lijiangnanbit / path_optimizer Goto Github PK
View Code? Open in Web Editor NEWOptimization-based real-time path planning for vehicles.
License: MIT License
Optimization-based real-time path planning for vehicles.
License: MIT License















































































































Hi, first of all I want to thank you for this great code. Though there are some code I don't understand. For example, the constraint function in your TensionSmoother, why the lower bound and upper bound is the same value?

Hey there. Nice solution you have here, looks to be working great. I was wondering if you have a paper or some other reference to the algorithms and thinking here? I would like to read through, to better understand how you implemented the code :)
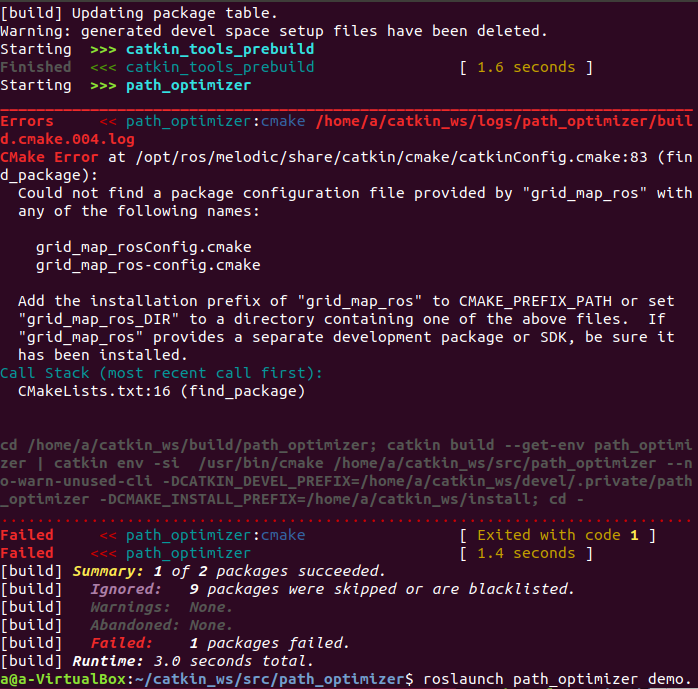
Hello, First of all, sorry for being a beginner. I did install dependencies and build tap as described in the readme. but the third command
sudo bash path_optimizer/scripts/install_deps.sh
After hitting , I got the following error: I ignored it and even tried roslaunch, but the image file was not loaded.
what could i do?

Hi, thank you for sharing the amazing repo.
Here is what I found while trying to run your demo.launch
A trajectory isn't generated after following the guidance in readme.md.
commit: a95f0d0
Nothing has been modified including config file.
CMakeLists.txt:24: error: By not providing "FindIPOPT.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "IPOPT", but CMake did not find one. Could not find a package configuration file provided by "IPOPT" with any of the following names: IPOPTConfig.cmake ipopt-config.cmake Add the installation prefix of "IPOPT" to CMAKE_PREFIX_PATH or set "IPOPT_DIR" to a directory containing one of the above files. If "IPOPT" provides a separate development package or SDK, be sure it has been installed.
rviz 中 MarkArray 会出现 StatusError, 不知道怎么搞
Hi,
I would like to know where do the -cos(theta) and -sin(theta) come from in function setConstraintMatrix (tension_smoother.cpp). Is it related to the frenet coordinates transformation?
If it is possible, is there any material about transforming the reference line smoothing problem to qp form? I want to know how to build the hessian, gradient and constraint matrix from scratch. Thank you.
I am a beginner of ROS. I followed your instruction to build package.
After I input this command, the following error occured.
Could you please give some hints to me. Thanks a lot in advance.
catkin build path_optimizer
--------------------------------------------------------------------------------
Profile: default
Extending: [env] /opt/ros/kinetic::/opt/Qt5.5.1/5.5/gcc_64/lib/cmake:/opt/Qt5.5.1/5.5/gcc_64/lib/cmake
Workspace: /home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer
--------------------------------------------------------------------------------
Build Space: [exists] /home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer/build
Devel Space: [exists] /home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer/devel
Install Space: [unused] /home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer/install
Log Space: [missing] /home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer/logs
Source Space: [exists] /home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer/src
DESTDIR: [unused] None
--------------------------------------------------------------------------------
Devel Space Layout: linked
Install Space Layout: None
--------------------------------------------------------------------------------
Additional CMake Args: None
Additional Make Args: None
Additional catkin Make Args: None
Internal Make Job Server: True
Cache Job Environments: False
--------------------------------------------------------------------------------
Whitelisted Packages: None
Blacklisted Packages: None
--------------------------------------------------------------------------------
Workspace configuration appears valid.
--------------------------------------------------------------------------------
[build] No packages were found in the source space '/home/rgs/Desktop/1.code/demo/workspace/src/path_optimizer/src'
[build] Given package 'path_optimizer' is not in the workspace
I want to achieve the same effect as the video "Simulation in dynamic environment". How can I use it?
Is there a demo that you can provide?
thank you!
Are there any license terms for using this source code?
I would like to use some of the codes into our projects, and we would like to know whether that is possible or not.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "tinyspline_ros"
with any of the following names:
tinyspline_rosConfig.cmake
tinyspline_ros-config.cmake
Add the installation prefix of "tinyspline_ros" to CMAKE_PREFIX_PATH or set
"tinyspline_ros_DIR" to a directory containing one of the above files. If
"tinyspline_ros" provides a separate development package or SDK, be sure it
has been installed.
Where should I check this question?
Can you write the system transfer equation?
I have confusion when read code in function of setConstraintMatrix
I don't know the rule for choosing infeasible or feasible points in DP process as shown in function 'graphSearchDp(PathOptimizationNS::ReferencePath *)' of file named reference_path_smoother.cpp.
if ((ref_curvature < 0 && cur_l < ref_r) || (ref_curvature > 0 && cur_l > ref_r)
|| dp_point.dis_to_obs_ < search_threshold) {
dp_point.is_feasible_ = false;
}
if (i == 0 && dp_point.lateral_index_ != start_lateral_index) dp_point.is_feasible_ = false;
if (i == 0 && dp_point.lateral_index_ == start_lateral_index) {
dp_point.is_feasible_ = true;
dp_point.dir_ = start_state_.z;
dp_point.cost_ = 0.0;
}Could you please explain that for me? Thank you so much!!
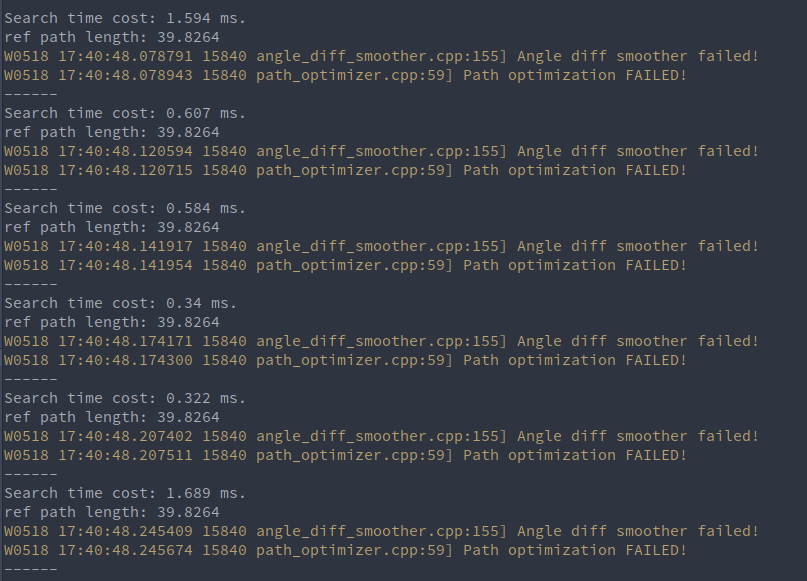
Hi, i have tested your code with ros kinetic ,but I found some question when I run the demo, the log like this
WARNING: Logging before InitGoogleLogging() is written to STDERR
I0513 08:58:02.135192 11617 tension_smoother.cpp:84] Tension smoother succeeded!
I0513 08:58:02.135460 11617 reference_path_impl.cpp:417] Reference states are built from spline.
[1] 11617 segmentation fault (core dumped) rosrun path_optimizer path_optimizer_benchmark
Then I found some problem with the code :
auto clearance_0 = getClearanceWithDirectionStrict(c0, map);
I wonder if i have some problem with my ros package grip map?
Do you consider using stitch path in optimizer process ? If reference line has changed sharply , such as lane change , it would be uncomfortable
The repo has new smoothing method called tension_smoother_2.
Possibly the method mentioned in this issue?
Do you have any references(possibly paper?) for the new method?
Have you consider using precise path boundary , using four circles substitute for vehicle body may reduce the solution space ?
I want to ask what the constraints of the objective function are;
Whether both curvature and curvature change can be constrained
目标函数的形式是怎么样的,能否同时约束曲率和曲率变化率
您好,不知道您有没有单独测试过,以路径长度s为自变量,分别对x和y进行三次样条插值然后再计算曲率,得到的曲率并不是光滑连续的


上面两幅图片,第一张是我先从一条五阶贝塞尔曲线上采点 (五阶贝塞尔曲线长度为1.68 m,我以0.01 m间隔进行采样),然后再用三次样条分别对x和y插值得到的结果,第二张图片是对应的曲率计算结果。
我尝试以x为自变量y为因变量进行插值,得到的曲率结果如下

首尾的曲率看上去不是连续的,中间部分也有一些毛刺
@LiJiangnanBit First, thank you for your good sharing about the Repo. Could you please give some comments for the issue as shown below ? Appreciate for your help.

你好,请问有相关论文和资料吗
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.