The ublox package provides support for u-blox GPS receivers. Only the serial configuration of the driver is documented here, but TCP/UDP communication is also supported by the driver (untested).
The driver was originally written by Johannes Meyer. Changes made later are detailed in the version history below.
Example .yaml configuration files are included in ublox_gps/config. Consult the u-blox documentation for your device for the recommended settings.
The ublox_gps node supports the following parameters for all products and firmware versions:
device: Path to the device port. Defaults to/dev/ttyACM0.raw_data: Whether the device is a raw data product. Defaults to false. Firmware <= 7.03 only.load: Parameters for loading the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msgload/mask: uint32_t. Mask of the configurations to load.load/device: uint32_t. Mask which selects the devices for the load command.
save: Parameters for saving the configuration to non-volatile memory. Seeublox_msgs/CfgCFG.msgsave/mask: uint32_t. Mask of the configurations to save.save/device: uint32_t. Mask which selects the devices for the save command.
uart1/baudrate: Bit rate of the serial communication. Defaults to 9600.uart1/in: UART1 in communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values.uart1/out: UART1 out communication protocol. Defaults to UBX, NMEA & RTCM. SeeCfgPRTmessage for possible values.frame_id: ROS name prepended to frames produced by the node. Defaults togps.rate: Rate in Hz of measurements. Defaults to 4.nav_rate: How often navigation solutions are published in number of measurement cycles. Defaults to 1.enable_ppp: Enable precise-point-positioning system. Defaults to false.gnss/sbas: Enable satellite-based augmentation system. Defaults to false.sbas/max: Maximum number of SBAS channels. Defaults to 0.sbas/usage: SeeCfgSBASmessage for details. Defaults to 0.dynamic_model: Possible values below. Defaults toportable. See u-blox documentation for further description.portablestationarypedestrianautomotiveseaairborne1: Airborne, max acceleration = 1Gairborne2: Airborne, max acceleration = 2Gairborne4: Airborne, max acceleration = 4Gwristwatch
fix_mode: Type of fixes supported:2d,3dorboth.dr_limit: Max time in seconds to use dead reckoning after signal is lost. Defaults to 0.dat: Configuring the datum type (optional). See the CfgDAT message.dat/set: If true, the node will the datum based on the parameters below (required if true). Defaults to false.dat/majA: Semi-major Axis [m]dat/flat: 1.0 / Flatteningdat/shift: [X-axis, Y-axis, Z-axis] shift [m]dat/rot: [X, Y, Z] rotation [s]dat/scale: scale change [ppm]
nmea/set: If true, the NMEA will be configured with the parameters below.nmea/version: NMEA version. Must be set ifnmea/setis true.nmea/num_sv: Maximum Number of SVs to report per TalkerId. Must be set ifnmea/setis true.nmea/compat: Enable compatibility mode. Must be set ifnmea/setis true.nmea/consider: Enable considering mode. Must be set ifnmea/setis true.nmea/filter: Namespace for filter flags.nmea/filter/pos: Disable position filtering. Defaults to false.nmea/filter/msk_pos: Disable masked position filtering. Defaults to false.nmea/filter/time: Disable time filtering. Defaults to false.nmea/filter/date: Disable date filtering. Defaults to false.nmea/filter/sbas: Enable SBAS filtering. Defaults to false.nmea/filter/track: Disable track filtering. Defaults to false.
gnssparameters:gnss/gps: Enable GPS receiver. Defaults to true.gnss/glonass: Enable GLONASS receiver. Defaults to false.gnss/beidou: Enable BeiDou receiver. Defaults to false.gnss/qzss: Enable QZSS receiver. Defaults to false.gnss/qzss_sig_cfg: QZSS signal configuration. Defaults to L1CA. SeeCfgGNSSmessage for constants.
nmeaparameters:nmea/set: If true, the NMEA will be configured.nmea/version: NMEA version. Must be set ifnmea/setis true.nmea/num_sv: Maximum Number of SVs to report per TalkerId. Must be set ifnmea/setis true.nmea/sv_numbering: Configures the display of satellites that do not have an NMEA-defined value. Must be set ifnmea/setis true.nmea/compat: Enable compatibility mode. Must be set ifnmea/setis true.nmea/consider: Enable considering mode. Must be set ifnmea/setis true.nmea/limit82: Enable strict limit to 82 characters maximum. Defaults to false.nmea/high_prec: Enable high precision mode. Defaults to false.nmea/filter: Namespace for filter flags.nmea/filter/pos: Enable position output for failed or invalid fixes. Defaults to false.nmea/filter/msk_pos: Enable position output for invalid fixes. Defaults to false.nmea/filter/time: Enable time output for invalid times. Defaults to false.nmea/filter/date: Enable date output for invalid dates. Defaults to false.nmea/filter/gps_only: Restrict output to GPS satellites only. Defaults to false.nmea/filter/track: Enable COG output even if COG is frozen. Defaults to false.
nmea/gnssToFilt: Filters out satellites based on their GNSS.nmea/gnssToFilt/gps: Disable reporting of GPS satellites. Defaults to false.nmea/gnssToFilt/sbas: Disable reporting of SBAS satellites. Defaults to false.nmea/gnssToFilt/qzss: Disable reporting of QZSS satellites. Defaults to false.nmea/gnssToFilt/glonass: Disable reporting of GLONASS satellites. Defaults to false.nmea/gnssToFilt/beidou: Disable reporting of BeiDou satellites. Defaults to false.
nmea/main_talker_id: This field enables the main Talker ID to be overridden. Defaults to 0.nmea/gsv_talker_id: This field enables the GSV Talker ID to be overridden. Defaults to [0, 0].
save_on_shutdown: If true, the node will send aUBX-UPD-SOScommand to save the BBR to flash memory on shutdown. Defaults to false.clear_bbr: If true, the node will send aUBX-UPD-SOScommand to clear the flash memory during configuration. Defaults to false.- Additional
gnssparamsgnss/galileo: Enable Galileo receiver. Defaults to false.gnss/imes: Enable IMES receiver. Defaults to false.
nmea/bds_talker_id: (See other NMEA configuration parameters above) Sets the two characters that should be used for the BeiDou Talker ID.
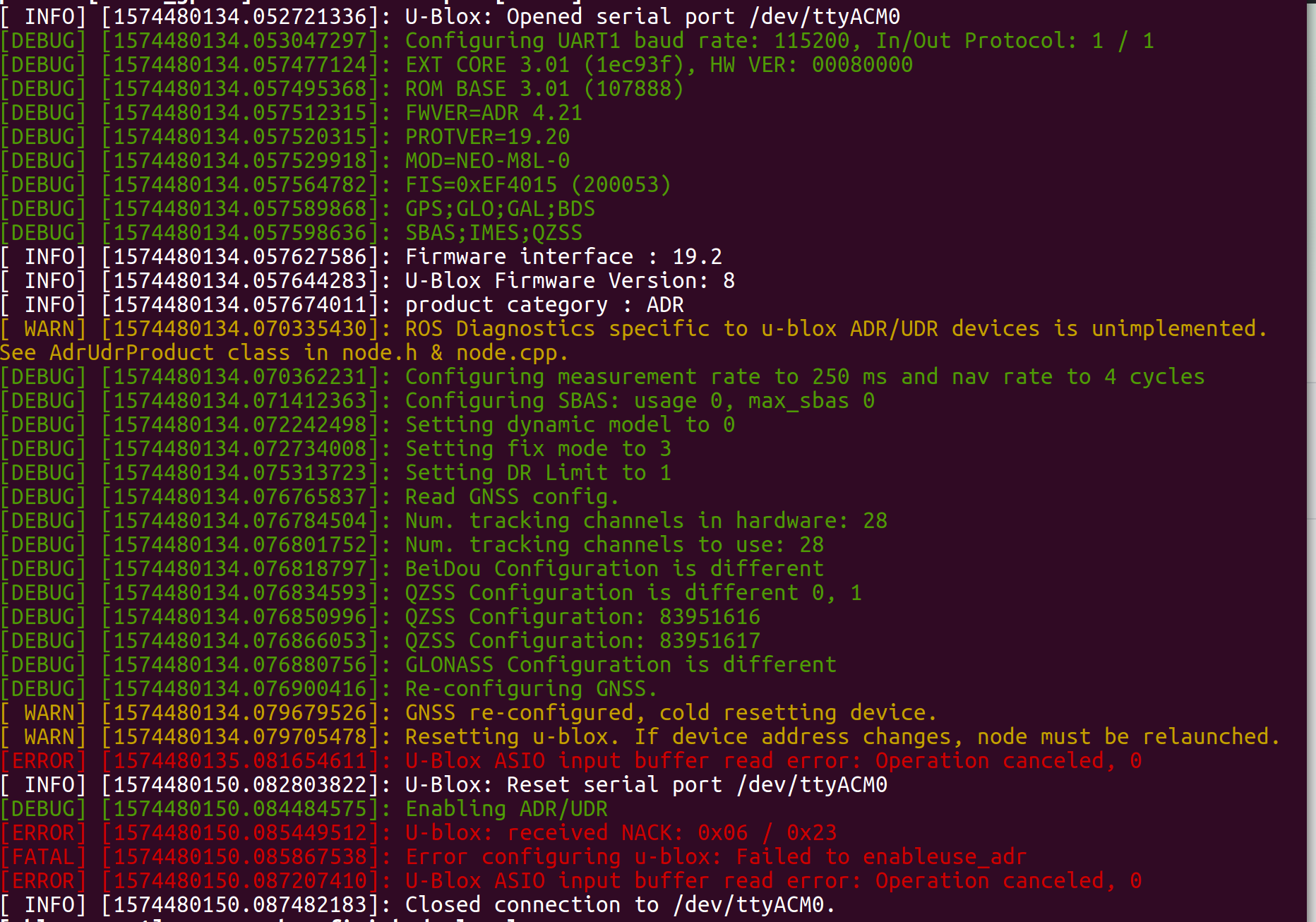
use_adr: Enable ADR/UDR. Defaults to true.nav_rateshould be set to 1 Hz.
tmode3: Time Mode. Required. See CfgTMODE3 for constants.arp/lla_flag: True if the Fixed position is in Lat, Lon, Alt coordinates. False if ECEF. Required iftmode3is set to fixed.arp/position: Antenna Reference Point position in [m] or [deg]. Required iftmode3is set to fixed.arp/position_hp: Antenna Reference Point High Precision position in [0.1 mm] or [deg * 1e-9]. Required if tmode3 is set to fixed.arp/acc: Fixed position accuracy in [m]. Required iftmode3is set to fixed.sv_in/reset: Whether or not to reset the survey in upon initialization. If false, it will only reset if the TMODE is disabled. Defaults to true.sv_in/min_dur: The minimum Survey-In Duration time in seconds. Required tmode3 is set to survey in.sv_in/acc_lim: The minimum accuracy level of the survey in position in meters. Requiredtmode3is set to survey in.
dgnss_mode: The Differential GNSS mode. Defaults to RTK FIXED. SeeCfgDGNSSmessage for constants.
tim_tm2: Enable this message for GPS time-stamps everytime an external interrupt signal is received.
- currently unimplemented. See
FtsProductclass inublox_gpspackagenode.h&node.cppfiles.
~fix(sensor_msgs/NavSatFix)
Navigation Satellite fix.
~fix_velocity(geometry_msgs/TwistWithCovarianceStamped)
Velocity in local ENU frame.
To enable printing INF messages to the ROS console, set the parameters below.
inf/all: This is the default value for the INF parameters below, which enable printing u-bloxINFmessages to the ROS console. It defaults to true. Individual message types can be turned off by setting their corresponding parameter to false.inf/debug: Whether to configure the UBX and NMEA ports to send Debug messages and print receivedINF-Debugmessages toROS_DEBUGconsole.inf/error: Whether to enable Error messages for the UBX and NMEA ports and print receivedINF-Errormessages toROS_ERRORconsole.inf/notice: Whether to enable Notice messages for the UBX and NMEA ports and print receivedINF-Notice messages toROS_INFO` console.inf/test: Whether to enable Test messages for the UBX and NMEA ports and print receivedINF-Testmessages toROS_INFOconsole.inf/warning: Whether to enable Warning messages for the UBX and NMEA ports and print receivedINF-Warningmessages to theROS_WARNconsole.
To publish a given u-blox message to a ROS topic, set the parameter shown below to true. The node sets the rate of the u-blox messages to 1 measurement cycle.
publish/all: This is the default value forpublish/<class>/allparameters below. It defaults to false. Individual message classes and messages can be enabled or disabled by setting the parameters described below to false.
publish/aid/all: This is the default value for thepublish/aid/<message>parameters below. It defaults topublish/all. Individual messages can be enabled or disabled by setting the parameters below.publish/aid/alm: Topic~aidalmpublish/aid/eph: Topic~aidephpublish/aid/hui: Topic~aidhui
publish/rxm/all: This is the default value for thepublish/rxm/<message>parameters below. It defaults topublish/all. Individual messages can be enabled or disabled by setting the parameters below.publish/rxm/alm: Topic~rxmalmpublish/rxm/eph: Topic~rxmephpublish/rxm/raw: Topic~rxmraw. Type is eitherRxmRAWorRxmRAWXdepending on firmware version.publish/rxm/rtcm: Topic~rxmrtcm. Firmware >= 8 onlypublish/rxm/sfrb: Topic~rxmsfrb. Type is eitherRxmSFRBorRxmSFRBXdepending on firmware version.
publish/mon/all: This is the default value for thepublish/mon/<message>parameters below. It defaults topublish/all. Individual messages can be enabled or disabled by setting the parameters below.publish/mon/hw: Topic~monhw
- NAV messages are time stamped with
iTOW, and multiple messages can be synchronized with ublox_msg_filters publish/nav/all: This is the default value for thepublish/mon/<message>parameters below. It defaults topublish/all. Individual messages can be enabled or disabled by setting the parameters below.publish/nav/att: Topic~navatt. ADR/UDR devices onlypublish/nav/clock: Topic~navclockpublish/nav/posecef: Topic~navposecefpublish/nav/posllh: Topic~navposllh. Firmware <= 6 only. For firmware 7 and above, see NavPVTpublish/nav/pvt: Topic~navpvt. Firmware >= 7 only.publish/nav/relposned: Topic~navrelposned. HPG Rover devices onlypublish/nav/heading: Topic~navheading. HP Position receiver devices only. For firmware 9 and abovepublish/nav/sat: Topic~navsatpublish/nav/sol: Topic~navsol. Firmware <= 6 only. For firmware 7 and above, see NavPVTpublish/nav/status: Topic~navstatuspublish/nav/svin: Topic~navsvin. HPG Reference Station Devices onlypublish/nav/svinfo: Topic~navsvinfopublish/nav/velned: Topic~navvelned. Firmware <= 6 only. For firmware 7 and above, see NavPVT
publish/esf/all: This is the default value for thepublish/esf/<message>parameters below. It defaults topublish/allfor ADR/UDR devices. Individual messages can be enabled or disabled by setting the parameters below.publish/esf/alg: Topic~esfalgpublish/esf/ins: Topic~esfinspublish/esf/meas: Topic~esfmeaspublish/esf/raw: Topic~esfrawpublish/esf/status: Topic~esfstatus
publish/hnr/pvt: Topic~hnrpvt. ADR/UDR devices only
publish/tim/tm2: Topictimtm2. TIM devices only
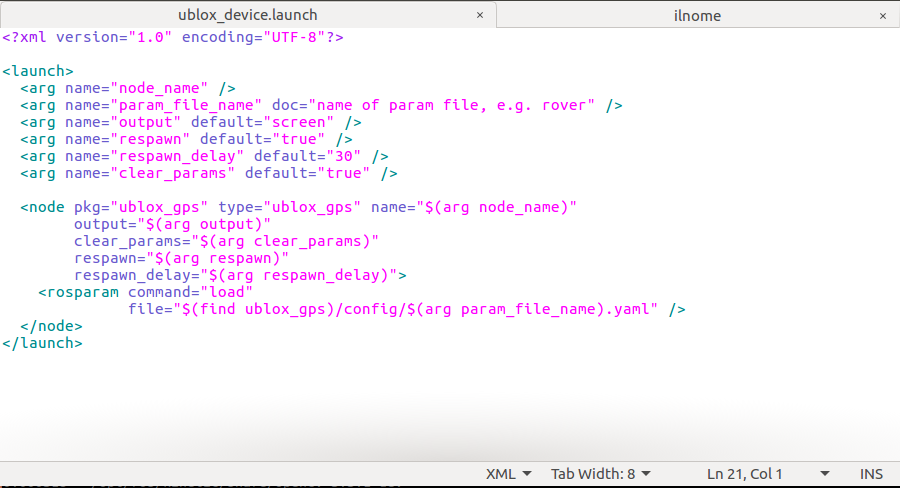
A sample launch file ublox_device.launch loads the parameters from a .yaml file in the ublox_gps/config folder, sample configuration files are included. The required arguments are node_name and param_file_name.
The two topics to which you should subscribe are ~fix and ~fix_velocity. The angular component of fix_velocity is unused.
-
1.1.4:
- Added messages for firmware 9:
NavRELPOSNED9. - Added option to publish
sensor_msgs/Imumessage for High Precision Position Receiver devices with firmware version >= 9 for moving base applications (For example ZED-F9P; UBX-19009093 AppNote).
- Added messages for firmware 9:
-
1.1.3:
- Update by TUC-ProAut
- Added raw data stream output. To publish ros messages set rosparam
raw_data_stream/publishto true. To store to a logfile set rosparamset raw_data_stream/dirto the appropriated directory. This feature has nothing todo with Raw Data Products. - Added flag
config_on_startupto deactivate configuration of ublox.
-
1.1.2:
- BUG FIX for NavSatFix messages for firmware >=7. The NavSatFix now only uses the NavPVT message time if it is valid, otherwise it uses ROS time.
- BUG FIX for TMODE3 Fixed mode configuration. The ARP High Precision position is now configured correctly.
- BUG FIX for
NavDGPSmessage which had the wrong Message ID. - After GNSS configuration & reset, I/O resets automatically, without need for restart.
- Added
UBX-UPDmessages. For firmware version 8, the node can now save the flash memory on shutdown and clear the flash memory during configuration based on ROS params. - Added
CfgGPSmessage andMonHW6message for firmware version 6. - Added respawn parameters to example launch file.
- Added parameters to load/save configuration.
- Added raw_data parameter for Raw Data Products.
- Changed name of "subscribe" parameter namespace to "publish" for clarity.
- Migrated all callback handling to
callback.hfromgps.handgps.cpp. ACK messages are now processed through callback handlers. - Modified how the I/O stream is initialized so that the node now handles parsing the port string.
- Changed class names of Ublox product components (e.g. UbloxTim -> TimProduct) for clarity.
- Cleaned up ublox custom serialization classes by adding typedefs and using count to determine repeating block statements instead of using try-catch statements to serialize stream.
- Added doxygen documentation
-
1.1.1:
- BUG FIX for acknowledgments. The last received ack message was accessed by multiple threads but was not atomic. This variable is now thread safe.
- BUG FIX for GNSS configuration for Firmware 8, the GNSS configuration is now verified & modified properly.
- BUG FIX for fix diagnostics. NumSV was displaying incorrectly. For firmware versions >=7, the NavPVT flags variable is now compared to the constants from the NavPVT message not NavSOL.
- Removed ublox_version param, value is now determined by parsing MonVER.
- Organized parameters into namespaces.
- Better parameter checking. Checks that unsigned ints and vectors of unsigned ints are in bounds.
- Changed rtcm/rate parameter to a vector instead of a scalar, now each RTCM id can be set to a different rate.
- Diagnostic variables are displayed more clearly with units included.
- For HPG Rovers, added diagnostic updater for Carrier Phase Solution.
- Added CfgNMEA messages for each firmware version and a CfgDAT message, as well as parameters to configure the NMEA and Datum.
- Added constants for NavSAT_SV flags bit mask.
-
1.1.0:
- BUG FIX for NAV-PVT messages for firmware 7. The NAV-PVT message is shorter for firmware version 7, the new message is
NavPVT7 - BUG FIX for SBAS configuration, it now configures SBAS only if the device is SBAS capable. Previously, if enable_sbas was set to false, it would not configure, meaning that SBAS could not be turned off.
- BUG FIX, the baudrate of the serial I/O port was not configured correctly, on the device it was set to the user desired settings, but on the computer it was always set to 4800.
- BUG FIX, Diagnostics for Nav Status are now updated in firmware version 6.
- BUG FIX, The method which waited for ACKs now checks if the ACK is from the correct class and message ID.
- Added messages for
CfgTMODE3,CfgHNR,CfgRST,CfgINF,NavATT,ESFmessages,Infmessage (for all INF types),HnrPVT,MgaGAL,NavSAT,MonHw,NavPVT7(for firmware version 7). - Restructured Node class so that it now uses composition. The main node contains instances of classes which implement
UBloxInterface, and calls the methods for each interface added to the node. The classes which implement the interface add new features that are not generic to all firmware versions or products. Each firmware version (6-8) has an interface, and each product category has one (SPG, HPG REF, HPG ROV, TIM, FTS, ADR/UDR). The product type is determined from parsing theMonVERmessage. - Added implementations of
ComponentInterfacecalledUbloxHpgRefandUbloxHpgRovfor HPG reference station and rover devices. The reference station tmode3 can be configured upon startup (see Options section) and the rover dgnss mode can be set. After survey in, once the reference station entire time mode, the nav_rate is set to the user desired value (it must be 1 Hz during survey-in) and the RTCM output messages are enabled. The state can be monitored through the rqt_runtime_monitor. These classes were tested on C94-M8P devices. - Added an implementation of
ComponentInterfacecalledUbloxAdrUdrfor ADR/UDR devices. It which subscribes toNavATTand ESF messages and configures useAdr. The diagnostics monitor specific to these devices is not implemented. This class has not been tested on a hardware device. - Added a partial implementation of
UbloxTimfor TIM devices which subscribes toRxmRAWXandRxmSFRBXmessages. ThegetRosParams(),configureUblox(), andinitializeDiagnostics()methods are unimplemented. - Added a skeleton class for
UbloxFtsfor FTS devices which is unimplemented. See theublox_gpsnode.cppandnode.hfiles. - Changed how GNSS is configured in firmware version 8. The documentation recommends a cold restart after reconfiguring the GNSS, and will reset the device if it receives a
CfgGNSSmessage, even if the settings do not change. For firmware version 8, before reconfiguring, the node first checks if the current GNSS settings are the same as the desired settings. If so, it will not send a CfgGNSS message to the device. After reconfiguring, it will cold reset the GNSS. - Migrated I/O initialization to the
Gpsclass from theNodeclass. - INF messages are now printed to the ROS console.
- Changed how debug statements are displayed. If the debug parameter is set to 1 or greater, it prints debug messages.
- BUG FIX for NAV-PVT messages for firmware 7. The NAV-PVT message is shorter for firmware version 7, the new message is
-
1.0.0:
- Added messages for firmware 8:
NavPVT,RxmRAWX,RxmSFRBX. - Modified ConfigGNSS and MonVER to include repeated blocks and added ConfigGNSS_Block (configures all GNSS at once) and MonVER_Extension (for MonVER_Char blocks).
- MonVER info is now published upon initialization.
- Fixed SBAS crashing issue (node crashed if device didn't have SBAS capabilities)
- Modified remaining messages to update to firmware 8
- Added
UbloxNodeabstract class which does all previous node functions which are the same for all firmware versions. Added subclasses which do functions specific to a given firmware version (e.g. subscribing to NavPVT messages). - Added a read lock to AsyncWorker
- Removed hard-coded values from
GpsandNodeclasses specific to a certain device and changed them to configurable parameters. Modified example launch file accordingly. - Added example parameter yaml files and launch file to load parameters from this file.
- Moved implementations of Callback functions into
callback.h(fromgps.handgps.cpp) - Updated formatting of some files per google style guide spec (e.g. 80 chars per line).
- Added messages for firmware 8:
-
0.0.5:
- Reformat files under
ublox_gps
- Reformat files under
-
0.0.4:
- Added install targets.
-
0.0.3:
- Added the
enable_glonass,enable_beidouandenable_pppoptions. - Added the
ublox_versionoption. Consult known issues for important details. - Added
numSVsfield to the RQT monitor.
- Added the
-
0.0.2:
- Changed
meas_rateto simplyrate, which is in Hz.meas_rateis computed automatically.
- Changed
-
0.0.1:
- All topics are now published on a private node handle.
- Velocities are published as stamped twist messages with covariance. Angular components are unused.
hAcc,vAccandsAccare used to generate diagonal covariances.- Velocities use the correct convention: X-Y-Z = East-North-Up.
- 2D or 3D fix correspond to
STATUS_FIX(previously only 3D). fixandfix_velocityare time-stamped synchronously, using theiTOWto check arrival times.- Added options for changing the CFG-NAV5 settings (see above).
- Added support for
diagnostic_updater. - "received ACK" messages are elevated to debug level 2.
- Corrected issue where baudrate was not set correctly using rosparam.
- Corrected issue where socket destructors were not called.
-
0.0.0:
- Forked from https://github.com/tu-darmstadt-ros-pkg/ublox
- Updated to use catkin.
-
Create the .msg file and add it to
ublox_msgs/msg. Make sure the file includes the constantsCLASS_IDandMESSAGE_ID. -
Modify
ublox_msgs/include/ublox_msgs/ublox_msgs.h. a. Include the message header. b. Make sure the message's class constant is declared in theublox_msgs::Classnamespace. c. Declare the message's ID constant in theublox_messages::Message::<CLASS_NAME>namespace. -
Declare the message in
ublox_msgs/src/ublox_msgs.cpp. -
If the message has a repeated or optional block of varying size, create an additional message for the repeating block and include it in the message. a. Include the block message in the
ublox_msgs/include/ublox_msgs/ublox_msgs.hfile. b. Modifyublox_msgs/include/ublox/serialization/ublox_msgs.hand add a customSerializer. If the message doesn't include the number of repeating/optional blocks as a parameter, you can infer it from the count/size of the message, which is the length of the payload. -
Modify
ublox_gps/src/node.cpp(and the header file if necessary) to either subscribe to the message or send the configuration message. Be sure to modify the appropriate subscribe function. For messages which apply to all firmware/hardware, modifyUbloxNode::subscribe(). Otherwise modify the appropriate firmware or hardware's subscribe function, e.g.UbloxFirmware8::subscribe(),HpgRovProduct::subscribe(). If the message is a configuration message, consider modifyingublox_gps/src/gps.cpp(and the header file) to add a configuration function.
If a given message protocol applies to multiple message IDs (e.g. the Inf message), do not include the message ID in the message itself.
When declaring the message, for the first declaration, use DECLARE_UBLOX_MESSAGE macro. For the following declarations use the DECLARE_UBLOX_MESSAGE_ID macro.
The node.cpp file in ublox_gps contains a main Node class called UbloxNode which acts as the ROS Node and handles the node initialization, publishers, and diagnostics. UbloxNode contains a vector components_ of instances of ComponentInterface. The UbloxNode::initialize() calls each component's public interface methods. The node contains components for both the firmware version and the product category, which are added after parsing the MonVER message. Any class which implements ComponentInterface can be added to the UbloxNode components_ vector and its methods will be called by UbloxNode. Simply add an implementation of ComponentInterface to the ublox_gps node.h and node.cpp files. Behavior specific to a given firmware or product should not be implemented in the UbloxNode class and instead should be implemented in an implementation of ComponentInterface.
Currently there are implementations of ComponentInterface for firmware versions 6-8 and product categories HpgRefProduct, HpgRovProduct, AdrUdrProduct, TimProduct, FtsProduct. SPG products do not have their own implementation of ComponentInterface, since the Firmware classes implement all of the behavior of SPG devices.
HpgRefProduct and HpgRovProduct have been tested on the C94-M8P device.
- Modify the
getRosParams()method in the appropriate implementation of ComponentInterface (e.g. UbloxNode, UbloxFirmware8, HpgRefProduct, etc.) and get the parameter. Group multiple related parameters into a namespace. Use all lower case names for parameters and namespaces separated with underscores.
- If the type is an unsigned integer (of any size) or vector of unsigned integers, use the
ublox_node::getRosUintmethod which will verify the bounds of the parameter. - If the type is an int8 or int16 or vector of int8's or int16's, use the
ublox_nod::getRosIntmethod which will verify the bounds of the parameter. (This method can also be used for int32's but ROS has methods to get int32 parameters as well).
- If the parameter is used during configuration also modify the
ComponentInterface'sconfigureUblox()method to send the appropriate configuration message. Do not send configuration messages ingetRosParams(). - Modify this README file and add the parameter name and description in the appropriate section. State whether there is a default value or if the parameter is required.
- Modify one of the sample
.yamlconfiguration files inublox_gps/configto include the parameter or add a new sample.yamlfor your device.
TimProduct and FtsProduct are currently unimplemented skeleton classes. AdrUdrProduct is implemented, with the exception of initializeRosDiagnostics() and has not been tested on hardware.
UbloxFirmware7 has not been properly tested on a device with firmware version 7. UbloxFirmware6 has been tested on a device with firmware version 8, but not with firmware version 6.
For debugging messages set the debug parameter to > 0. The range for debug is 0-4. At level 1 it prints configuration messages and checksum errors, at level 2 it also prints ACK/NACK messages and sent messages. At level 3 it prints the received bytes being decoded by a specific message reader. At level 4 it prints the incoming buffer before it is split by message header.
- Why can't the ublox_gps node open my device, even though I have correctly specified the path in
/dev?
- Make sure you are the owner of the device, or a member of
dialoutgroup.
Consult the official protocol spec for details on packets supported by u-blox devices.