclcpp::Time)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2533:51: error: ‘MEASURE_DEPTH’ is not a member of ‘sl’
mZed.retrieveMeasure(depthZEDMat, sl::MEASURE_DEPTH, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2533:51: note: suggested alternative: ‘MEASURE’
mZed.retrieveMeasure(depthZEDMat, sl::MEASURE_DEPTH, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~
MEASURE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2533:70: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveMeasure(depthZEDMat, sl::MEASURE_DEPTH, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2545:55: error: ‘VIEW_CONFIDENCE’ is not a member of ‘sl’
mZed.retrieveImage(confImgZedMat, sl::VIEW_CONFIDENCE, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2545:76: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveImage(confImgZedMat, sl::VIEW_CONFIDENCE, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2551:57: error: ‘MEASURE_CONFIDENCE’ is not a member of ‘sl’
mZed.retrieveMeasure(confMapZedMat, sl::MEASURE_CONFIDENCE, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2551:81: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveMeasure(confMapZedMat, sl::MEASURE_CONFIDENCE, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2561:55: error: ‘MEASURE_DISPARITY’ is not a member of ‘sl’
mZed.retrieveMeasure(disparityZEDMat, sl::MEASURE_DISPARITY, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2561:78: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveMeasure(disparityZEDMat, sl::MEASURE_DISPARITY, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2576:50: error: ‘MEASURE_XYZBGRA’ is not a member of ‘sl’
mZed.retrieveMeasure(mCloud, sl::MEASURE_XYZBGRA, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2576:71: error: ‘MEM_CPU’ is not a member of ‘sl’
mZed.retrieveMeasure(mCloud, sl::MEASURE_XYZBGRA, sl::MEM_CPU, mMatWidth, mMatHeight);
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::publishDisparity(sl::Mat, rclcpp::Time)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2729:50: error: ‘class sl::Camera’ has no member named ‘getDepthMaxRangeValue’
msg.min_disparity = msg.f * msg.t / mZed.getDepthMaxRangeValue();
^~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2730:50: error: ‘class sl::Camera’ has no member named ‘getDepthMinRangeValue’
msg.max_disparity = msg.f * msg.t / mZed.getDepthMinRangeValue();
^~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::imuPubCallback()’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2935:13: error: ‘IMUData’ is not a member of ‘sl’
sl::IMUData imu_data;
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2936:14: error: ‘class sl::Camera’ has no member named ‘getIMUData’
mZed.getIMUData(imu_data, sl::TIME_REFERENCE_CURRENT);
^~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2936:25: error: ‘imu_data’ was not declared in this scope
mZed.getIMUData(imu_data, sl::TIME_REFERENCE_CURRENT);
^~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2936:39: error: ‘TIME_REFERENCE_CURRENT’ is not a member of ‘sl’
mZed.getIMUData(imu_data, sl::TIME_REFERENCE_CURRENT);
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:2936:39: note: suggested alternative: ‘TIME_REFERENCE’
mZed.getIMUData(imu_data, sl::TIME_REFERENCE_CURRENT);
^~~~~~~~~~~~~~~~~~~~~~
TIME_REFERENCE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::startTracking()’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3083:13: error: ‘TrackingParameters’ is not a member of ‘sl’
sl::TrackingParameters trackParams;
^~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3083:13: note: suggested alternative: ‘StreamingParameters’
sl::TrackingParameters trackParams;
^~~~~~~~~~~~~~~~~~
StreamingParameters
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3084:9: error: ‘trackParams’ was not declared in this scope
trackParams.area_file_path = mOdometryDb.c_str();
^~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3084:9: note: suggested alternative: ‘mZedParams’
trackParams.area_file_path = mOdometryDb.c_str();
^~~~~~~~~~~
mZedParams
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3091:35: error: ‘class sl::Camera’ has no member named ‘enableTracking’; did you mean ‘enableStreaming’?
sl::ERROR_CODE err = mZed.enableTracking(trackParams);
^~~~~~~~~~~~~~
enableStreaming
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3093:24: error: ‘SUCCESS’ is not a member of ‘sl’
if (err == sl::SUCCESS) {
^~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::processOdometry()’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3181:13: error: ‘mTrackingStatus’ was not declared in this scope
mTrackingStatus = mZed.getPosition(deltaOdom, sl::REFERENCE_FRAME_CAMERA);
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3181:13: note: suggested alternative: ‘mTrackingReady’
mTrackingStatus = mZed.getPosition(deltaOdom, sl::REFERENCE_FRAME_CAMERA);
^~~~~~~~~~~~~~~
mTrackingReady
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3181:63: error: ‘REFERENCE_FRAME_CAMERA’ is not a member of ‘sl’
mTrackingStatus = mZed.getPosition(deltaOdom, sl::REFERENCE_FRAME_CAMERA);
^~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3181:63: note: suggested alternative: ‘REFERENCE_FRAME’
mTrackingStatus = mZed.getPosition(deltaOdom, sl::REFERENCE_FRAME_CAMERA);
^~~~~~~~~~~~~~~~~~~~~~
REFERENCE_FRAME
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3191:40: error: ‘TRACKING_STATE_OK’ is not a member of ‘sl’
if (mTrackingStatus == sl::TRACKING_STATE_OK || mTrackingStatus == sl::TRACKING_STATE_SEARCHING ||
^~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3191:40: note: suggested alternative: ‘OBJECT_TRACKING_STATE’
if (mTrackingStatus == sl::TRACKING_STATE_OK || mTrackingStatus == sl::TRACKING_STATE_SEARCHING ||
^~~~~~~~~~~~~~~~~
OBJECT_TRACKING_STATE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3191:84: error: ‘TRACKING_STATE_SEARCHING’ is not a member of ‘sl’
if (mTrackingStatus == sl::TRACKING_STATE_OK || mTrackingStatus == sl::TRACKING_STATE_SEARCHING ||
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3192:40: error: ‘TRACKING_STATE_FPS_TOO_LOW’ is not a member of ‘sl’
mTrackingStatus == sl::TRACKING_STATE_FPS_TOO_LOW) {
^~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::processPose()’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3327:20: error: ‘TRACKING_STATE’ in namespace ‘sl’ does not name a type
static sl::TRACKING_STATE oldStatus;
^~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3328:9: error: ‘mTrackingStatus’ was not declared in this scope
mTrackingStatus = mZed.getPosition(mLastZedPose, sl::REFERENCE_FRAME_WORLD);
^~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3328:9: note: suggested alternative: ‘mTrackingReady’
mTrackingStatus = mZed.getPosition(mLastZedPose, sl::REFERENCE_FRAME_WORLD);
^~~~~~~~~~~~~~~
mTrackingReady
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3328:62: error: ‘REFERENCE_FRAME_WORLD’ is not a member of ‘sl’
mTrackingStatus = mZed.getPosition(mLastZedPose, sl::REFERENCE_FRAME_WORLD);
^~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3328:62: note: suggested alternative: ‘REFERENCE_FRAME’
mTrackingStatus = mZed.getPosition(mLastZedPose, sl::REFERENCE_FRAME_WORLD);
^~~~~~~~~~~~~~~~~~~~~
REFERENCE_FRAME
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3345:36: error: ‘TRACKING_STATE_OK’ is not a member of ‘sl’
if (mTrackingStatus == sl::TRACKING_STATE_OK ||
^~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3345:36: note: suggested alternative: ‘OBJECT_TRACKING_STATE’
if (mTrackingStatus == sl::TRACKING_STATE_OK ||
^~~~~~~~~~~~~~~~~
OBJECT_TRACKING_STATE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3346:36: error: ‘TRACKING_STATE_SEARCHING’ is not a member of ‘sl’
mTrackingStatus == sl::TRACKING_STATE_SEARCHING /|| status == sl::TRACKING_STATE_FPS_TOO_LOW*/) {
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3391:52: error: ‘TRACKING_STATE_OK’ is not a member of ‘sl’
initOdom = (mTrackingStatus == sl::TRACKING_STATE_OK) & mInitOdomWithPose;
^~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3391:52: note: suggested alternative: ‘OBJECT_TRACKING_STATE’
initOdom = (mTrackingStatus == sl::TRACKING_STATE_OK) & mInitOdomWithPose;
^~~~~~~~~~~~~~~~~
OBJECT_TRACKING_STATE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3430:9: error: ‘oldStatus’ was not declared in this scope
oldStatus = mTrackingStatus;
^~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3430:9: note: suggested alternative: ‘si_status’
oldStatus = mTrackingStatus;
^~~~~~~~~
si_status
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::on_restart_tracking(std::shared_ptr<rmw_request_id_t>, std::shared_ptr<stereolabs_zed_interfaces::srv::RestartTracking_Request<std::allocator > >, std::shared_ptr<stereolabs_zed_interfaces::srv::RestartTracking_Response<std::allocator > >)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3687:14: error: ‘class sl::Camera’ has no member named ‘disableTracking’; did you mean ‘disableStreaming’?
mZed.disableTracking();
^~~~~~~~~~~~~~~
disableStreaming
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::on_set_pose(std::shared_ptr<rmw_request_id_t>, std::shared_ptr<stereolabs_zed_interfaces::srv::SetPose_Request<std::allocator > >, std::shared_ptr<stereolabs_zed_interfaces::srv::SetPose_Response<std::allocator > >)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3719:14: error: ‘class sl::Camera’ has no member named ‘disableTracking’; did you mean ‘disableStreaming’?
mZed.disableTracking();
^~~~~~~~~~~~~~~
disableStreaming
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp: In member function ‘void stereolabs::ZedCameraComponent::on_start_svo_recording(std::shared_ptr<rmw_request_id_t>, std::shared_ptr<stereolabs_zed_interfaces::srv::StartSvoRecording_Request_<std::allocator > >, std::shared_ptr<stereolabs_zed_interfaces::srv::StartSvoRecording_Response_<std::allocator > >)’:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3747:52: error: ‘SVO_COMPRESSION_MODE_RAW’ is not a member of ‘sl’
sl::SVO_COMPRESSION_MODE compression = sl::SVO_COMPRESSION_MODE_RAW;
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3747:52: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
sl::SVO_COMPRESSION_MODE compression = sl::SVO_COMPRESSION_MODE_RAW;
^~~~~~~~~~~~~~~~~~~~~~~~
SVO_COMPRESSION_MODE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3750:31: error: ‘SVO_COMPRESSION_MODE_HEVC’ is not a member of ‘sl’
compression = sl::SVO_COMPRESSION_MODE_HEVC;
^~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3750:31: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
compression = sl::SVO_COMPRESSION_MODE_HEVC;
^~~~~~~~~~~~~~~~~~~~~~~~~
SVO_COMPRESSION_MODE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3751:78: error: no matching function for call to ‘sl::Camera::enableRecording(const char*, sl::SVO_COMPRESSION_MODE&)’
err = mZed.enableRecording(req->svo_filename.c_str(), compression); // H265 Compression?
^
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:63:0,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate: sl::ERROR_CODE sl::Camera::enableRecording(sl::RecordingParameters)
ERROR_CODE enableRecording(RecordingParameters recording_parameters);
^~~~~~~~~~~~~~~
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate expects 1 argument, 2 provided
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3753:28: error: ‘ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION’ is not a member of ‘sl’
if (err == sl::ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION) {
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In file included from /opt/ros/crystal/include/rclcpp/client.hpp:39:0,
from /opt/ros/crystal/include/rclcpp/callback_group.hpp:23,
from /opt/ros/crystal/include/rclcpp/any_executable.hpp:20,
from /opt/ros/crystal/include/rclcpp/memory_strategy.hpp:24,
from /opt/ros/crystal/include/rclcpp/memory_strategies.hpp:18,
from /opt/ros/crystal/include/rclcpp/executor.hpp:32,
from /opt/ros/crystal/include/rclcpp/executors/multi_threaded_executor.hpp:24,
from /opt/ros/crystal/include/rclcpp/executors.hpp:21,
from /opt/ros/crystal/include/rclcpp/rclcpp.hpp:144,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:35,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3755:46: error: ‘SVO_COMPRESSION_MODE_AVCHD’ is not a member of ‘sl’
sl::toString(sl::SVO_COMPRESSION_MODE_AVCHD).c_str());
^
/opt/ros/crystal/include/rcutils/logging_macros.h:72:64: note: in definition of macro ‘RCUTILS_LOG_COND_NAMED’
rcutils_log(&__rcutils_logging_location, severity, name, VA_ARGS);
^~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:302:3: note: in expansion of macro ‘RCUTILS_LOG_WARN_NAMED’
RCUTILS_LOG_WARN_NAMED(
^~~~~~~~~~~~~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:305:7: note: in expansion of macro ‘RCLCPP_ALL_BUT_FIRST_ARGS’
RCLCPP_ALL_BUT_FIRST_ARGS(VA_ARGS,""))
^~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3754:17: note: in expansion of macro ‘RCLCPP_WARN’
RCLCPP_WARN(get_logger(), " %s not available. Trying %s", sl::toString(compression).c_str(),
^
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3755:46: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
sl::toString(sl::SVO_COMPRESSION_MODE_AVCHD).c_str());
^
/opt/ros/crystal/include/rcutils/logging_macros.h:72:64: note: in definition of macro ‘RCUTILS_LOG_COND_NAMED’
rcutils_log(&__rcutils_logging_location, severity, name, VA_ARGS);
^~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:302:3: note: in expansion of macro ‘RCUTILS_LOG_WARN_NAMED’
RCUTILS_LOG_WARN_NAMED(
^~~~~~~~~~~~~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:305:7: note: in expansion of macro ‘RCLCPP_ALL_BUT_FIRST_ARGS’
RCLCPP_ALL_BUT_FIRST_ARGS(VA_ARGS,""))
^~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3754:17: note: in expansion of macro ‘RCLCPP_WARN’
RCLCPP_WARN(get_logger(), " %s not available. Trying %s", sl::toString(compression).c_str(),
^
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3756:35: error: ‘SVO_COMPRESSION_MODE_AVCHD’ is not a member of ‘sl’
compression = sl::SVO_COMPRESSION_MODE_AVCHD;
^~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3756:35: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
compression = sl::SVO_COMPRESSION_MODE_AVCHD;
^~~~~~~~~~~~~~~~~~~~~~~~~~
SVO_COMPRESSION_MODE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3757:82: error: no matching function for call to ‘sl::Camera::enableRecording(const char*, sl::SVO_COMPRESSION_MODE&)’
err = mZed.enableRecording(req->svo_filename.c_str(), compression); // H264 Compression?
^
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:63:0,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate: sl::ERROR_CODE sl::Camera::enableRecording(sl::RecordingParameters)
ERROR_CODE enableRecording(RecordingParameters recording_parameters);
^~~~~~~~~~~~~~~
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate expects 1 argument, 2 provided
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3759:32: error: ‘ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION’ is not a member of ‘sl’
if (err == sl::ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION) {
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In file included from /opt/ros/crystal/include/rclcpp/client.hpp:39:0,
from /opt/ros/crystal/include/rclcpp/callback_group.hpp:23,
from /opt/ros/crystal/include/rclcpp/any_executable.hpp:20,
from /opt/ros/crystal/include/rclcpp/memory_strategy.hpp:24,
from /opt/ros/crystal/include/rclcpp/memory_strategies.hpp:18,
from /opt/ros/crystal/include/rclcpp/executor.hpp:32,
from /opt/ros/crystal/include/rclcpp/executors/multi_threaded_executor.hpp:24,
from /opt/ros/crystal/include/rclcpp/executors.hpp:21,
from /opt/ros/crystal/include/rclcpp/rclcpp.hpp:144,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:35,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3761:50: error: ‘SVO_COMPRESSION_MODE_LOSSY’ is not a member of ‘sl’
sl::toString(sl::SVO_COMPRESSION_MODE_LOSSY).c_str());
^
/opt/ros/crystal/include/rcutils/logging_macros.h:72:64: note: in definition of macro ‘RCUTILS_LOG_COND_NAMED’
rcutils_log(&__rcutils_logging_location, severity, name, VA_ARGS);
^~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:302:3: note: in expansion of macro ‘RCUTILS_LOG_WARN_NAMED’
RCUTILS_LOG_WARN_NAMED(
^~~~~~~~~~~~~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:305:7: note: in expansion of macro ‘RCLCPP_ALL_BUT_FIRST_ARGS’
RCLCPP_ALL_BUT_FIRST_ARGS(VA_ARGS,""))
^~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3760:21: note: in expansion of macro ‘RCLCPP_WARN’
RCLCPP_WARN(get_logger(), " %s not available. Trying %s", sl::toString(compression).c_str(),
^
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3761:50: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
sl::toString(sl::SVO_COMPRESSION_MODE_LOSSY).c_str());
^
/opt/ros/crystal/include/rcutils/logging_macros.h:72:64: note: in definition of macro ‘RCUTILS_LOG_COND_NAMED’
rcutils_log(&__rcutils_logging_location, severity, name, VA_ARGS);
^~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:302:3: note: in expansion of macro ‘RCUTILS_LOG_WARN_NAMED’
RCUTILS_LOG_WARN_NAMED(
^~~~~~~~~~~~~~~~~~~~~~
/opt/ros/crystal/include/rclcpp/logging.hpp:305:7: note: in expansion of macro ‘RCLCPP_ALL_BUT_FIRST_ARGS’
RCLCPP_ALL_BUT_FIRST_ARGS(VA_ARGS,""))
^~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3760:21: note: in expansion of macro ‘RCLCPP_WARN’
RCLCPP_WARN(get_logger(), " %s not available. Trying %s", sl::toString(compression).c_str(),
^
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3762:39: error: ‘SVO_COMPRESSION_MODE_LOSSY’ is not a member of ‘sl’
compression = sl::SVO_COMPRESSION_MODE_LOSSY;
^~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3762:39: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
compression = sl::SVO_COMPRESSION_MODE_LOSSY;
^~~~~~~~~~~~~~~~~~~~~~~~~~
SVO_COMPRESSION_MODE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3763:86: error: no matching function for call to ‘sl::Camera::enableRecording(const char*, sl::SVO_COMPRESSION_MODE&)’
err = mZed.enableRecording(req->svo_filename.c_str(), compression); // JPEG Compression?
^
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:63:0,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate: sl::ERROR_CODE sl::Camera::enableRecording(sl::RecordingParameters)
ERROR_CODE enableRecording(RecordingParameters recording_parameters);
^~~~~~~~~~~~~~~
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate expects 1 argument, 2 provided
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3768:24: error: ‘ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION’ is not a member of ‘sl’
if (err == sl::ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION) {
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3769:31: error: ‘SVO_COMPRESSION_MODE_RAW’ is not a member of ‘sl’
compression = sl::SVO_COMPRESSION_MODE_RAW;
^~~~~~~~~~~~~~~~~~~~~~~~
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3769:31: note: suggested alternative: ‘SVO_COMPRESSION_MODE’
compression = sl::SVO_COMPRESSION_MODE_RAW;
^~~~~~~~~~~~~~~~~~~~~~~~
SVO_COMPRESSION_MODE
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3770:78: error: no matching function for call to ‘sl::Camera::enableRecording(const char*, sl::SVO_COMPRESSION_MODE&)’
err = mZed.enableRecording(req->svo_filename.c_str(), compression);
^
In file included from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/include/zed_component.hpp:63:0,
from /home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:21:
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate: sl::ERROR_CODE sl::Camera::enableRecording(sl::RecordingParameters)
ERROR_CODE enableRecording(RecordingParameters recording_parameters);
^~~~~~~~~~~~~~~
/usr/local/zed/include/sl/Camera.hpp:7106:20: note: candidate expects 1 argument, 2 provided
/home/jin/ros2_ws/src/zed-ros2-wrapper/zed_wrapper/src/component/src/zed_component.cpp:3778:24: error: ‘SUCCESS’ is not a member of ‘sl’
if (err != sl::SUCCESS) {
^~~~~~~
make[1]: *** [CMakeFiles/zed_tf_broadcaster.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
make[2]: *** [CMakeFiles/zed_component.dir/src/component/src/zed_component.cpp.o] Error 1
make[1]: *** [CMakeFiles/zed_component.dir/all] Error 2
make[1]: *** [CMakeFiles/zed_it_broadcaster.dir/all] Error 2
make: *** [all] Error 2
Failed <<< stereolabs_zed [ Exited with code 2 ]
Summary: 0 packages finished [22.3s]
1 package failed: stereolabs_zed
1 package had stderr output: stereolabs_zed
i am getting one error when i execute the following command to install the zed-ros2-wrapper into my work space of ros2 dashing:
"colcon build --symlink-install --packages-select stereolabs_zed --cmake-args=-DCMAKE_BUILD_TYPE=Release"
error:
Starting >>> stereolabs_zed
[Processing: stereolabs_zed]
--- stderr: stereolabs_zed
CMake Error at CMakeLists.txt:58 (find_package):
By not providing "Findimage_transport.cmake" in CMAKE_MODULE_PATH this
project has asked CMake to find a package configuration file provided by
"image_transport", but CMake did not find one.
Could not find a package configuration file provided by "image_transport"
with any of the following names:
image_transportConfig.cmake
image_transport-config.cmake
Add the installation prefix of "image_transport" to CMAKE_PREFIX_PATH or
set "image_transport_DIR" to a directory containing one of the above files.
If "image_transport" provides a separate development package or SDK, be
sure it has been installed.
i try to source the setup file(local and main) but don't work.
When building the Zed ROS2 wrapper in a docker image based on an Nvidia docker, the wrapper can not find Cuda, and complains that the version that it finds (10.2) is wrong, even though it explicitly states that it has found the correct version (10.2).
Previous issue #18 solves this by downloading SDK v3.3 and sourcing ROS2 Foxy correctly. I fail to see how that would make sense as this dockerfile is essentially untouched ROS-wise before this stage. We are using SDK version 3.5, as is recommended on https://github.com/stereolabs/zed-ros2-wrapper.
Previously, we have mounted folders from host computers into the docker environment and built from that workspace, which has worked fine. We encounter this problem because we are slimming our workspace, and hence moving the Zed stuff to the docker build process.
RUN apt-get update -y && apt-get install --no-install-recommends lsb-release wget less udev sudo build-essential cmake -y && \
wget -q --no-check-certificate -O ZED_SDK_Linux_JP.run https://download.stereolabs.com/zedsdk/3.5/jp45/jetsons && \
chmod +x ZED_SDK_Linux_JP.run ; ./ZED_SDK_Linux_JP.run silent skip_tools && \
rm -rf /usr/local/zed/resources/* \
rm -rf ZED_SDK_Linux_JP.run && \
rm -rf /var/lib/apt/lists/*
colcon build --merge-install --packages-select-regex zed.* --cmake-args "-DCMAKE_BUILD_TYPE=Release" "-DCMAKE_LIBRARY_PATH=/usr/local/cuda/lib64/stubs" "-DCUDA_CUDART_LIBRARY=/usr/local/cuda/lib64/stubs" "-DCMAKE_CXX_FLAGS='-Wl,--allow-shlib-undefined'" as per #18Package finds appropriate dependencies and builds happily.
Starting >>> zed_interfaces
Finished <<< zed_interfaces [1.90s]
Starting >>> zed_components
--- stderr: zed_components
CMake Error at /usr/share/cmake-3.21/Modules/FindPackageHandleStandardArgs.cmake:230 (message):
Could NOT find CUDA (missing: CUDA_CUDART_LIBRARY) (found suitable version
"10.2", minimum required is "10.2")
Call Stack (most recent call first):
/usr/share/cmake-3.21/Modules/FindPackageHandleStandardArgs.cmake:594 (_FPHSA_FAILURE_MESSAGE)
/usr/share/cmake-3.21/Modules/FindCUDA.cmake:1264 (find_package_handle_standard_args)
/usr/local/zed/zed-config.cmake:72 (find_package)
CMakeLists.txt:39 (find_package)
---
Failed <<< zed_components [0.79s, exited with code 1]
It finds 10.2, yet thinks that it is another version than 10.2. What?
ZED2
OS: Ubuntu 18.04, from docker image above
CPU: ARM
GPU: Nvidia Jetson AGX Xavier
Other info: ROS2, Foxy. Many packages are built before Zed is built, but they have been left out for brevity. Do tell me if you want a full list.No response
Describe the bug
When launching the zed-ros2-wrapper with the image_transport_plugins installed, the below errors are observed and compressed image topics are not available.
Device information:
master, last commit via git log:commit 11ca6484df8aaf2cc6a0ecb524182c0d93c56c42 (HEAD -> master, origin/master, origin/HEAD)
Merge: f7bb886 ade4cb2
Author: Walter Lucetti <[email protected]>
Date: Thu Dec 3 14:17:52 2020 +0100
To Reproduce
$ cd ~/my-foxy-workspace/src
$ git clone https://github.com/stereolabs/zed-ros2-wrapper.git
$ cd ~/my-foxy-workspace
$ rosdep install --from-paths src --ignore-src --rosdistro foxy -y --skip-keys "console_bridge fastcdr fastrtps rti-connext-dds-5.3.1 urdfdom_headers"
$ colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release$ cd ~/my-foxy-workspace/src
$ git clone [email protected]:ros-perception/image_transport_plugins.git
# this needs to be on the same branch as the image_common dependency
$ cd image_transport_plugins && git checkout ros2
# hence:
$ cd ~/my-foxy-workspace/src/image_common && git checkout ros2
$ rosdep install --from-paths src --ignore-src --rosdistro foxy -y --skip-keys "console_bridge fastcdr fastrtps rti-connext-dds-5.3.1 urdfdom_headers"
$ colcon build --symlink-install$ ros2 launch zed_wrapper zed2.launch.py
...
[zed_wrapper-2] 1616597777.165880326 [zed2.zed_node] [INFO] * Right Temperature -> zed2_right_camera_frame
[zed_wrapper-2] 1616597777.166162383 [zed2.zed_node] [INFO] *** PUBLISHED TOPICS ***
[zed_wrapper-2] 1616597777.288631336 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'format' could not be set: Not supported
[zed_wrapper-2]
[zed_wrapper-2] 1616597777.299310657 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/image_rect_color
[zed_wrapper-2] 1616597777.300331471 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'format' has already been declared
[zed_wrapper-2]
[zed_wrapper-2] 1616597777.301188885 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/image_rect_gray
[zed_wrapper-2] 1616597777.301215098 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/camera_info
[zed_wrapper-2] 1616597777.302073967 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'format' has already been declared
[zed_wrapper-2]
[zed_wrapper-2] 1616597777.302909071 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] 1616597777.303637059 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'format' has already been declaredimage_transport_plugins:$ find image_transport_plugins/ -name compressed_publisher.cpp
image_transport_plugins/compressed_image_transport/src/compressed_publisher.cpp
# Download compressed_publisher.cpp containing the fixes from the MR
# Rebuild your workspace and/or the ws that contains image_transport_plugins$ ros2 launch zed_wrapper zed2.launch.py
...
[zed_wrapper-2] 1616598630.319304068 [zed2.zed_node] [INFO] * Right Temperature -> zed2_right_camera_frame
[zed_wrapper-2] 1616598630.319344545 [zed2.zed_node] [INFO] *** PUBLISHED TOPICS ***
[zed_wrapper-2] 1616598630.382450727 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'zed_node.rgb.image_rect_color.format' could not be set: Not supported
[zed_wrapper-2]
[zed_wrapper-2] 1616598630.388444699 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/image_rect_color
[zed_wrapper-2] 1616598630.389348695 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'zed_node.rgb.image_rect_gray.format' could not be set: Not supported
[zed_wrapper-2]
[zed_wrapper-2] 1616598630.390243071 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/image_rect_gray
[zed_wrapper-2] 1616598630.390296178 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/camera_info
[zed_wrapper-2] 1616598630.391076111 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'zed_node.rgb_raw.image_raw_color.format' could not be set: Not supported
[zed_wrapper-2]
[zed_wrapper-2] 1616598630.391579021 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] 1616598630.392199161 [zed2.zed_node] [ERROR] Failed to load plugin image_transport/compressed_pub, error string: parameter 'zed_node.rgb_raw.image_raw_gray.format' could not be set: Not supported
Expected behavior
We expect to see valid compressed image topics, e.g.
$ ros2 topic list
/zed2/zed_node/rgb/image_rect_color
/zed2/zed_node/rgb/image_rect_color/compressed
/zed2/zed_node/rgb/image_rect_color/compressedDepth
Additional context
Walter from Stereolabs reports that the parameters around JPEG compression do not exist in ROS2-eloquent when running:
# in eloquent...
$ ros2 param listI saw a support of ZED 2i on Foxy, Could you make it available for Eloquent as well?
Hello,
would it be possible to open the mZed camera with an ip address? I would like to stream multiple zed2 cameras over the network and do image and depth evaluation on another pc. As a requirement it is necessary to have all components talking over ros2 but running the ros2-zed2-node on the Jetson Nano itself is not optimal.
Describe the bug
A clear and concise description of what the bug is.
Device information:
Screenshots
/home/nvidia/ZED2/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp:1970:63: error: invalid operands of types ‘const char [21]’ and int’ to binary ‘operator<<’
RCLCPP_DEBUG_STREAM( get_logger(), "Camera Frame size : " << mCamWidth << "x" << mCamHeight);
~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~
/home/nvidia/ZED2/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp:1970:5: error: ‘RCLCPP_DEBUG_STREAM’ was not declared in this scope
RCLCPP_DEBUG_STREAM( get_logger(), "Camera Frame size : " << mCamWidth << "x" << mCamHeight);
^~~~~~~~~~~~~~~~~~~
/home/nvidia/ZED2/src/zed-ros2-wrapper/zed_components/src/zed_camera/src/zed_camera_component.cpp:1970:5: note: suggested alternative: ‘RCLCPP_DEBUG_ONCE’
RCLCPP_DEBUG_STREAM( get_logger(), "Camera Frame size : " << mCamWidth << "x" << mCamHeight);
^~~~~~~~~~~~~~~~~~~
RCLCPP_DEBUG_ONCE
make[2]: *** [CMakeFiles/zed_camera_component.dir/src/zed_camera/src/zed_camera_component.cpp.o] Error 1
make[1]: *** [CMakeFiles/zed_camera_component.dir/all] Error 2
make: *** [all] Error 2
Additional context
I am using ROS2-dashing, which compile error
Please provide support for your new ZED2i camera in your ROS2 wrapper for the NVIDIA Jetson community.
Thanks
No response
No response
When I use the camera_name launch argument of the zed_camera.launch.py launch file without using the same value in the configuration file, I get the following warnings from the zed_wrapper node
[zed_wrapper-2] Warning: Invalid frame ID "zed_camera_center" passed to canTransform argument target_frame - frame does not exist
[zed_wrapper-2] at line 133 in /opt/ros/foxy/src/geometry2/tf2/src/buffer_core.cppUse
ros2 launch zed_wrapper zed_camera.launch.py camera_name:=jetson_5 camera_model:=zed2i config_camera_path:="${ROS_WS}/install/zed_wrapper/share/zed_wrapper/config/zed2i.yamlwhere ROS_WS is the path to my ROS workspace.
I expect the zed_wrapper node to look for the same TF frames as the robot_state_publisher node publishes.
The zed_wrapper node doesn't look for the same TF frames as the robot_state_publisher publishes. See below.
[...]
[robot_state_publisher-1] 1640623247.012859 [0] robot_stat: using network interface eth0 (udp/192.168.1.105) selected arbitrarily from: eth0, docker0
[robot_state_publisher-1] Parsing robot urdf xml string.
[robot_state_publisher-1] Link jetson_5_base_link had 1 children
[robot_state_publisher-1] Link jetson_5_camera_center had 2 children
[robot_state_publisher-1] Link jetson_5_left_camera_frame had 1 children
[robot_state_publisher-1] Link jetson_5_left_camera_optical_frame had 0 children
[robot_state_publisher-1] Link jetson_5_right_camera_frame had 1 children
[robot_state_publisher-1] Link jetson_5_right_camera_optical_frame had 0 children
[robot_state_publisher-1] 1640623247.078615524 [jetson_5.zed_state_publisher] [INFO] got segment base_link
[robot_state_publisher-1] 1640623247.079038502 [jetson_5.zed_state_publisher] [INFO] got segment jetson_5_base_link
[robot_state_publisher-1] 1640623247.079149511 [jetson_5.zed_state_publisher] [INFO] got segment jetson_5_camera_center
[robot_state_publisher-1] 1640623247.079236936 [jetson_5.zed_state_publisher] [INFO] got segment jetson_5_left_camera_frame
[robot_state_publisher-1] 1640623247.079319016 [jetson_5.zed_state_publisher] [INFO] got segment jetson_5_left_camera_optical_frame
[robot_state_publisher-1] 1640623247.079401705 [jetson_5.zed_state_publisher] [INFO] got segment jetson_5_right_camera_frame
[robot_state_publisher-1] 1640623247.079520874 [jetson_5.zed_state_publisher] [INFO] got segment jetson_5_right_camera_optical_frame
[...]
[zed_wrapper-2] 1640623249.948735656 [jetson_5.zed_node] [INFO] *** TF FRAMES ***
[zed_wrapper-2] 1640623249.948852425 [jetson_5.zed_node] [INFO] * Map -> map
[zed_wrapper-2] 1640623249.949024362 [jetson_5.zed_node] [INFO] * Odometry -> odom
[zed_wrapper-2] 1640623249.949170891 [jetson_5.zed_node] [INFO] * Base -> base_link
[zed_wrapper-2] 1640623249.949272268 [jetson_5.zed_node] [INFO] * Camera -> zed_camera_center
[zed_wrapper-2] 1640623249.949370349 [jetson_5.zed_node] [INFO] * Left -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.949466989 [jetson_5.zed_node] [INFO] * Left Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1640623249.949564526 [jetson_5.zed_node] [INFO] * RGB -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.949695695 [jetson_5.zed_node] [INFO] * RGB Optical -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.949854832 [jetson_5.zed_node] [INFO] * Right -> zed_right_camera_frame
[zed_wrapper-2] 1640623249.949954769 [jetson_5.zed_node] [INFO] * Right Optical -> zed_right_camera_optical_frame
[zed_wrapper-2] 1640623249.950051122 [jetson_5.zed_node] [INFO] * Depth -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.950147890 [jetson_5.zed_node] [INFO] * Depth Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1640623249.950258771 [jetson_5.zed_node] [INFO] * Point Cloud -> zed_left_camera_optical_frame
[zed_wrapper-2] 1640623249.950387764 [jetson_5.zed_node] [INFO] * Disparity -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.950517653 [jetson_5.zed_node] [INFO] * Disparity Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1640623249.950642614 [jetson_5.zed_node] [INFO] * Confidence -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.950739766 [jetson_5.zed_node] [INFO] * Confidence Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1640623249.950836599 [jetson_5.zed_node] [INFO] * IMU -> zed_imu_link
[zed_wrapper-2] 1640623249.950964920 [jetson_5.zed_node] [INFO] * Barometer -> zed_camera_center
[zed_wrapper-2] 1640623249.951069881 [jetson_5.zed_node] [INFO] * Magnetometer -> zed_imu_link
[zed_wrapper-2] 1640623249.951201818 [jetson_5.zed_node] [INFO] * Left Temperature -> zed_left_camera_frame
[zed_wrapper-2] 1640623249.951333819 [jetson_5.zed_node] [INFO] * Right Temperature -> zed_right_camera_frame
[...]
[zed_wrapper-2] Warning: Invalid frame ID "zed_camera_center" passed to canTransform argument source_frame - frame does not exist
[zed_wrapper-2] at line 133 in /opt/ros/foxy/src/geometry2/tf2/src/buffer_core.cppZED2i
OS: NVIDIA L4T R32.6.1 (Jetpack 4.6)
CPU: ARM
GPU: NVIDIA Jetson Xavier NX
ZED SDK Version: 3.6
ROS distro: foxyI think the issue stems from the zed_camera.launch.py launch argument camera_name not overriding the general.camera_name parameter of the zed_wrapper_node here.
Colcon fails to build the ROS2 wrapper. The problems seems to be zed_components.
cd ~/ros2_ws/src/ #use your current ros2 workspace folder
git clone https://github.com/stereolabs/zed-ros2-wrapper.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
All packages are built
1 package failed: zed_components
1 package had stderr output: zed_components
The whole output is in the following file :
colcon_output.txt
ZED2
OS: Ubuntu focal 20.04
CPU: x86_64
GPU: Nvidia 2060
ZED SDK: Tried with 3.5 and 3.6
ROS: Foxy
CUDA: 11.4No response
Describe the bug
A clear and concise description of what the bug is.
Device information:
To Reproduce
Steps to reproduce the behavior:
/**:
general:
debug_mode: true
sdk_verbose: true
svo_file: path/to/svo_file
svo_loop: false
svo_realtime: true
camera_model: zed2
camera_name: zed2
camera_flip: true
resolution: 2
self_calib: false
grab_frame_rate: 30
pub_frame_rate: 15.0
video:
img_downsample_factor: 0.5
depth:
quality: 1
min_depth: 1.0
max_depth: 10.0
depth_downsample_factor: 0.5
point_cloud_freq: 15.0
pos_tracking:
publish_tf: false
publish_map_tf: false
base_frame: base_linkros2 launch zed_wrapper zed2.launch.pySVO reached the end. The node has been stopped message in the logs. Note, when I change svo_realtime to True, everything works just fine.Expected behavior
The node starts without camera error.
ROS log
[robot_state_publisher-1] Initialize urdf model from file: /workspaces/eloquent/install/zed_wrapper/share/zed_wrapper/urdf/zed2.urdf
[robot_state_publisher-1] Parsing robot urdf xml string.
[robot_state_publisher-1] Link zed2_camera_center had 2 children
[robot_state_publisher-1] Link zed2_left_camera_frame had 1 children
[robot_state_publisher-1] Link zed2_left_camera_optical_frame had 0 children
[robot_state_publisher-1] Link zed2_right_camera_frame had 1 children
[robot_state_publisher-1] Link zed2_right_camera_optical_frame had 0 children
[robot_state_publisher-1] got segment base_link
[robot_state_publisher-1] got segment zed2_camera_center
[robot_state_publisher-1] got segment zed2_left_camera_frame
[robot_state_publisher-1] got segment zed2_left_camera_optical_frame
[robot_state_publisher-1] got segment zed2_right_camera_frame
[robot_state_publisher-1] got segment zed2_right_camera_optical_frame
[robot_state_publisher-1] Adding fixed segment from base_link to zed2_camera_center
[robot_state_publisher-1] Adding fixed segment from zed2_camera_center to zed2_left_camera_frame
[robot_state_publisher-1] Adding fixed segment from zed2_left_camera_frame to zed2_left_camera_optical_frame
[robot_state_publisher-1] Adding fixed segment from zed2_camera_center to zed2_right_camera_frame
[robot_state_publisher-1] Adding fixed segment from zed2_right_camera_frame to zed2_right_camera_optical_frame
[zed_wrapper-2] 1620226849.148992223 [zed24388529.zed_node] [INFO] ********************************
[zed_wrapper-2] 1620226849.149339584 [zed24388529.zed_node] [INFO] ZED Camera Component
[zed_wrapper-2] 1620226849.149460801 [zed24388529.zed_node] [INFO] ********************************
[zed_wrapper-2] 1620226849.149567649 [zed24388529.zed_node] [INFO] * namespace: /zed24388529
[zed_wrapper-2] 1620226849.149644513 [zed24388529.zed_node] [INFO] * node name: zed_node
[zed_wrapper-2] 1620226849.149700833 [zed24388529.zed_node] [INFO] ********************************
[zed_wrapper-2] 1620226849.150225667 [zed24388529.zed_node] [INFO] *** Debug Mode enabled ***
[zed_wrapper-2] 1620226849.150917317 [zed24388529.zed_node] [DEBUG] [ROS2] Using RMW_IMPLEMENTATION = rmw_cyclonedds_cpp
[zed_wrapper-2] 1620226849.151105414 [zed24388529.zed_node] [INFO] *** GENERAL parameters ***
[zed_wrapper-2] 1620226849.151439911 [zed24388529.zed_node] [INFO] * Camera model: zed2 - ZED 2
[zed_wrapper-2] 1620226849.151724551 [zed24388529.zed_node] [INFO] * SDK Verbose: 1
[zed_wrapper-2] 1620226849.151975432 [zed24388529.zed_node] [INFO] * SVO: /workspaces/ssd/recording/ds20210409_sn24388529_ts052613.svo
[zed_wrapper-2] 1620226849.152241193 [zed24388529.zed_node] [INFO] * SVO Loop: TRUE
[zed_wrapper-2] 1620226849.152446058 [zed24388529.zed_node] [INFO] * SVO Realtime: TRUE
[zed_wrapper-2] 1620226849.152643274 [zed24388529.zed_node] [INFO] * Camera name: zed2
[zed_wrapper-2] 1620226849.152902539 [zed24388529.zed_node] [INFO] * Camera ID: 0
[zed_wrapper-2] 1620226849.153110316 [zed24388529.zed_node] [INFO] * Camera SN: 0
[zed_wrapper-2] 1620226849.153302316 [zed24388529.zed_node] [INFO] * Camera timeout [sec]: 5
[zed_wrapper-2] 1620226849.153503597 [zed24388529.zed_node] [INFO] * Camera reconnection temptatives: 5
[zed_wrapper-2] 1620226849.153704173 [zed24388529.zed_node] [INFO] * Camera framerate: 30
[zed_wrapper-2] 1620226849.153912526 [zed24388529.zed_node] [INFO] * GPU ID: -1
[zed_wrapper-2] 1620226849.154190351 [zed24388529.zed_node] [INFO] * Camera resolution: 2 - HD720
[zed_wrapper-2] 1620226849.154393935 [zed24388529.zed_node] [INFO] * Camera self calibration: FALSE
[zed_wrapper-2] 1620226849.154624048 [zed24388529.zed_node] [INFO] * Camera flip: TRUE
[zed_wrapper-2] 1620226849.154810193 [zed24388529.zed_node] [INFO] * [DYN] Publish framerate [Hz]: 15
[zed_wrapper-2] 1620226849.154898481 [zed24388529.zed_node] [INFO] *** VIDEO parameters ***
[zed_wrapper-2] 1620226849.155074322 [zed24388529.zed_node] [INFO] * Use old extrinsic parameters: 0
[zed_wrapper-2] 1620226849.155255378 [zed24388529.zed_node] [INFO] * [DYN] Image downsample factor: 0.5
[zed_wrapper-2] 1620226849.155514323 [zed24388529.zed_node] [INFO] * [DYN] Brightness: 4
[zed_wrapper-2] 1620226849.155703315 [zed24388529.zed_node] [INFO] * [DYN] Contrast: 4
[zed_wrapper-2] 1620226849.155886388 [zed24388529.zed_node] [INFO] * [DYN] Hue: 0
[zed_wrapper-2] 1620226849.157565593 [zed24388529.zed_node] [INFO] * [DYN] Saturation: 4
[zed_wrapper-2] 1620226849.157825178 [zed24388529.zed_node] [INFO] * [DYN] Sharpness: 4
[zed_wrapper-2] 1620226849.158121051 [zed24388529.zed_node] [INFO] * [DYN] Gamma: 8
[zed_wrapper-2] 1620226849.158326043 [zed24388529.zed_node] [INFO] * [DYN] Auto Exposure/Gain: TRUE
[zed_wrapper-2] 1620226849.158569084 [zed24388529.zed_node] [INFO] * [DYN] Exposure: 80
[zed_wrapper-2] 1620226849.158781757 [zed24388529.zed_node] [INFO] * [DYN] Gain: 80
[zed_wrapper-2] 1620226849.158982685 [zed24388529.zed_node] [INFO] * [DYN] Auto White Balance: TRUE
[zed_wrapper-2] 1620226849.159200222 [zed24388529.zed_node] [INFO] * [DYN] White Balance Temperature: 42
[zed_wrapper-2] 1620226849.159403839 [zed24388529.zed_node] [INFO] * Video QoS History: KEEP_LAST
[zed_wrapper-2] 1620226849.159617311 [zed24388529.zed_node] [INFO] * Video QoS History depth: 1
[zed_wrapper-2] 1620226849.159810976 [zed24388529.zed_node] [INFO] * Video QoS Reliability: RELIABLE
[zed_wrapper-2] 1620226849.159989632 [zed24388529.zed_node] [INFO] * Video QoS Durability: VOLATILE
[zed_wrapper-2] 1620226849.160074689 [zed24388529.zed_node] [INFO] *** DEPTH parameters ***
[zed_wrapper-2] 1620226849.160265409 [zed24388529.zed_node] [INFO] * Depth downsample factor: 0.5
[zed_wrapper-2] 1620226849.160481634 [zed24388529.zed_node] [INFO] * Depth quality: 1 - PERFORMANCE
[zed_wrapper-2] 1620226849.160699267 [zed24388529.zed_node] [INFO] * Min depth [m]: 1
[zed_wrapper-2] 1620226849.161513189 [zed24388529.zed_node] [INFO] * Max depth [m]: 10
[zed_wrapper-2] 1620226849.161732678 [zed24388529.zed_node] [INFO] * Depth Sensing Mode: 0 - STANDARD
[zed_wrapper-2] 1620226849.161907718 [zed24388529.zed_node] [INFO] * Depth Stabilization: TRUE
[zed_wrapper-2] 1620226849.162087655 [zed24388529.zed_node] [INFO] * OpenNI mode (16bit point cloud): FALSE
[zed_wrapper-2] 1620226849.162598152 [zed24388529.zed_node] [INFO] * [DYN] Point cloud rate [Hz]: 15
[zed_wrapper-2] 1620226849.162899689 [zed24388529.zed_node] [INFO] * [DYN] Depth Confidence: 50
[zed_wrapper-2] 1620226849.163102090 [zed24388529.zed_node] [INFO] * [DYN] Depth Texture Confidence: 100
[zed_wrapper-2] 1620226849.163282250 [zed24388529.zed_node] [INFO] * Depth QoS History: KEEP_LAST
[zed_wrapper-2] 1620226849.163450123 [zed24388529.zed_node] [INFO] * Depth QoS History depth: 1
[zed_wrapper-2] 1620226849.163660364 [zed24388529.zed_node] [INFO] * Depth QoS Reliability: RELIABLE
[zed_wrapper-2] 1620226849.163837196 [zed24388529.zed_node] [INFO] * Depth QoS Durability: VOLATILE
[zed_wrapper-2] 1620226849.163907340 [zed24388529.zed_node] [INFO] *** POSITIONAL TRACKING parameters ***
[zed_wrapper-2] 1620226849.164083501 [zed24388529.zed_node] [INFO] * Base frame id: base_link
[zed_wrapper-2] 1620226849.164272141 [zed24388529.zed_node] [INFO] * Map frame id: map
[zed_wrapper-2] 1620226849.164465838 [zed24388529.zed_node] [INFO] * Odometry frame id: odom
[zed_wrapper-2] 1620226849.164679055 [zed24388529.zed_node] [INFO] * Broadcast Odometry TF: FALSE
[zed_wrapper-2] 1620226849.164880815 [zed24388529.zed_node] [INFO] * [DYN] Path publishing rate: 2
[zed_wrapper-2] 1620226849.165063504 [zed24388529.zed_node] [INFO] * Path history lenght: -1
[zed_wrapper-2] 1620226849.165267184 [zed24388529.zed_node] [INFO] * Initial pose: [0,0,0,0,0,0,]
[zed_wrapper-2] 1620226849.165474193 [zed24388529.zed_node] [INFO] * Area Memory: TRUE
[zed_wrapper-2] 1620226849.165667154 [zed24388529.zed_node] [INFO] * Area Memory DB:
[zed_wrapper-2] 1620226849.165846738 [zed24388529.zed_node] [INFO] * IMU Fusion [not for ZED]: TRUE
[zed_wrapper-2] 1620226849.166071187 [zed24388529.zed_node] [INFO] * Floor Alignment: FALSE
[zed_wrapper-2] 1620226849.166250547 [zed24388529.zed_node] [INFO] * Init Odometry with first valid pose data: TRUE
[zed_wrapper-2] 1620226849.166429684 [zed24388529.zed_node] [INFO] * 2D mode: FALSE
[zed_wrapper-2] 1620226849.166698517 [zed24388529.zed_node] [INFO] * Pose/Odometry QoS History: KEEP_LAST
[zed_wrapper-2] 1620226849.166867669 [zed24388529.zed_node] [INFO] * Pose/Odometry QoS History depth: 1
[zed_wrapper-2] 1620226849.167026486 [zed24388529.zed_node] [INFO] * Pose/Odometry QoS Reliability: RELIABLE
[zed_wrapper-2] 1620226849.167195830 [zed24388529.zed_node] [INFO] * Pose/Odometry QoS Durability: VOLATILE
[zed_wrapper-2] 1620226849.167287382 [zed24388529.zed_node] [INFO] *** SENSORS STACK parameters ***
[zed_wrapper-2] 1620226849.168104633 [zed24388529.zed_node] [INFO] * Sensors Camera Sync: FALSE
[zed_wrapper-2] 1620226849.168321786 [zed24388529.zed_node] [INFO] * Sensors publishing rate: 400 Hz
[zed_wrapper-2] 1620226849.168508986 [zed24388529.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] 1620226849.168681979 [zed24388529.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-2] 1620226849.168866427 [zed24388529.zed_node] [INFO] * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] 1620226849.169041884 [zed24388529.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] 1620226849.169110716 [zed24388529.zed_node] [INFO] *** Spatial Mapping parameters ***
[zed_wrapper-2] 1620226849.169286813 [zed24388529.zed_node] [INFO] * Spatial Mapping Enabled: FALSE
[zed_wrapper-2] 1620226849.169491357 [zed24388529.zed_node] [INFO] * Spatial Mapping resolution [m]: 0.05
[zed_wrapper-2] 1620226849.169687518 [zed24388529.zed_node] [INFO] * 3D Max Mapping range [m]: 10
[zed_wrapper-2] 1620226849.170536256 [zed24388529.zed_node] [INFO] * Map publishing rate [Hz]: 1
[zed_wrapper-2] 1620226849.170746593 [zed24388529.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] 1620226849.170938338 [zed24388529.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-2] 1620226849.171114562 [zed24388529.zed_node] [INFO] * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] 1620226849.171284899 [zed24388529.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] 1620226849.171363107 [zed24388529.zed_node] [INFO] *** OBJECT DETECTION parameters ***
[zed_wrapper-2] 1620226849.171546787 [zed24388529.zed_node] [INFO] * Object Detection enabled: FALSE
[zed_wrapper-2] 1620226849.171739588 [zed24388529.zed_node] [INFO] * OD min. confidence: 40
[zed_wrapper-2] 1620226849.171943237 [zed24388529.zed_node] [INFO] * Object Detection model: 0 - MULTI CLASS BOX
[zed_wrapper-2] 1620226849.172127941 [zed24388529.zed_node] [INFO] * MultiClassBox people: TRUE
[zed_wrapper-2] 1620226849.172308134 [zed24388529.zed_node] [INFO] * MultiClassBox vehicles: TRUE
[zed_wrapper-2] 1620226849.172490278 [zed24388529.zed_node] [INFO] * MultiClassBox bags: TRUE
[zed_wrapper-2] 1620226849.172683239 [zed24388529.zed_node] [INFO] * MultiClassBox animals: TRUE
[zed_wrapper-2] 1620226849.172872583 [zed24388529.zed_node] [INFO] * MultiClassBox electronics: TRUE
[zed_wrapper-2] 1620226849.173157064 [zed24388529.zed_node] [INFO] * MultiClassBox fruits and vegetables: TRUE
[zed_wrapper-2] 1620226849.173348297 [zed24388529.zed_node] [INFO] * Skeleton fitting: FALSE
[zed_wrapper-2] 1620226849.173523113 [zed24388529.zed_node] [INFO] * Obj. Det. QoS History: KEEP_LAST
[zed_wrapper-2] 1620226849.173744682 [zed24388529.zed_node] [INFO] * Obj. Det. QoS History depth: 1
[zed_wrapper-2] 1620226849.173953547 [zed24388529.zed_node] [INFO] * Obj. Det. QoS Reliability: RELIABLE
[zed_wrapper-2] 1620226849.174168011 [zed24388529.zed_node] [INFO] * Obj. Det. QoS Durability: VOLATILE
[zed_wrapper-2] 1620226849.174267468 [zed24388529.zed_node] [INFO] *** SERVICES ***
[zed_wrapper-2] 1620226849.176047441 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/reset_odometry'
[zed_wrapper-2] 1620226849.177686038 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/reset_pos_tracking'
[zed_wrapper-2] 1620226849.180907776 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/set_pose'
[zed_wrapper-2] 1620226849.181757250 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/enable_obj_det'
[zed_wrapper-2] 1620226849.182249572 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/enable_mapping'
[zed_wrapper-2] 1620226849.184054793 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/start_svo_rec'
[zed_wrapper-2] 1620226849.184750059 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/stop_svo_rec'
[zed_wrapper-2] 1620226849.185279309 [zed24388529.zed_node] [INFO] * '/zed24388529/zed_node/toggle_svo_pause'
[zed_wrapper-2] 1620226849.185401901 [zed24388529.zed_node] [INFO] ***** STARTING CAMERA *****
[zed_wrapper-2] 1620226849.185475309 [zed24388529.zed_node] [INFO] SDK Version: 3.3.3 - Build 21849_cf84d4fa
[zed_wrapper-2] 1620226849.196785872 [zed24388529.zed_node] [INFO] *** SVO OPENING ***
[zed_wrapper-2] Opening in BLOCKING MODE
[zed_wrapper-2] NvMMLiteOpen : Block : BlockType = 261
[zed_wrapper-2] NVMEDIA: Reading vendor.tegra.display-size : status: 6
[zed_wrapper-2] NvMMLiteBlockCreate : Block : BlockType = 261
[zed_wrapper-2] [ZED][Init] Depth mode: PERFORMANCE
[zed_wrapper-2] libv4l2_nvvidconv (0):(802) (INFO) : Allocating (11) OUTPUT PLANE BUFFERS Layout=1
[zed_wrapper-2] libv4l2_nvvidconv (0):(818) (INFO) : Allocating (11) CAPTURE PLANE BUFFERS Layout=0
[zed_wrapper-2] [ZED][Init] Self-calibration disabled
[zed_wrapper-2] 1620226851.299870919 [zed24388529.zed_node] [DEBUG] Opening successfull
[zed_wrapper-2] 1620226851.300253640 [zed24388529.zed_node] [INFO] ZED SDK running on GPU #0
[zed_wrapper-2] 1620226851.300377256 [zed24388529.zed_node] [INFO] * Camera Model -> ZED 2
[zed_wrapper-2] 1620226851.300454025 [zed24388529.zed_node] [INFO] * Serial Number -> 24388529
[zed_wrapper-2] 1620226851.300578793 [zed24388529.zed_node] [INFO] * Input type -> SVO input type
[zed_wrapper-2] 1620226851.300790058 [zed24388529.zed_node] [INFO] * SVO resolution -> 1280x720
[zed_wrapper-2] 1620226851.300948490 [zed24388529.zed_node] [INFO] * SVO framerate -> 30
[zed_wrapper-2] 1620226851.301085963 [zed24388529.zed_node] [DEBUG] Camera-IMU Transform:
[zed_wrapper-2] 55A7879C60
[zed_wrapper-2] 1.000000 0.000000 0.000000 0.000000
[zed_wrapper-2] 0.000000 1.000000 0.000000 0.000000
[zed_wrapper-2] 0.000000 0.000000 1.000000 0.000000
[zed_wrapper-2] 0.000000 0.000000 0.000000 1.000000
[zed_wrapper-2]
[zed_wrapper-2] 1620226851.301172587 [zed24388529.zed_node] [DEBUG] Camera Frame size : 1280x720
[zed_wrapper-2] 1620226851.301246763 [zed24388529.zed_node] [DEBUG] Image Mat size : 640x360
[zed_wrapper-2] 1620226851.301350059 [zed24388529.zed_node] [DEBUG] Depth Mat size : 640x360
[zed_wrapper-2] 1620226851.301600044 [zed24388529.zed_node] [INFO] *** TF FRAMES ***
[zed_wrapper-2] 1620226851.301674252 [zed24388529.zed_node] [INFO] * Map -> map
[zed_wrapper-2] 1620226851.301745645 [zed24388529.zed_node] [INFO] * Odometry -> odom
[zed_wrapper-2] 1620226851.301796557 [zed24388529.zed_node] [INFO] * Base -> base_link
[zed_wrapper-2] 1620226851.301846093 [zed24388529.zed_node] [INFO] * Camera -> zed2_camera_center
[zed_wrapper-2] 1620226851.301897837 [zed24388529.zed_node] [INFO] * Left -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.301985517 [zed24388529.zed_node] [INFO] * Left Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1620226851.302075694 [zed24388529.zed_node] [INFO] * RGB -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.302168078 [zed24388529.zed_node] [INFO] * RGB Optical -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.302266798 [zed24388529.zed_node] [INFO] * Right -> zed2_right_camera_frame
[zed_wrapper-2] 1620226851.302322254 [zed24388529.zed_node] [INFO] * Right Optical -> zed2_right_camera_optical_frame
[zed_wrapper-2] 1620226851.302373294 [zed24388529.zed_node] [INFO] * Depth -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.302424655 [zed24388529.zed_node] [INFO] * Depth Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1620226851.302531407 [zed24388529.zed_node] [INFO] * Point Cloud -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1620226851.302588719 [zed24388529.zed_node] [INFO] * Disparity -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.302646031 [zed24388529.zed_node] [INFO] * Disparity Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1620226851.302697199 [zed24388529.zed_node] [INFO] * Confidence -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.302864944 [zed24388529.zed_node] [INFO] * Confidence Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1620226851.302928240 [zed24388529.zed_node] [INFO] * IMU -> zed2_imu_link
[zed_wrapper-2] 1620226851.303032784 [zed24388529.zed_node] [INFO] * Barometer -> zed2_camera_center
[zed_wrapper-2] 1620226851.303095409 [zed24388529.zed_node] [INFO] * Magnetometer -> zed2_imu_link
[zed_wrapper-2] 1620226851.303161969 [zed24388529.zed_node] [INFO] * Left Temperature -> zed2_left_camera_frame
[zed_wrapper-2] 1620226851.303236689 [zed24388529.zed_node] [INFO] * Right Temperature -> zed2_right_camera_frame
[zed_wrapper-2] 1620226851.304430133 [zed24388529.zed_node] [INFO] *** PUBLISHED TOPICS ***
[zed_wrapper-2] 1620226851.308419201 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/rgb/image_rect_color
[zed_wrapper-2] 1620226851.312610125 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/rgb/image_rect_color
[zed_wrapper-2] 1620226851.312834766 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/rgb/image_rect_gray
[zed_wrapper-2] 1620226851.313903761 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/rgb/image_rect_gray
[zed_wrapper-2] 1620226851.314061298 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/rgb/camera_info
[zed_wrapper-2] 1620226851.314251634 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] 1620226851.316396921 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] 1620226851.316659642 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-2] 1620226851.317699101 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-2] 1620226851.317792189 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/rgb_raw/camera_info
[zed_wrapper-2] 1620226851.317939613 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/left/image_rect_color
[zed_wrapper-2] 1620226851.318955873 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left/image_rect_color
[zed_wrapper-2] 1620226851.319102113 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/left/image_rect_gray
[zed_wrapper-2] 1620226851.322751404 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left/image_rect_gray
[zed_wrapper-2] 1620226851.322991565 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left/camera_info
[zed_wrapper-2] 1620226851.323145325 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/left_raw/image_raw_color
[zed_wrapper-2] 1620226851.324184080 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left_raw/image_raw_color
[zed_wrapper-2] 1620226851.324343921 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/left_raw/image_raw_gray
[zed_wrapper-2] 1620226851.326366391 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left_raw/image_raw_gray
[zed_wrapper-2] 1620226851.326568216 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left_raw/camera_info
[zed_wrapper-2] 1620226851.326723192 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/right/image_rect_color
[zed_wrapper-2] 1620226851.327696891 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/right/image_rect_color
[zed_wrapper-2] 1620226851.327842203 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/right/image_rect_gray
[zed_wrapper-2] 1620226851.328709438 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/right/image_rect_gray
[zed_wrapper-2] 1620226851.328807486 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/right/camera_info
[zed_wrapper-2] 1620226851.328913663 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/right_raw/image_raw_color
[zed_wrapper-2] 1620226851.329860354 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/right_raw/image_raw_color
[zed_wrapper-2] 1620226851.330021634 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/right_raw/image_raw_gray
[zed_wrapper-2] 1620226851.331021253 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/right_raw/image_raw_gray
[zed_wrapper-2] 1620226851.331124325 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/right_raw/camera_info
[zed_wrapper-2] 1620226851.331292998 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/depth/depth_registered
[zed_wrapper-2] 1620226851.332356585 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/depth/depth_registered
[zed_wrapper-2] 1620226851.332474281 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/depth/camera_info
[zed_wrapper-2] 1620226851.332589610 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/stereo/image_rect_color
[zed_wrapper-2] 1620226851.333052363 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/stereo/image_rect_color
[zed_wrapper-2] 1620226851.333163948 [zed24388529.zed_node] [DEBUG] getTopicToAdvertise: /zed24388529/zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] 1620226851.333612109 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] 1620226851.334049198 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/confidence/confidence_map
[zed_wrapper-2] 1620226851.335707571 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/disparity/disparity_image
[zed_wrapper-2] 1620226851.337702233 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/point_cloud/cloud_registered
[zed_wrapper-2] 1620226851.339099453 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/pose
[zed_wrapper-2] 1620226851.340114369 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/pose_with_covariance
[zed_wrapper-2] 1620226851.342530184 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/odom
[zed_wrapper-2] 1620226851.343433323 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/path_map
[zed_wrapper-2] 1620226851.344353741 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/path_odom
[zed_wrapper-2] 1620226851.345354864 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/imu/data
[zed_wrapper-2] 1620226851.346147091 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/imu/data_raw
[zed_wrapper-2] 1620226851.347230582 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/temperature/imu
[zed_wrapper-2] 1620226851.347961816 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/imu/mag
[zed_wrapper-2] 1620226851.348830011 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/atm_press
[zed_wrapper-2] 1620226851.350619520 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/temperature/left
[zed_wrapper-2] 1620226851.351304130 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/temperature/right
[zed_wrapper-2] 1620226851.352423782 [zed24388529.zed_node] [INFO] Advertised on topic: /zed24388529/zed_node/left_cam_imu_transform [LATCHED]
[zed_wrapper-2] 1620226851.352505094 [zed24388529.zed_node] [INFO] Camera-IMU Translation:
[zed_wrapper-2] 0 0 0
[zed_wrapper-2] 1620226851.352617318 [zed24388529.zed_node] [INFO] Camera-IMU Rotation:
[zed_wrapper-2] 7FF68A1138
[zed_wrapper-2] 1.000000 0.000000 0.000000
[zed_wrapper-2] 0.000000 1.000000 0.000000
[zed_wrapper-2] 0.000000 0.000000 1.000000
[zed_wrapper-2]
[zed_wrapper-2] 1620226851.352797063 [zed24388529.zed_node] [INFO] Published static TF: 'zed2_imu_link' -> 'zed2_left_camera_frame'
[zed_wrapper-2] 1620226851.422183929 [zed24388529.zed_node] [DEBUG] Point Cloud thread started
[zed_wrapper-2] 1620226851.422624250 [zed24388529.zed_node] [DEBUG] Grab thread started
[zed_wrapper-2] 1620226851.433411675 [zed24388529.zed_node] [INFO] *** Starting Positional Tracking ***
[zed_wrapper-2] 1620226851.433633691 [zed24388529.zed_node] [INFO] * Waiting for valid static transformations...
[zed_wrapper-2] 1620226851.433733596 [zed24388529.zed_node] [DEBUG] Getting static TF from 'zed2_left_camera_frame' to 'base_link'
[zed_wrapper-2] 1620226851.433980732 [zed24388529.zed_node] [INFO] Static transform Sensor to Base [zed2_left_camera_frame -> base_link]
[zed_wrapper-2] 1620226851.434067581 [zed24388529.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] 1620226851.434171517 [zed24388529.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1620226851.434283709 [zed24388529.zed_node] [DEBUG] Getting static TF from 'zed2_left_camera_frame' to 'zed2_camera_center'
[zed_wrapper-2] 1620226851.434531646 [zed24388529.zed_node] [INFO] Static transform Sensor to Camera Center [zed2_left_camera_frame -> zed2_camera_center]
[zed_wrapper-2] 1620226851.434658078 [zed24388529.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] 1620226851.435311648 [zed24388529.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1620226851.435883426 [zed24388529.zed_node] [DEBUG] Getting static TF from 'zed2_camera_center' to 'base_link'
[zed_wrapper-2] 1620226851.435994050 [zed24388529.zed_node] [INFO] Static transform Camera Center to Base [zed2_camera_center -> base_link]
[zed_wrapper-2] 1620226851.436051555 [zed24388529.zed_node] [INFO] * Translation: {0.000,0.000,0.000}
[zed_wrapper-2] 1620226851.436111523 [zed24388529.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1620226851.488482977 [zed24388529.zed_node] [DEBUG] Video Depth callback called
[zed_wrapper-2] 1620226851.536341938 [zed24388529.zed_node] [DEBUG] Time required to get valid static transforms: 0.002 sec
[zed_wrapper-2] 1620226851.536644243 [zed24388529.zed_node] [INFO] Initial ZED left camera pose (ZED pos. tracking):
[zed_wrapper-2] 1620226851.536779699 [zed24388529.zed_node] [INFO] * T: [0,0.06,0]
[zed_wrapper-2] 1620226851.536919668 [zed24388529.zed_node] [INFO] * Q: [0,0,0,1]
[zed_wrapper-2] 1620226854.915591036 [zed24388529.zed_node] [ERROR] Camera error: CAMERA NOT INITIALIZED
[zed_wrapper-2] 1620226854.915790972 [zed24388529.zed_node] [DEBUG] Grab thread finishedDescribe the bug
Running colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
on a Docker image based on Jetpack 4.4 on Jetson Xavier NX. I got the following error
Starting >>> zed_components
--- stderr: zed_components
CMake Error at /usr/share/cmake-3.10/Modules/FindPackageHandleStandardArgs.cmake:137 (message):
Could NOT find CUDA (missing: CUDA_CUDART_LIBRARY) (found version "10.2")
Call Stack (most recent call first):
/usr/share/cmake-3.10/Modules/FindPackageHandleStandardArgs.cmake:378 (_FPHSA_FAILURE_MESSAGE)
/usr/share/cmake-3.10/Modules/FindCUDA.cmake:1080 (find_package_handle_standard_args)
CMakeLists.txt:46 (find_package)
---
Failed <<< zed_components [5.19s, exited with code 1]
Device information:
To Reproduce
Steps to reproduce the behavior:
nvcr.io/nvidia/l4t-base:r32.4.4RUN apt-get update -y && apt-get install --no-install-recommends lsb-release wget less udev sudo apt-transport-https -y && \
echo "# R32 (release), REVISION: 4" > /etc/nv_tegra_release ; \
wget -q --no-check-certificate -O ZED_SDK_Linux_JP.run https://download.stereolabs.com/zedsdk/3.3/jp44/jetsons && \
chmod +x ZED_SDK_Linux_JP.run ; ./ZED_SDK_Linux_JP.run silent && \
rm -rf /usr/local/zed/resources/* \
rm -rf ZED_SDK_Linux_JP.run && \
rm -rf /var/lib/apt/lists/*
#This symbolic link is needed to use the streaming features on Jetson inside a container
RUN ln -sf /usr/lib/aarch64-linux-gnu/tegra/libv4l2.so.0 /usr/lib/aarch64-linux-gnu/libv4l2.so
RUN cd src ; git clone --branch eloquent https://github.com/stereolabs/zed-ros2-wrapper.git && \
cd .. && \
. /opt/ros/$ROS2_DISTRO/setup.sh && \
rosdep install --from-paths src --ignore-src -r -y && \
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
Expected behavior
I expect to have the wrapper package building correctly.
ZED SDK for Jetpack 4.2
Ros2 crystal
ubuntu 18.04
Board Jetson tx2 Nvidia
i try to build the zed-ros 2-wrapper into my ros2 crystal workspace but when i execute the following command to build the package happen a multiple errors.
colcon build --symlink-install --packages-select stereolabs_zed --cmake-args=-DCMAKE_BUILD_TYPE=Release
Failed <<< stereolabs_zed [ Exited with code 2 ]
Summary: 0 packages finished [39.2s]
1 package failed: stereolabs_zed
1 package had stderr output: stereolabs_zed
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.